一种两相单极步进电机细分驱动电路及控制方法与流程
- 国知局
- 2024-08-02 15:59:09
本发明属于步进电机驱动电路,尤其是一种两相单极步进电机细分驱动电路及控制方法,实现了基于国产化器件的驱动架构设计。
背景技术:
1、当前的医疗诊断和生命科学仪器仪表的自动化程度较高,仪器内部使用步进电机的情况十分普遍;两相单极步进电机以其结构简单,成本低,输出扭矩高,运行速度快的特点,应用较为广泛。
2、另外,在诸如各种工业机床、打印机、印刷机等设备上也存在着广泛应用;这种步进电机的主要驱动芯片有日本三垦半导体公司的sla7078,东芝半导体公司的tb67s149,日清纺微电子公司的njw4351等;上述这些驱动芯片存在着驱动电流大小设定调整不灵活,电流细分功能有限的问题。
3、近些年,随着仪器产品自主可控需求的增加,在一些应用场合需要驱动电路采用全面国产化的芯片设计方案;目前由于没有相关功能的国产单芯片量产,导致无法实现两相单极步进电机细分驱动电路的全面国产化。
技术实现思路
1、为了解决上述技术问题,本发明提供一种两相单极步进电机细分驱动电路及控制方法,采用科学的架构单元模块设计,通过与国产化器件的结合,强化了驱动电路的电流细分和驱动电流大小设定功能,且调整灵活,在降低了驱动噪声,减小了机械振动的同时,拓宽了采购制造渠道,适合推广。
2、一种两相单极步进电机细分驱动电路及控制方法,其中:
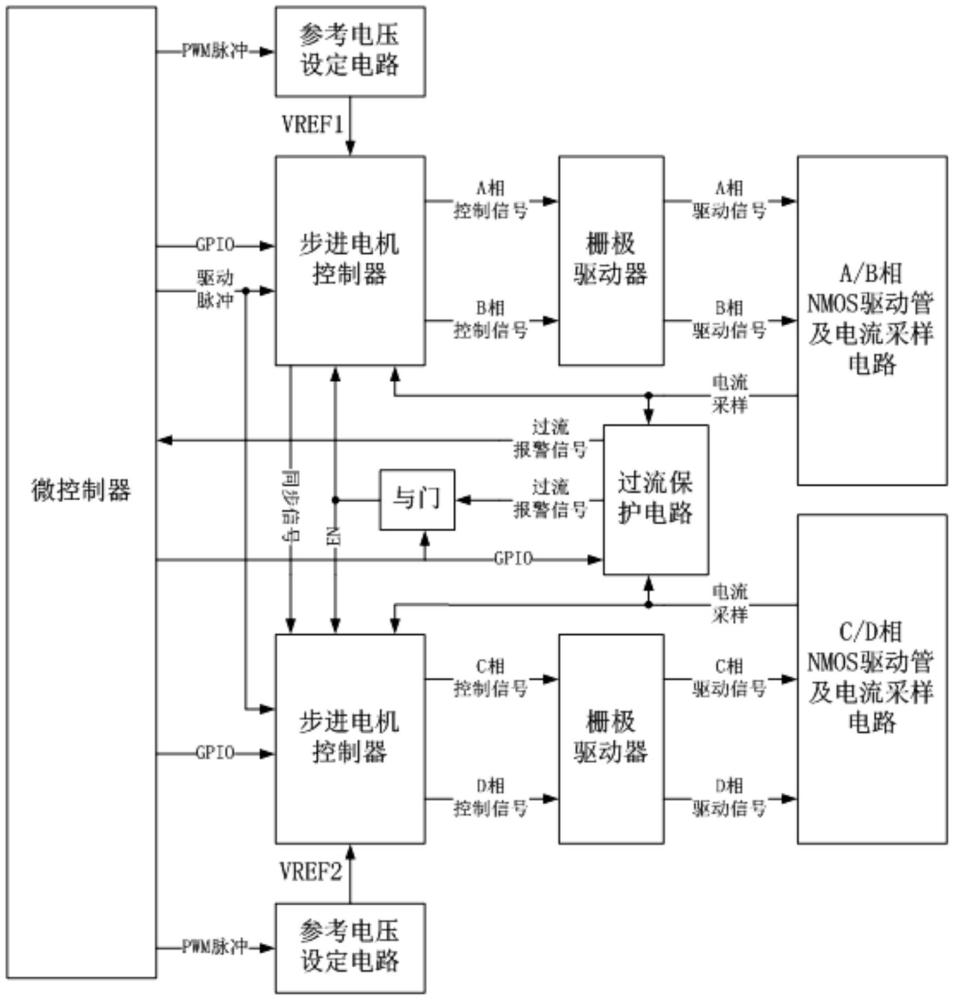
3、一种两相单极步进电机细分驱动电路,包括:微控制器、步进电机控制器、参考电压设定电路、栅极驱动器、与门、过流保护电路、nmos驱动管以及电流采样电路;
4、所述微控制器通过gpio(通用输入输出端口)对步进电机控制器的使能、复位、电机旋转方向和电机步进时序进行设定,除使能信号外,其余信号直接给入步进电机控制器;
5、所述微控制器对所述过流保护电路的d型触发器进行初始化,使d型触发器输出高电平,与微控制器输出的使能信号一并给入与门,允许与门输出高电平,使能步进电机控制器;
6、作为一种举例说明,所述步进电机控制器包括:a/b相步进电机控制器和c/d相步进电机控制器,a/b相步进电机控制器输出同步时钟信号给c/d相步进电机控制器,完成两个控制器之间的控制同步。
7、所述微控制器输出2路pwm信号,分别给入2路参考电压设定电路;参考电压设定电路依据pwm信号的占空比,生成参考电压给入2个步进电机控制器并产生相应的驱动电流,同时微控制器将驱动脉冲step信号给入2个步进电机控制器,进而生成a/b/c/d四相控制信号,经过栅极驱动器后,控制nmos管通断,进而驱动步进电机转动;
8、所述电流采样电路中,采样电阻r7和r32对电机线圈上的驱动电流进行检测,其上的电压经低通滤波,电压放大后,给入步进电机控制器用于精确控制电机驱动电流;同时也给入所述过流保护电路中的电压比较器u7和u9,并与设定的阈值电压比较后,给入d型触发器;
9、作为一种举例说明,所述过流保护电路的工作方式为:
10、①若采样电阻上检测到的电压超过设定的阈值电压:
11、则d型触发器输出低电平给入与门,将使能信号失效,关闭步进电机控制器;d型触发器的另一路报警输出给入微控制器,完成电机线圈过流报警上报;电机线圈过流报警后,微控制器需要复位d型触发器,否则,报警信号持续输出,关闭步进电机控制器;
12、②若采样电阻上检测到的电压没有超过设定的阈值电压,电路可以正常工作。
13、一种两相单极步进电机细分驱动电路的控制方法,包括:
14、步骤一、驱动电流设定过程包括:
15、①微控制器调用片上定时器,输出pwm信号;pwm信号通过参考电压设定电路后,生成的参考电压给入步进电机控制器并产生相应的电机驱动电流;
16、②参考电压设定电路为:二阶无源rc低通滤波电路,此电路滤除pwm信号频谱中的高频成分,保留基频成分,将pwm信号转换为平滑的模拟电压信号;通过调整pwm信号的占空比即高电平信号的时间,可以实现精确的电压数值控制,进而控制电机驱动电流;
17、③电机驱动电流的表达式如下:
18、
19、其中,idrv为电机驱动电流,vref为给入步进电机控制器的参考电压(vref1和vref2信号,如图2所示),rs为电流采样电阻的阻值(r7和r32),av为线圈电流采样放大电路的放大倍数;
20、作为一种举例说明,以a/b相为例,说明驱动电流的具体表达式;
21、微控制器输出的pwm_ab信号,经过二阶无源rc低通滤波电路,电压跟随器后,生成v_pwm_ab信号。该信号的电压可表示为:
22、vpwm_ab=k×vdd 公式2
23、其中,vpwm_ab为v_pwm_ab信号的电压,k为pwm_ab信号的占空比,vdd为微控制器的供电电压;
24、再根据电阻分压原理:
25、vref1为给入a/b相步进电机控制器的参考电压;
26、④运算放大器u3和电阻r8、r9组成同相比例放大电路,电流采样电阻r7上的电压(vr7)经rc低通滤波后,可表示为:
27、
28、其中,vsense_ab为经过放大后的采样电压;
29、根据公式2、3、4,电机驱动电流的表达式可写为:
30、
31、⑤由此,只要调整pwm信号的占空比,就可以实现对电机驱动电流的控制;
32、作为一种举例说明,所述电流采样电阻的功率参数应大于电机正常工作时该电阻上的最大瞬时功率。
33、步骤二、驱动电流细分;即让驱动电流跟随频率不断的改变,其设定实现过程包括:
34、①微控制器需要将步进电机控制器设定为双四拍模式;
35、②根据两相单极步进电机的控制时序,在单个驱动脉冲时间内,电机单相线圈驱动电流的变化次数即为电机驱动电流的细分数;
36、③因此,pwm脉冲占空比变化的频率、电机驱动电流的细分数和驱动脉冲的频率关系的可用下式表示:
37、fdcv=n×fdrv 公式6
38、其中,fdcv为pwm脉冲占空比变化的频率,n为电机驱动电流的细分数,fdrv为驱动脉冲的频率;
39、④通过公式6,再结合一种两相单极步进电机细分驱动电路的驱动电流设定过程,微控制器需要控制片内定时器,依据应用场合驱动电流细分数的要求,在单个驱动脉冲时间内,快速改变pwm脉冲的占空比用以改变电机驱动电流的大小,以达成电机驱动电流细分的效果;
40、⑤此时pwm脉冲占空比变化的频率即为电机步进脉冲的频率。
41、步骤三、电机线圈过流保护机制设计过程包括:
42、①为了确保过流保护机制正常工作,在驱动步进电机转动之前,微控制器需要对d型触发器进行初始化设定;drv_pre信号的默认状态为低电平,drv_rst信号的默认状态为高电平,此时d型触发器的q端输出高电平,端输出低电平;将drv_pre信号置高电平,drv_rst信号置低电平,d型触发器的q端输出低电平,端输出高电平;
43、由于端的oc_fb信号给入与门,所以步进电机控制器使能有效;这时,再将drv_rst信号置高电平,d型触发器的输出保持不变,依然是q端输出低电平,端输出高电平;至此,微控制器对d型触发器的初始化完毕;
44、此时由于没有驱动步进电机,电压比较器u7和u9的正输入端均为低电平,负输入端均为过流保护阈值电压,所以电压比较器输出为低电平,d型触发器的clk端输入为低电平。
45、②当采样电压信号sense_ab或sense_cd超过过流保护阈值电压时,电压比较器的正输入端电压大于负输入端电压,其输出将产生一个上升沿给入d型触发器的clk端;
46、又由于d型触发器的d端被置高电平,根据d触发器的逻辑功能,此时d型触发器的输出将发生翻转,q端输出高电平,端输出低电平,端的oc_fb信号给入与门,所以步进电机控制器使能失效,被关闭;q端的oc_err信号给入微控制器,用于报警;如果不复位d型触发器,此报警将保持;
47、③此时步进电机控制器已经被关闭,电压比较器u7和u9的正输入端电压再次回到低电平,负输入端电压将再次大于正输入端电压,这样电压比较器的输出回到低电平,d型触发器的clk端输入为低电平;这时,先将drv_rst信号置为低电平,然后再置为高电平,d触发器的输出被重新置位,q端输出低电平,端输出高电平。电路又可以正常工作。电压比较器u7和u9为开集电极输出,所以可以连在一起并上拉至5v输出。
48、本发明的有益效果:
49、1、整个细分驱动电路,所用的器件均为国产化器件,成本低廉,采购难度小,实现了设计的全面国产化。
50、2、强化了驱动电路的电流细分和驱动电流大小设定功能,且调整灵活。降低了驱动噪声,减小了机械振动。
51、3、电路具有一定的可扩展性,通过更换性能更优异的电路和器件,本电路可在更高的电压和更大的电流下驱动两相单极步进电机。
本文地址:https://www.jishuxx.com/zhuanli/20240801/248759.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表