一种三相爪极步进电机结构的制作方法
- 国知局
- 2024-08-02 16:14:55
本发明涉及爪极步进电机,尤其涉及一种三相爪极步进电机结构。
背景技术:
1、目前在电机领域中,使用二相爪极结构作为电机绕线电阻的结构是常规设置,而a\b两相在电周期中呈90°相位差摆放,在5对极的两相爪极步进电机中,一个电周期对应的机械角度为:72°。在一个电周期中如果不进行细分,一个步距角对应的机械角度为:18°(72/4)。在a、b两叠摆放时,在圆周方向上应错开18°(72/4)的机械角度;如已公开的专利201811340337.1就公开了一种卫星用微型混合式步进电机,通过转子爪极结构将轴向两极转换成为径向四极,减少磁钢用量,提高了磁钢安装的可靠性,同时弥补了径向两极磁性能对称中心精度不高的缺点,但是这样的结构在工作过程中相电流较大,容易产生较大的电流噪音,同时扭矩较小,也增加了运行噪音。因此,解决普通爪极步进电机运行时工作噪音较大的问题就显得尤为重要了。
技术实现思路
1、本发明的目的是提供一种三相爪极步进电机结构,通过对绕线结构和三相爪极的特殊相位差摆放设置,使常规的两相爪极步进电机变成相电流更小,电流噪音更小,同时在同等极对数的情况下步距角更小的三相爪极步进电机,电机同等情况下运行噪音更小,扭矩更大,解决了普通爪极步进电机运行时工作噪音较大的问题。
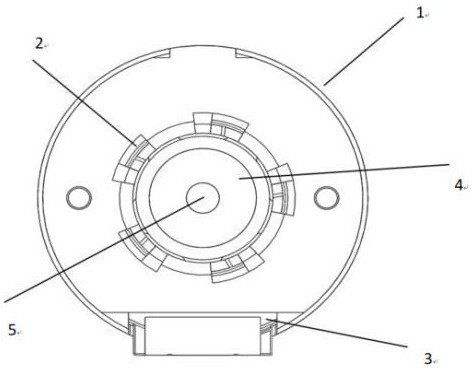
2、本发明提供一种三相爪极步进电机结构,包括外壳、磁芯转子、线圈骨架、转轴和爪极,所述线圈骨架设置在外壳内部,所述爪极设置在线圈骨架的内侧,所述磁芯转子设置在爪极内侧,转轴设置在磁芯的中心位置,所述爪极的u\v\w三相在电周期中呈120°相位差摆放,在五对极的三相爪极步进电机中,一个电周期对应的机械角度为72°。
3、进一步改进在于:所述绕线电阻的总匝数跟两相爪极电机保持一致的情况下,每项匝数是原来的三分之二。
4、进一步改进在于:所述绕线电阻为横向绕线,使整个绕线电阻相比两相爪极电机高度一致。
5、进一步改进在于:应用于n极的步进电机设计,一个电周期对应的机械角度为(360°/n),在u\v\w三叠摆放时,在圆周方向上应错开(360°/n/3)的机械角度。
6、进一步改进在于:在同等极对数的情况下三相爪极步进电机的步距角比两相爪极步进电机小,是两相爪极步进电机的三分之二。
7、本发明有益效果:通过对绕线结构和三相爪极的特殊相位差摆放设置,使三相爪极步进电机的相电流更小,电流噪音更小,同时在同等极对数的情况下三相爪极步进电机的步距角比两相爪极步进电机小,电机同等情况下运行噪音更小,扭矩更大,驱动电路方面,三相爪极步进电机相比两相爪极步进电机省掉一对mos管,降低电路成本,且驱动方式等效于三相无刷,此设计可以兼顾三相无刷电机foc的低运行噪音和步进电机运行的高位置精准度。
技术特征:1.一种三相爪极步进电机结构,包括外壳(1)、爪极(2)、线圈骨架(3)、磁芯转子(4)、转轴(5),所述线圈骨架(3)设置在外壳(1)内部,所述爪极(2)设置在线圈骨架(3)的内侧,所述磁芯转子(4)设置在爪极(2)内侧,转轴(5)设置在磁芯转子(4)的中心位置,其特征在于:所述爪极(2)的u\v\w三相在电周期中呈120°相位差摆放,在五对极的三相爪极步进电机中,一个电周期对应的机械角度为72°,在一个电周期中如果不进行细分,一个步距角对应的角度为:12°;在u\v\w三叠摆放时,在圆周方向上错开24°的机械角度。
2.如权利要求1所述的一种三相爪极步进电机结构,其特征在于:所述线圈骨架(3)上缠绕有绕线电阻,所述绕线电阻的总匝数跟两相爪极电机保持一致的情况下,每项匝数是原来的三分之二。
3.如权利要求1所述的一种三相爪极步进电机结构,其特征在于:所述绕线电阻为横向绕线,所述绕线电阻的总匝数跟两相爪极电机保持一致的情况下,整个绕线电阻相比两相爪极电机高度一致。
4.如权利要求1所述的一种三相爪极步进电机结构,其特征在于:应用于n极的步进电机设计,一个电周期对应的机械角度为360°/n,在u\v\w三叠摆放时,在圆周方向上应错开360°/n/3的机械角度。
5.如权利要求1所述的一种三相爪极步进电机结构,其特征在于:在同等极对数的情况下三相爪极步进电机的步距角比两相爪极步进电机小,是两相爪极步进电机的三分之二。
技术总结本发明提供一种三相爪极步进电机结构,包括外壳、爪极、线圈骨架、磁芯转子、转轴,线圈骨架设置在外壳内部,爪极设置在线圈骨架的内侧,磁芯转子设置在爪极内侧,转轴设置在磁芯的中心位置,爪极的U\V\W三相在电周期中呈120°相位差摆放。应用于N极的步进电机设计,一个电周期对应的机械角度为360°/N,在U\V\W三叠摆放时,在圆周方向上应错开360°/N/3的机械角度。绕线电阻的总匝数跟两相爪极电机保持一致的情况下,每项匝数是原来的三分之二。绕线电阻为横向绕线,使整个绕线电阻相比两相爪极电机高度一致。在同等极对数的情况下三相爪极步进电机的步距角比两相爪极步进电机小,是两相爪极步进电机的三分之二。技术研发人员:黄富军,林先奇,盛学生受保护的技术使用者:安徽通驰电子科技有限责任公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240801/250002.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表