用于点云压缩的混合框架的制作方法
- 国知局
- 2024-08-02 14:42:53
本实施方案整体涉及用于点云压缩和处理的方法和装置。
背景技术:
1、点云(pc)数据格式是跨若干商业领域的通用数据格式,例如从自主驾驶、机器人、增强现实/虚拟现实(ar/vr)、土木工程、计算机图形到动画/电影产业。3d lidar(激光雷达)传感器已部署在自动驾驶汽车中,并且velodyne velabit、apple ipad pro 2020和intel realsense lidar相机l515发布经济实惠的lidar传感器。随着感测技术的进步,3d点云数据变得比以往更加实用,并有望成为本文讨论的应用的最终推动者。
技术实现思路
1、根据实施方案,提供了一种对用于点云的点云数据进行解码的方法,该方法包括:使用第一解码策略对第一数据集进行解码,其中所述第一数据集对应于所述点云数据的第一位级别子集;并且使用第二解码策略对第二数据集进行解码,其中所述第二数据集对应于所述点云数据的第二位级别子集。该方法可进一步包括使用第三解码策略对第三数据集进行解码,其中所述第三数据集对应于所述点云数据的第三位级别子集。
2、根据另一实施方案,提供了一种对用于点云的点云数据进行编码的方法,该方法包括:使用第一编码策略对第一数据集进行编码,其中所述第一数据集对应于所述点云数据的第一位级别子集;并且使用第二编码策略对第二数据集进行编码,其中所述第二数据集对应于所述点云数据的第二位级别子集。该方法可进一步包括使用第三编码策略对第三数据集进行编码,其中所述第三数据集对应于所述点云数据的第三位级别子集。
3、根据另一实施方案,提供了一种对用于点云的点云数据进行解码的装置,该装置包括一个或多个处理器,其中所述一个或多个处理器被配置为:使用第一解码策略对第一数据集进行解码,其中所述第一数据集对应于所述点云数据的第一位级别子集;并且使用第二解码策略对第二数据集进行解码,其中所述第二数据集对应于所述点云数据的第二位级别子集。该装置可进一步被配置为使用第三解码策略对第三数据集进行解码,其中所述第三数据集对应于所述点云数据的第三位级别子集。
4、根据另一实施方案,提供了一种对用于点云的点云数据进行编码的装置,该装置包括一个或多个处理器,其中所述一个或多个处理器被配置为:使用第一编码策略对第一数据集进行编码,其中所述第一数据集对应于所述点云数据的第一位级别子集;并且使用第二编码策略对第二数据集进行编码,其中所述第二数据集对应于所述点云数据的第二位级别子集。该装置可进一步被配置为使用第三编码策略对第三数据子集进行编码,其中所述第三数据集对应于所述点云数据的第三位级别子集。
5、一个或多个实施方案还提供了一种计算机程序,该计算机程序包括指令,该指令在由一个或多个处理器执行时使该一个或多个处理器执行根据上述任一实施方案中的编码方法或解码方法。本发明实施方案中的一个或多个实施方案还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有用于根据上述方法对点云数据进行编码或解码的指令。
6、一个或多个实施方案还提供了一种计算机可读存储介质,该计算机可读存储介质在其上存储有根据上述方法生成的视频数据。一个或多个实施方案还提供了一种用于传输或接收根据上述方法生成的视频数据的方法和装置。
技术特征:1.一种对用于点云的点云数据进行解码的方法,所述方法包括:
2.根据权利要求1所述的方法,其中所述第一数据集对应于所述点云的第一版本,并且其中所述第二数据集对应所述点云的第二版本,所述点云的所述第二版本比所述点云的所述第一版本更密集。
3.根据权利要求1或2所述的方法,其中所述第一位级别子集是位级别0至da–1,并且所述第二位级别子集是位级别da至db–1,其中位0表示最高有效位,da和db是整数,并且da<db。
4.根据权利要求3所述的方法,其中db等于d,其中d表示所述点云数据的总位深度,并且位d-1表示最低有效位。
5.根据权利要求1至4中任一项所述的方法,其中所述第一解码策略是无损解码策略。
6.根据权利要求1至5中任一项所述的方法,其中所述第二解码策略是基于体素的解码策略或基于点的解码策略。
7.根据权利要求6所述的方法,其中所述基于体素的解码策略包括:
8.根据权利要求1至7中任一项所述的方法,其中所述第一解码策略的输出用作所述第二解码策略的输入。
9.根据权利要求1至8中任一项所述的方法,所述方法进一步包括:
10.根据权利要求9所述的方法,其中所述第三数据集对应于所述点云的第三版本,所述点云数据的所述第三版本细化所述点云的所述第二版本的坐标的精度。
11.根据权利要求9或10所述的方法,所述方法进一步包括:
12.根据权利要求9至11中任一项所述的方法,其中所述第三位级别子集是位级别db至d-1,其中d表示所述点云数据的总位深度,并且位d-1表示最低有效位。
13.根据权利要求9至12中任一项所述的方法,其中所述第三解码策略是基于点的解码策略。
14.根据权利要求13所述的方法,其中所述基于点的解码策略包括:
15.根据权利要求14所述的方法,其中多层感知器(mlp)层或latentgan网络用于生成所述偏移坐标。
16.根据权利要求9至15中任一项所述的方法,其中所述第二解码策略的输出用作所述第三解码策略的输入。
17.根据权利要求3至16中任一项所述的方法,所述方法进一步对指示d、da和db中的一者或多者的值的信息进行解码。
18.根据权利要求1至17中任一项所述的方法,所述方法进一步包括:
19.一种对用于点云的点云数据进行编码的方法,所述方法包括:
20.根据权利要求19所述的方法,其中所述第一数据集对应于所述点云的第一版本,并且其中所述第二数据集对应所述点云的第二版本,所述点云的所述第二版本比所述点云的所述第一版本更密集。
21.根据权利要求19或20所述的方法,其中所述第一位级别子集是位级别0至da–1,并且所述第二位级别子集是位级别da至db–1,其中位0表示最高有效位,da和db是整数,并且da<db。
22.根据权利要求21所述的方法,其中da的值是基于位级别处的被占用体素的数量和配置参数中的至少一者来选择的。
23.根据权利要求21所述的方法,其中db等于d,其中d表示所述点云数据的总位深度,并且位d-1表示最低有效位。
24.根据权利要求20至23中任一项所述的方法,其中db的值是基于位级别处的体素密度增加比率或配置参数来选择的。
25.根据权利要求19至24中任一项所述的方法,其中所述第一编码策略是无损编码策略。
26.根据权利要求19至25中任一项所述的方法,其中所述第二编码策略是基于体素的编码策略。
27.根据权利要求26所述的方法,其中所述基于体素的编码策略包括:
28.根据权利要求19至27中任一项所述的方法,其中所述第二编码策略的输出用作所述第一编码策略的输入。
29.根据权利要求19至28中任一项所述的方法,所述方法进一步包括:
30.根据权利要求29所述的方法,其中所述第三数据集对应于所述点云的第三版本,所述点云的所述第三版本比所述点的所述第二版本具有更高的坐标精度。
31.根据权利要求29或30所述的方法,其中所述第三位级别子集是位级别db至d-1,其中d表示所述点云数据的总位深度,并且位d-1表示最低有效位。
32.根据权利要求29至31中任一项所述的方法,其中所述第三编码策略是基于点的编码策略。
33.根据权利要求32所述的方法,其中所述基于点的编码策略包括:
34.根据权利要求32或33所述的方法,其中多层感知器(mlp)层用于提取所述相应特征。
35.根据权利要求21至34中任一项所述的方法,所述方法进一步对指示d、da和db中的一者或多者的值的信息进行编码。
36.根据权利要求29至35中任一项所述的方法,其中所述第三编码策略的输出用作所述第二编码策略的输入。
37.一种装置,所述装置包括一个或多个处理器和耦接到所述一个或多个处理器的至少一个存储器,其中所述一个或多个处理器被配置为执行根据权利要求1至36中任一项所述的方法。
38.一种包括视频数据的信号,所述包括视频数据的信号通过执行根据权利要求19至36中任一项所述的方法形成。
39.一种计算机可读存储介质,所述计算机可读存储介质在其上存储有用于根据权利要求1至36中任一项所述的方法对点云进行编码或解码的指令。
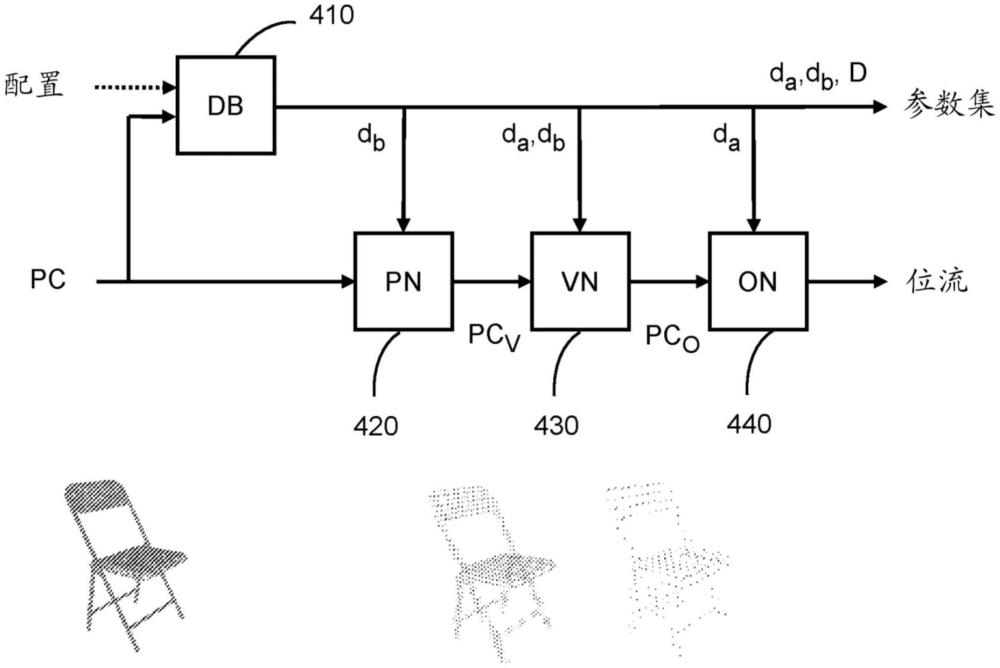
技术总结在一个具体实施中,我们提出了一种混合架构来压缩和解压缩点云。具体地,第一解码块用于最高有效位,通常通过基于树的编码方法进行编码。第二解码块用于位的中间范围,通常通过基于体素的方法进行编码。第三解码块用于最低有效位,通常通过基于点的方法进行编码。例如,解码器根据位的总数和位划分位置来配置该解码器的网络;使用基于树的解码块对粗略点云及其相关联的逐点特征进行解码;使用基于体素的解码块将该粗略点云上采样到更密集的点云,并且更新该逐点特征;并且使用基于点的解码块将密集但低位深度点云的坐标的精度细化到高位深度点云。技术研发人员:庞家昊,M·A·洛迪,田东受保护的技术使用者:交互数字VC控股公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240801/243733.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。