一种仿生墨鱼型水下探测机器人
- 国知局
- 2024-08-02 16:02:30
本申请涉及水下仿生机器人,特别涉及一种仿生墨鱼型水下探测机器人。
背景技术:
1、水下探测器一般工作在深水层,用于探索未知的海洋环境,实现各种海洋信息的探测、收集。近年来,探测器朝着低能耗、体积小、外形仿生的趋势发展。例如设计新型集成式传感器以降低能耗,模仿海豹胡须的特殊结构以增加探测距离,采用无线电能传输技术的应用或光伏发电的设计等。然而已有的探测器普遍存在以下问题:(1)探测器外形奇特,容易受到海底生物的排斥和攻击,也不满足在水下行进的力学要求,行进阻力大,耗能大;(2)水下探测器常常使用电池作为主要的能量来源,包括锂电池、镍氢电池、锂离子电池等类型。但这种能量供给方式不仅电池质量重,体积大,限制探测器的机动性和操作灵活性,而且电池需要定期长时间充电或更换,限制探测器任务的执行时间,导致任务执行效率低。
2、近年来,国内外陆续公开了一些利用海洋能和动能的发电装置,用于满足水下探测器的能量供给。cn111355403a公开了一种水母状的压电摩擦电复合式海洋机械能收集器,其采用半球式摩擦俘能装置和带状柔性压电材料组成混合式发电装置,为收集器提供能量供给。cn116946335a是一种伞翼型自持水下航行器,具有运动和发电两种模式,但是其折展发电机构构造复杂,且不可在水下高效发电。cn113060262a提供了一种扑翼发电驱动一体的海洋机器人,该机器人只能通过波浪能发电为航行器提供能源,能量供给方式单一,且其扑翼波浪能能量转换效率较低,同时发电易受较大风浪影响。
3、可见,在现有技术中,水下探测机器人存在能量供给方式单一,发电效率相对较低,且部分无法实现自主运行的问题。
技术实现思路
1、本发明的目的是提供一种仿生墨鱼型水下探测机器人,以解决现有技术中水下探测机器人能量供给方式单一,发电效率相对较低的缺陷。
2、为达到以上目的,本说明书提出一种仿生墨鱼型水下探测机器人,所述水下探测机器人包括仿生“墨鱼”型本体结构,以及设置于所述仿生“墨鱼”型本体结构上的压电俘能装置、电路整流及储存模块和动力控制模块;
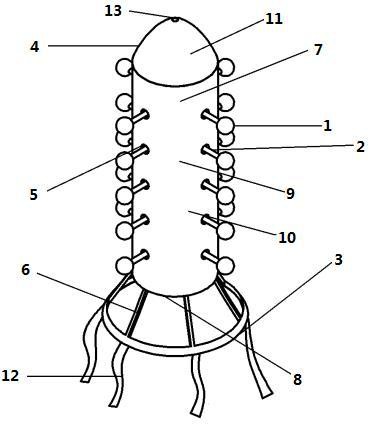
3、所述仿生“墨鱼”型本体结构包括头部和本体部;所述压电俘能装置包括多组压电陶瓷元件和多条pvdf压电薄膜,多组所述压电陶瓷元件以十字悬臂梁轴对称结构布设于本体部周身,且每个压电陶瓷元件的末端均连接一个球形扰流件,多条pvdf压电薄膜均布于本体部尾端;
4、所述电路整流及储存模块和所述动力控制模块均安装于所述本体部内部,所述电路整流及储存模块分别与多组所述压电陶瓷元件和多条所述pvdf压电薄膜电连接,用于将所述压电俘能装置获得的电能转换为稳定的直流电能并进行存储;所述动力控制模块与所述电路整流及储存模块电连接,用于通过所述电路整流及储存模块提供的电能对所述水下探测机器人进行动力控制。
5、上述本体部周身沿轴向均布有4组或6组压电陶瓷元件,每组压电陶瓷元件均包括5-6个间隔设置的压电陶瓷元件,所述压电陶瓷元件包括长条形压电陶瓷片和包覆长条形压电陶瓷片的柔性保护外壳,所述长条形压电陶瓷片的尺寸为0.18m×0.06m×0.012m。当所述水下探测机器人在水下游动和海洋流动时,所述压电陶瓷元件可多自由度接受各种海洋能以形变发电,其前端安装球形扰流件,可增大压电陶瓷元件的形变空间,提高发电量。上述pvdf压电薄膜共设置6-8条,长度为0.4m-0.5m,水流流过压电薄膜表面,薄膜随之振动进而形变发电。
6、上述本体部为双层圆筒状结构,其包括内层筒体和外层筒体,所述外层筒体上开设有多个插设孔,单个所述压电陶瓷元件通过插设孔插入后与内层筒体外壁固接。
7、上述动力控制模块包括设置于所述本体部内层筒体内部的运动控制芯片,以及本体部尾端的尾部推进器,所述运动控制芯片用于控制所述尾部推进器的速度和方向,以改变水下探测机器人的运动和转向。
8、上述仿生墨鱼型水下探测机器人还包括环形保护架,所述环形保护架包括第一环架、第二环架以及固连于所述第一环架和所述第二环架之间的多个金属连接杆;上述尾部推进器安装于上述本体部尾端,且位于所述第一环架内;所述第一环架的直径小于所述第二环架的直径,且所述第一环架与上述本体部外层筒体的下端面固定连接,所述环形保护架通过所述第一环架固连于上述本体部的尾部;上述多条pvdf压电薄膜均布于所述第二环架上。
9、上述金属连接杆为中空结构,上述pvdf压电薄膜通过设置于上述金属连接杆内的线路与上述电路整流及储存模块电连接。
10、上述电路整流及储存模块设置于上述本体部内层筒体内,其包括整流电路板、电能收集器及蓄电池;所述电能收集器用于将所述压电陶瓷元件和pvdf压电薄膜产生的电能进行集总,并将集总后的电能通过所述整流电路板转换为直流电能,以对所述蓄电池充电,进行电能存储。
11、本说明书提供的一种仿生墨鱼型水下探测机器人,与现有技术对比,能够达到以下有益效果:
12、本说明书提供的一种仿生墨鱼型水下探测机器人,采用带扰流件的多组压电陶瓷元件和多条pvdf压电薄膜组合发电,将波浪能、海流能转换为电能进而为探测机器人的动力控制模块进行供电,该发明采用的带扰流件的压电陶瓷元件形变空间大,发电效率高,且电流稳定,实现了水下探测机器人的自主运行。
技术特征:1.一种仿生墨鱼型水下探测机器人,其特征在于,所述水下探测机器人包括仿生“墨鱼”型本体结构,以及设置于所述仿生“墨鱼”型本体结构上的压电俘能装置、电路整流及储存模块(9)和动力控制模块(10);
2.如权利要求1所述的一种仿生墨鱼型水下探测机器人,其特征在于,
3.如权利要求1所述一种仿生墨鱼型水下探测机器人,其特征在于,所述压电陶瓷元件(2)包括长条形压电陶瓷片和包覆长条形压电陶瓷片的柔性保护外壳;
4.如权利要求1所述的一种仿生墨鱼型水下探测机器人,其特征在于,所述本体部(7)为双层圆筒状结构,其包括内层筒体(16)和外层筒体,所述外层筒体上开设有多个插设孔(5),单个所述压电陶瓷元件(2)通过插设孔(5)插入后与所述内层筒体(16)外壁固接。
5.如权利要求4所述的一种仿生墨鱼型水下探测机器人,其特征在于,所述动力控制模块(10)包括设置于所述本体部(7)的内层筒体(16)内部的运动控制芯片,以及本体部(7)尾端的尾部推进器(8),所述运动控制芯片用于控制所述尾部推进器(8)的速度和方向,以改变水下探测机器人的运动和转向。
6.如权利要求5所述的一种仿生墨鱼型水下探测机器人,其特征在于,还包括环形保护架(3),所述环形保护架(3)包括第一环架(19)、第二环架(14)以及固连于所述第一环架(19)和所述第二环架(14)之间的多个金属连接杆(6);
7.如权利要求6所述一种仿生墨鱼型水下探测机器人,其特征在于,所述金属连接杆(6)为中空结构,所述pvdf压电薄膜(12)通过设置于金属连接杆(6)内的线路与所述电路整流及储存模块(9)电连接。
8.如权利要求1所述一种仿生墨鱼型水下探测机器人,其特征在于,所述pvdf压电薄膜(12)共设置6-8条。
9.如权利要求1所述一种仿生墨鱼型水下探测机器人,其特征在于,所述pvdf压电薄膜(12)的长度为0.4m-0.5m。
10.如权利要求4所述的一种仿生墨鱼型水下探测机器人,其特征在于,所述电路整流及储存模块(9)设置于所述本体部(7)的内层筒体(16)内,其包括整流电路板、电能收集器及蓄电池;所述电能收集器用于将所述压电陶瓷元件(2)和所述pvdf压电薄膜(12)产生的电能进行集总,并将集总后的电能通过所述整流电路板转换为直流电能,以对所述蓄电池充电,进行电能存储。
技术总结本发明公开了一种仿生墨鱼型水下探测机器人,涉及仿生水下机器人技术领域。其包括仿生“墨鱼”型本体结构,以及设置于所述仿生“墨鱼”型本体结构上的压电俘能装置、电路整流及储存模块和动力控制模块;所述仿生“墨鱼”型本体结构包括头部和本体部;所述压电俘能装置包括多组压电陶瓷元件和多条PVDF压电薄膜,多组所述压电陶瓷元件布设于本体部周身,且每个压电陶瓷元件的末端均连接一个球形扰流件,多条PVDF压电薄膜均布于本体部尾端。本发明采用带扰流件的压电陶瓷元件和PVDF压电薄膜组合发电,将波浪能、海流能转换为电能进而为探测机器人的动力控制模块进行供电,其发电效率高,且电流稳定,实现了水下探测机器人的自主运行。技术研发人员:姜育竹,李保琦,国宪顺,韩飞,郑海青,张桐豪,石富,朱鹏昱,汤佳慧,吕昂岳受保护的技术使用者:石家庄铁道大学技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/249091.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。