一种基于铰接结构的无舵面三体飞行器
- 国知局
- 2024-08-02 12:32:56
本发明属于飞行设备,特别是涉及一种基于铰接结构的无舵面三体飞行器,适用于导弹、制导炮弹、制导火箭等飞行器。
背景技术:
1、以导弹为例,其是一种携带战斗部,依靠自身动力装置推进,由制导系统导引控制飞行航迹,导向目标并摧毁目标的飞行器。导弹实际上也是一种无人驾驶飞行器,能够自动引导,利用火箭或空气喷气发动机推进,能以最有利的速度和高度飞行,具有突防能力强、命中精度高、摧毁力强等优点。
2、传统导弹根据控制方式的不同,主要分为气动舵面控制方式和矢量推力控制方式。
3、针对采用气动舵面控制方式的导弹来说,通过转动舵面来实现飞行方向的控制,但这种控制方式存在机械结构复杂、响应速度较慢、受气动力影响大等问题。
4、针对采用矢量推力控制方式的导弹来说,通过调整喷口方向来改变推力矢量,用以实现导弹的飞行方向控制,但这种控制方式也存在明显缺点。当导弹处于失去推力或推力不足的状态时,推力矢量控制就无法发挥作用,也就无法对导弹进行有效的方向控制。
5、此外,传统导弹通常还想需要电池或发动机进行电力供应,进而会增加导弹的复杂性和重量,从而降低导弹的整体性能,导弹也易受外部其他干扰因素的影响,进而导致电力供应不稳定,造成导弹工作稳定性下降。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种基于铰接结构的无舵面三体飞行器,只需对飞行器的前后两个铰接点进行转角控制,即可实现飞行器的大过载机动,既保留了固定翼飞行器具有的航程远、航速快的特点,又降低了飞行器的方向控制难度,还有效增强了飞行器的姿态控制能力,同时可以实现电力供应的自主性和可靠性,避免对外部电源的依赖,节约飞行器机体内部空间,提高飞行器机体的紧凑性和飞行器控制系统的高效性。
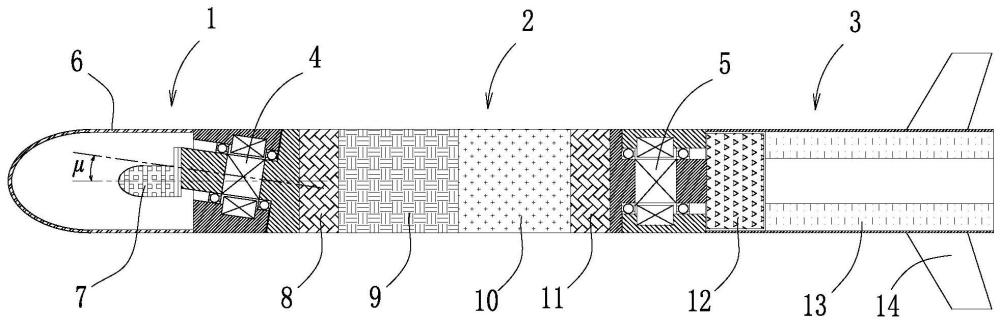
2、为了实现上述目的,本发明采用如下技术方案:一种基于铰接结构的无舵面三体飞行器,包括前机体、中间机体、后机体、前关节电机及后关节电机;所述前机体与中间机体通过前关节电机相铰接,中间机体与后机体通过后关节电机相铰接。
3、所述前机体包括整流罩和导引头,所述整流罩与前关节电机的外转子组件相连,所述导引头位于整流罩内部且安装在前关节电机的内定子组件上;所述中间机体包括前电机驱动器、主控系统、引战系统及后电机驱动器,所述前电机驱动器、主控系统、引战系统及后电机驱动器顺序设置在中间机体的外壳内部,所述前电机驱动器与前关节电机的内定子组件相连,所述后电机驱动器与后关节电机的内定子组件相连;所述后机体包括发动机点火与控制装置、推进系统及尾翼,所述发动机点火与控制装置及推进系统顺序设置在后机体的外壳内部,后机体的外壳与后关节电机的外转子组件相连,发动机点火与控制装置与后关节电机的内定子组件相连,所述推进系统与后机体的外壳相连,所述尾翼安装在后机体的外壳末端外部。
4、所述前关节电机的中轴线与中间机体的中轴线具有夹角,该夹角为前关节电机的安装角,该安装角记为μ。
5、所述前机体的中轴线与中间机体的中轴线具有夹角,该夹角为前机体相对于中间机体的弯角,该弯角可调且记为δ,弯角δ的范围为0~2μ。
6、所述前机体相对于中间机体的弯角δ通过前关节电机进行调节,通过改变弯角δ用以产生气动力矩。
7、所述后机体的外壳相对于中间机体可回转,后机体外壳回转动作通过后关节电机进行控制,通过调节后机体外壳的回转速度,用以产生动量守恒力矩、陀螺效应和马格努斯效应力矩。
8、所述尾翼相对于后机体的外壳具有安装角,尾翼在作用上相当于风力叶片,尾翼在气流驱动下带动后机体的外壳做回转运动。
9、所述尾翼的数量至少为两个,多个尾翼沿后机体外壳圆周方向均匀分布。
10、所述后机体的外壳在做回转运动时带动后关节电机的外转子组件转动,此时后关节电机在作用上相当于发电机,通过后关节电机为飞行器内部用电部件供电。
11、本发明的有益效果:
12、本发明的基于铰接结构的无舵面三体飞行器,只需对飞行器的前后两个铰接点进行转角控制,即可实现飞行器的大过载机动,既保留了固定翼飞行器具有的航程远、航速快的特点,又降低了飞行器的方向控制难度,还有效增强了飞行器的姿态控制能力,同时可以实现电力供应的自主性和可靠性,避免对外部电源的依赖,节约飞行器机体内部空间,提高飞行器机体的紧凑性和飞行器控制系统的高效性。
技术特征:1.一种基于铰接结构的无舵面三体飞行器,其特征在于:包括前机体、中间机体、后机体、前关节电机及后关节电机;所述前机体与中间机体通过前关节电机相铰接,中间机体与后机体通过后关节电机相铰接。
2.根据权利要求1所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述前机体包括整流罩和导引头,所述整流罩与前关节电机的外转子组件相连,所述导引头位于整流罩内部且安装在前关节电机的内定子组件上;所述中间机体包括前电机驱动器、主控系统、引战系统及后电机驱动器,所述前电机驱动器、主控系统、引战系统及后电机驱动器顺序设置在中间机体的外壳内部,所述前电机驱动器与前关节电机的内定子组件相连,所述后电机驱动器与后关节电机的内定子组件相连;所述后机体包括发动机点火与控制装置、推进系统及尾翼,所述发动机点火与控制装置及推进系统顺序设置在后机体的外壳内部,后机体的外壳与后关节电机的外转子组件相连,发动机点火与控制装置与后关节电机的内定子组件相连,所述推进系统与后机体的外壳相连,所述尾翼安装在后机体的外壳末端外部。
3.根据权利要求2所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述前关节电机的中轴线与中间机体的中轴线具有夹角,该夹角为前关节电机的安装角,该安装角记为μ。
4.根据权利要求3所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述前机体的中轴线与中间机体的中轴线具有夹角,该夹角为前机体相对于中间机体的弯角,该弯角可调且记为δ,弯角δ的范围为0~2μ。
5.根据权利要求4所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述前机体相对于中间机体的弯角δ通过前关节电机进行调节,通过改变弯角δ用以产生气动力矩。
6.根据权利要求1所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述后机体的外壳相对于中间机体可回转,后机体外壳回转动作通过后关节电机进行控制,通过调节后机体外壳的回转速度,用以产生动量守恒力矩、陀螺效应和马格努斯效应力矩。
7.根据权利要求2所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述尾翼相对于后机体的外壳具有安装角,尾翼在作用上相当于风力叶片,尾翼在气流驱动下带动后机体的外壳做回转运动。
8.根据权利要求2所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述尾翼的数量至少为两个,多个尾翼沿后机体外壳圆周方向均匀分布。
9.根据权利要求1所述的一种基于铰接结构的无舵面三体飞行器,其特征在于:所述后机体的外壳在做回转运动时带动后关节电机的外转子组件转动,此时后关节电机在作用上相当于发电机,通过后关节电机为飞行器内部用电部件供电。
技术总结一种基于铰接结构的无舵面三体飞行器,属于飞行设备技术领域,适用于导弹、制导炮弹、制导火箭等飞行器,包括前机体、中间机体、后机体、前关节电机及后关节电机;前机体与中间机体通过前关节电机相铰接,中间机体与后机体通过后关节电机相铰接。本发明的基于铰接结构的无舵面三体飞行器,只需对飞行器的前后两个铰接点进行转角控制,即可实现飞行器的大过载机动,既保留了固定翼飞行器具有的航程远、航速快的特点,又降低了飞行器的方向控制难度,还有效增强了飞行器的姿态控制能力,同时可以实现电力供应的自主性和可靠性,避免对外部电源的依赖,节约飞行器机体内部空间,提高飞行器机体的紧凑性和飞行器控制系统的高效性。技术研发人员:徐光延,林志文受保护的技术使用者:沈阳航空航天大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240802/236637.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。