基于人机交互的射击模拟训练系统的制作方法
- 国知局
- 2024-08-02 12:33:26
本发明涉及射击模拟训练,具体为基于人机交互的射击模拟训练系统。
背景技术:
1、随着军事和警察力量的现代化发展,射击训练在提高作战效能和应对突发情况中扮演着至关重要的角色。传统的射击训练主要依赖于实际射击场地和靶场,存在许多不足之处。
2、首先,实际射击场地的资源有限,不易建造多样化的训练场景,难以模拟复杂的作战环境。其次,靶场的布置和环境因素受限,无法真实模拟实战情况下的复杂环境影响,如光线、噪音、地形等。此外,传统的射击训练过程缺乏实时的数据收集和分析,无法对训练者的操作行为和安全状况进行全面监测和评估。特别是在模拟训练过程中,训练者的防护安全情况无法有效预警,这可能导致意外事件的发生,给训练者和其他人员带来安全隐患。
技术实现思路
1、针对现有技术的不足,本发明提供了基于人机交互的射击模拟训练系统,以解决背景技术中提到的问题。
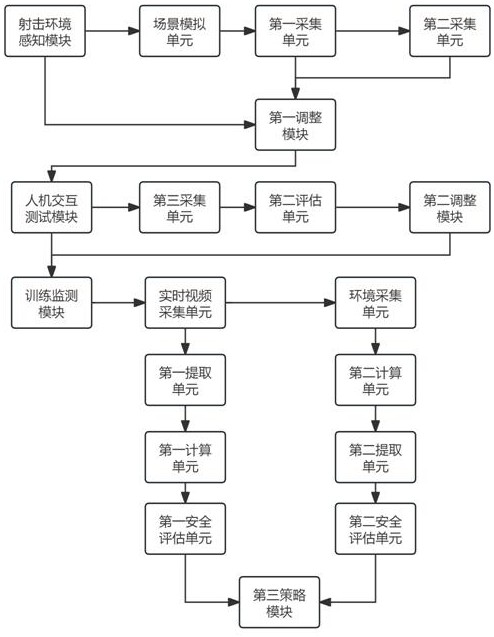
2、为实现以上目的,本发明通过以下技术方案予以实现:基于人机交互的射击模拟训练系统,包括射击环境感知模块、第一调整模块、人机交互测试模块、第二调整模块、训练监测模块和第三策略模块;
3、所述射击环境感知模块将模拟训练场设置若干个子区域,并采集子区域内的遮挡物体、静态膜靶以及移动目标点位信息,构建每个子区域的障碍分布指数zaf,根据分析结果,创建障碍训练分布图;并采集子区域内静态膜靶以及移动目标点位信息的安全距离以及防护措施信息,构建防护干扰指数fhg,若防护干扰指数fhg低于预设第一防护阈值,则向外部发送第一报警指令;
4、所述第一调整模块,用于接收第一报警指令后,对相对应的子区域进行隔离后,生成第一安全策略;
5、在第一安全策略执行后,所述人机交互测试模块用于,采集每个训练者佩戴的人机交互设备的测试性能数据,构建每个训练者的配备完整指数wzz,若配备完整指数wzz高于第二防护阈值,则进行下一步射击模拟训练,若配备完整指数wzz低于或等于第二防护阈值,则通过第二调整模块生成第二安全策略;
6、所述训练监测模块,用于在子区域内安装高清摄像头和传感器,采集训练者在子区域内的实时训练视频以及环境条件数据,建立安全预测训练模型,提取实战训练视频中训练者因操作不当引发误射、碰撞特征以及突发紧急情况特征,并提取环境条件数据中的光线强度、噪音干扰以及地面颠簸度,计算获得:第一安全指数dy1和第二安全指数dy2;并将第一安全指数dy1和第二安全指数dy2进行评估,获得第一评估结果和第二评估结果;由第三策略模块根据第一评估结果和第二评估结果生成相对应的策略。
7、优选的,所述射击环境感知模块包括场景模拟单元、第一采集单元和第二采集单元;
8、所述场景模拟单元用于使用ar技术将虚拟场景叠加在真实环境中,在模拟训练场子区域内,模拟不同的训练场景,包括城市街道以及丛林地带;
9、所述第一采集单元用于模拟训练场设置若干个子区域,并采集子区域内的遮挡物体、静态膜靶以及移动目标点位信息,建立分布数据集,并依据分布数据集计算获得:障碍分布指数zaf,并创建障碍训练分布图;
10、第二采集单元用于采集子区域内静态膜靶以及移动目标点位信息的安全距离以及防护措施信息,建立防护数据集,并依据防护数据集计算获得:防护干扰指数fhg。
11、优选的,所述障碍分布指数zaf通过以下公式生成:
12、
13、式中,oi表示第i个遮挡物体的位置和大小,sj表示第j个静态膜靶的位置和大小,mk表示第k个移动目标的位置和轨迹,表示第i个遮挡物体与第j个静态膜靶之间的距离;表示第i个遮挡物与第k个移动目标之间的距离;no表示遮挡物体的数量,ns表示静态膜靶的数量,nm表示移动目标的数量,公式的含义表示的是子区域内所有遮挡物体与静态膜靶及移动目标之间距离的倒数和的平均值,距离越短,障碍分布指数越高,表示障碍密度越大,训练难度越高。
14、优选的,所述防护干扰指数fhg通过以下公式生成:
15、,
16、式中,dsafe表示预设安全距离,表示第j个静态膜靶与第i个防护设施之间的距离,表示第k个移动目标与第i个防护设施之间的距离,ns表示静态膜靶的数量,nm表示移动目标的数量,nf表示防护设施的数量,表示第i个防护设施的有效性权重;
17、所述射击环境感知模块还包括第一判断单元,所述第一判断单元用于将所述防护干扰指数fhg与第一防护阈值进行对比,获得判断结果,包括:
18、若防护干扰指数fhg低于第一防护阈值,表示防护不合格,触发预警机制,发送第一报警指令;
19、若防护干扰指数fhg高于或等于第一防护阈值,则表示属于绿区,防护合格,无需特殊处理,继续正常训练;
20、所述第一调整模块,用于接收第一报警指令后,对相对应的子区域进行隔离后,生成第一安全策略,包括:
21、使用可移动的隔离墙将存在安全隐患的子区域隔离开,防止其他训练者误入,并在障碍训练分布图中标记并禁用该子区域;对子区域进行安全检查,调整子区域的遮挡物体,静态膜靶和移动目标位置,增加30%防护设施与静态膜靶和移动目标位置的距离。
22、优选的,所述人机交互测试模块包括第三采集单元和第二评估单元;
23、所述第三采集单元用于监测每个训练者佩戴的人机交互设备的数据,包括触觉反馈设备、后座力模拟设备和声音效果设备的工作状态和性能,建立响应数据集;
24、并依据第三采集单元采集的响应数据集进行预处理后,由以下公式计算获取每个训练者的配备完整指数wzz:,
25、式中,pi是第i个设备的性能评分,bi是第i个设备的电量百分比,ci是第i个设备的校准评分,wi是第i个设备的校准得分;pmax为设备性能的最大得分,bmax为设备电量的最大百分比,cmax为设备校准的最大得分;
26、所述第二评估单元用于将每个训练者的配备完整指数wzz进行评估,获得分析结果,包括:
27、若配备完整指数wzz高于第二防护阈值,表示配备完整指数wzz合格,则进行下一步射击模拟训练;
28、若配备完整指数wzz低于或等于第二防护阈值,表示配备完整指数wzz不合格,设备配置不完整或性能不足,则通过第二调整模块生成第二安全策略,包括:给触觉反馈设备、后座力模拟设备和声音效果设备的电池充电、并更新设备固件和调整设备校准,并制定每日的清洁设备维护计划。
29、优选的,所述训练监测模块包括实时视频采集单元和环境采集单元;
30、所述实时视频采集单元用于在子区域内安装若干个高清摄像头,采集训练者在子区域内的实时训练视频并存储,建立实时视频数据集;
31、所述环境采集单元用于在子区域内安装气象传感器,采集子区域内的环境条件数据;
32、所述环境条件数据包括但不限于以下数据:光线强度gxqd、噪音值zyz、地面湿滑值shz和地面加速度值js;
33、所述光线强度gxqd通过光线传感器测量获取;所述噪音值zyz通过噪声传感器测量获取;所述地面湿滑值shz通过湿度传感器测量获取;所述地面加速度值js通过地面上案子加速度传感器测量获取。
34、优选的,所述训练监测模块还包括第一提取单元和第一计算单元;
35、所述第一提取单元用于从实时视频数据集中采集训练者在子区域内的实时训练视频,对实时视频进行预处理,包括去除噪声、调整亮度和对比度后,利用计算机视觉技术对训练者进行行为识别和跟踪,通过训练深度学习模型,识别训练者的动作,包括持枪、瞄准和射击动作,并跟踪其在视频中的位置和运动轨迹;
36、并将实时训练视频中发生的碰撞时间,分析视频中物体的运动轨迹和相互之间的接触情况,识别碰撞特征;
37、识别实时训练视频中异常事件,包括训练者突然倒地和迅速逃离出口的特征;
38、所述第一计算单元用于建立安全预测训练模型,将提取的特征进行融合,并用于训练安全预测训练模型,使用机器学习和深度学习算法训练模型,从而预测训练者因操作不当引发的误射、碰撞特征以及突发紧急情况特征,进而通过以下公式计算获得第一安全指数dy1:,
39、式中,f1为误射特征,表示训练者在训练过程中发生的误射频率;f2为碰撞特征,表示训练者在训练过程中发生的碰撞或摔倒频率;f3为突发情况特征,表示训练者在训练过程中发生的突发情况频率;log表示为对数函数,e表示sigmoid函数,w1、w2和w3为权重值,w1+w2+w3=1.0。
40、优选的,所述训练监测模块还包括第二提取单元和第二计算单元;
41、所述第二提取单元用于将提取环境条件数据中的光线强度gxqd、噪音值zyz、地面湿滑值shz和地面加速度值js,并进行无量纲处理;
42、并依据地面加速度值js计算获取地面颠簸度dbd:
43、
44、式中,jsi是第i个时间点的地面加速度值,是所有加速度数据值的平均值,ti是相邻时间点的时间间隔,n是时间点的总数;
45、所述第二计算单元用于依据光线强度gxqd、噪音值zyz、地面湿滑值shz和地面颠簸度dbd,通过以下公式计算获得第二安全指数dy2:,
46、式中,gmax为光线强度标准阈值,zmax表示噪音最大承受阈值,smax表示地面是花都最大允许值,dmax表示地面颠簸度最大允许值。
47、优选的,所述训练监测模块包括第一安全评估单元和第二安全评估单元;
48、所述第一安全评估单元用于将第一安全指数dy1与第一安全阈值进行对比,获得第一评估结果,包括:若第一安全指数dy1高于第一安全阈值,表示训练者操作异常,存在安全风险,生成第一不合格标志;
49、若第一安全指数dy1低于或等于第一安全阈值,表示训练者操作表现合格,不存在安全风险;
50、所述第二安全评估单元用于将第二安全指数dy2与第二安全阈值进行对比,获得第二评估结果,包括:
51、若第二安全指数dy2高于第二安全阈值,表示子区域中训练环境异常,存在安全风险,生成第二不合格标志;
52、若第二安全指数dy2低于或等于第二安全阈值,表示子区域中训练环境异常,不存在安全风险。
53、优选的,所述第三策略模块根据第一评估结果中第一不合格标志,生成第一安全策略,包括:暂停训练、并提供指导操作规范,对训练者进行节能水平重新评估后,技能合格后方可重新训练;
54、并根据第二评估结果中第二不合格标志,生成第二安全策略,包括:若光线强度不足,增加30%的光源照明,提供减噪耳机给训练者,并采取措施清理地面,铺设防滑材料以及修正地面凹陷位置。
55、本发明提供了基于人机交互的射击模拟训练系统。具备以下有益效果:
56、(1)该基于人机交互的射击模拟训练系统,射击环境感知模块负责采集真实训练场子区域内的遮挡物体、静态膜靶和移动目标点位信息,以构建障碍分布指数zaf和防护干扰指数fhg。第一调整模块根据这些信息生成第一安全策略,并在必要时对子区域进行隔离。
57、随后,人机交互测试模块评估训练者佩戴的人机交互设备的性能,根据配备完整指数wzz决定是否进行下一步射击模拟训练,或者生成第二安全策略。训练监测模块在真实环境内安装摄像头和传感器,采集实时训练视频和环境条件数据,并建立安全预测训练模型。这个模型根据训练视频和环境数据提取训练者的操作特征和环境条件,计算得出第一安全指数和第二安全指数,评估训练的安全情况。最后,第三策略模块根据第一评估结果和第二评估结果生成相应的策略,以确保训练的安全性。整个系统通过结合虚拟和真实场景,提供了更真实、更有效的射击训练体验。
58、(2)该基于人机交互的射击模拟训练系统,通过实时监测和评估训练者配备的人机交互设备的状态和性能,可以及时发现设备配置不完整或性能不足的情况,并采取相应的维护和调整措施,确保设备的正常运行和维护,从而提高了训练的顺利进行和效果。通过对训练者配备的人机交互设备进行实时监测和评估,可以及时发现和解决设备方面的问题,确保训练过程的顺利进行,提高射击训练的效果和安全性。
59、(3)该基于人机交互的射击模拟训练系统,通过实时视频采集单元,系统能够实时监测训练者在子区域内的训练过程,并通过第一提取单元对视频进行预处理和特征提取,包括行为识别、动作跟踪和异常事件检测,从而建立实时视频数据集,为安全预测模型提供数据支持。环境采集单元负责采集子区域内的环境条件数据,如光线强度、噪音、地面湿滑度和地面颠簸度等,并经过第二提取单元处理后,结合第二计算单元,计算出第二安全指数dy2。这些数据的综合分析有助于评估训练环境的安全性。第一计算单元利用提取的视频特征和环境条件数据,建立安全预测训练模型。通过机器学习和深度学习算法训练模型,预测训练者因操作不当引发的误射、碰撞和突发紧急情况,进而计算获得第一安全指数dy1,为安全性评估提供重要依据。第一安全评估单元和第二安全评估单元根据第一安全指数dy1和第二安全指数dy2与相应阈值的对比,分别生成第一评估结果和第二评估结果。若存在安全风险,则生成不合格标志,及时提醒相关人员采取必要措施。
本文地址:https://www.jishuxx.com/zhuanli/20240802/236672.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。