一种用于船端与岸基的多源异构数据传输方法与流程
- 国知局
- 2024-08-02 12:45:54
本发明涉及数据传输,具体涉及一种用于船端与岸基的多源异构数据传输方法。
背景技术:
1、船舶在运输过程中存在明显的优势,其运输的成本低廉同时运输的距离远、运输量较大的优势被大力的发展。在进行船舶运输时为了保证船舶在行驶过程中的安全和对应的岸基于多个船端的路径的规划情况,往往需要对船舶信息进行远程监测。在进行监测时往往需要将船端获取的多源数据传输到岸基中进行规划和安全监测。其中,多源数据,又称多源异构数据,可以由多种维度数据构成。对数据进行传输时,往往需要为数据设置传输优先级,比如,异常数据的传输优先级往往高于正常数据。目前,对数据进行异常检测时,通常采用的方法为:基于密度分析,对数据进行异常检测,其认为异常数据往往远离密度大的群体,即认为密度分布越低离群程度越高时数据越异常。
2、然而,在对用于船端与岸基的多源数据进行传输的过程中,当基于本次航行采集的多源数据进行密度分析,实现对本次航行采集的多源数据的异常检测,以判断船舶是否偏航时,经常会存在如下技术问题:
3、若本次航行时大多路线已经偏航,则此时可能会将表征正常航行的多源数据误判为异常数据,而将表征偏航异常的多源数据误判为正常数据,从而可能导致传输优先级设置的合理性较差,进而可能导致表征偏航异常的多源数据晚于表征正常航行的多源数据传输,从而导致对用于船端与岸基的多源数据进行传输顺序设置的合理性较差。
技术实现思路
1、为了解决由于多源数据异常检测的准确度较差而导致的对用于船端与岸基的多源数据进行传输顺序设置的合理性较差的技术问题,本发明提出了一种用于船端与岸基的多源异构数据传输方法。
2、本发明提供了一种用于船端与岸基的多源异构数据传输方法,该方法包括:
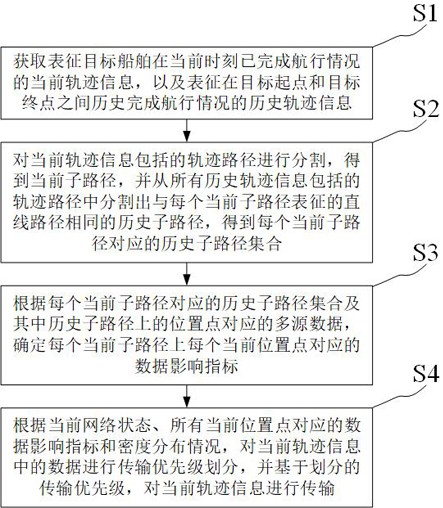
3、获取表征目标船舶在当前时刻已完成航行情况的当前轨迹信息,以及表征在目标起点和目标终点之间历史完成航行情况的历史轨迹信息,其中,目标起点和目标终点分别表示所述目标船舶需完成的航行过程的起点和终点,轨迹信息包括轨迹路径和轨迹路径上每个位置点对应的多源数据;
4、对所述当前轨迹信息包括的轨迹路径进行分割,得到当前子路径,并从所有历史轨迹信息包括的轨迹路径中分割出与每个当前子路径表征的直线路径相同的历史子路径,得到每个当前子路径对应的历史子路径集合;
5、根据每个当前子路径对应的历史子路径集合及其中历史子路径上的位置点对应的多源数据,确定每个当前子路径上每个当前位置点对应的数据影响指标;
6、根据当前网络状态、所有当前位置点对应的数据影响指标和密度分布情况,对所述当前轨迹信息中的数据进行传输优先级划分,并基于划分的传输优先级,对所述当前轨迹信息进行传输。
7、可选地,所述对所述当前轨迹信息包括的轨迹路径进行分割,得到当前子路径,包括:
8、连接所述目标起点和所述目标终点,得到表征所述目标船舶需完成航行直线路径的目标直线;
9、将所述当前轨迹信息包括的轨迹路径确定为当前轨迹路径,并对所述当前轨迹路径在所述目标直线上的垂直投影进行等分,得到当前子线段,其中,当前子线段表征直线路径;
10、从所述当前轨迹路径中分割出在所述目标直线上的垂直投影为每个当前子线段的子路径,作为当前子路径。
11、可选地,所述根据每个当前子路径对应的历史子路径集合及其中历史子路径上的位置点对应的多源数据,确定每个当前子路径上每个当前位置点对应的数据影响指标,包括:
12、从每个当前位置点所属当前子路径对应的历史子路径集合中的每个历史子路径上分割出偏离路径段,得到每个当前位置点对应的偏离路径段集合;
13、根据每个当前位置点及其对应的偏离路径段集合中的所有位置点,确定每个当前位置点对应的位置偏航可能指标;
14、根据每个当前位置点及其对应的偏离路径段集合中的所有位置点对应的多源数据,确定每个当前位置点对应的多源维度偏差;
15、根据每个当前位置点对应的多源维度偏差和位置偏航可能指标之间的差异,确定每个当前位置点对应的数据影响指标,其中,多源维度偏差和位置偏航可能指标之间的差异与数据影响指标呈正相关。
16、可选地,所述从每个当前位置点所属当前子路径对应的历史子路径集合中的每个历史子路径上分割出偏离路径段,得到每个当前位置点对应的偏离路径段集合,包括:
17、将任意一个当前位置点确定为标记位置点,并将所述标记位置点所属当前子路径对应的历史子路径集合中的任意一个历史子路径,确定为匹配子路径;
18、从所述匹配子路径上筛选出离所述标记位置点最近的位置点,作为第一参考位置点;
19、连接所述目标起点和所述目标终点,得到表征所述目标船舶需完成航行直线路径的目标直线,并将所述标记位置点在所述目标直线上的垂直投影点,确定为标记投影点;
20、连接所述标记位置点和所述标记投影点,作为标记直线,并将所述标记直线与所述匹配子路径的交点,确定为第二参考位置点;
21、将所述匹配子路径上第一参考位置点和第二参考位置点之间的路段,确定为所述标记位置点在所述匹配子路径上的偏离路径段;
22、将所述标记位置点在其所属当前子路径对应的历史子路径集合中的所有历史子路径上的偏离路径段,构成所述标记位置点对应的偏离路径段集合。
23、可选地,所述根据每个当前位置点及其对应的偏离路径段集合中的所有位置点,确定每个当前位置点对应的位置偏航可能指标,包括:
24、将任意一个当前位置点确定为标记位置点,并将所述标记位置点对应的偏离路径段集合中的任意一个位置点确定为偏离可能点;
25、将所述标记位置点对应的多源数据包括的船头方向与所述偏离可能点对应的多源数据包括的船头方向之间的夹角,确定为所述标记位置点与所述偏离可能点之间的位置偏离夹角;
26、根据所述标记位置点与所述偏离可能点之间的距离和位置偏离夹角,确定所述标记位置点与所述偏离可能点之间的初始偏离因子,其中,距离和位置偏离夹角均与初始偏离因子呈正相关;
27、根据所述标记位置点与其对应的偏离路径段集合中所有位置点之间的初始偏离因子,确定所述标记位置点对应的位置偏航可能指标,其中,初始偏离因子与位置偏航可能指标呈正相关。
28、可选地,所述根据每个当前位置点及其对应的偏离路径段集合中的所有位置点对应的多源数据,确定每个当前位置点对应的多源维度偏差,包括:
29、对每个轨迹路径上所有位置点对应的多源数据中的同一种预设维度下的维度数据进行曲线拟合,得到每个轨迹路径在该种预设维度下的数据变化曲线;
30、将每个位置点对应的多源数据中每种预设维度下的维度数据在其所属数据变化曲线上的倾斜角,确定为每个位置点在每种预设维度下的目标倾角;
31、将任意一个当前位置点确定为标记位置点,并将所述标记位置点对应的偏离路径段集合中的任意一个位置点确定为偏离可能点;
32、将第一夹角与所述标记位置点在每种预设维度下的目标倾角之间的差异,确定为所述标记位置点在每种预设维度下的角度偏离指标,其中,所述第一夹角是所述标记位置点与所述偏离可能点之间的位置偏离夹角;
33、将所述标记位置点和所述偏离可能点在同一种预设维度下的维度数据之间的差异,确定为所述标记位置点和所述偏离可能点在该种预设维度下的维度偏离因子;
34、根据所述标记位置点和其对应的偏离路径段集合中所有位置点在各种预设维度下的维度偏离因子,以及所述标记位置点在各种预设维度下的角度偏离指标,确定所述标记位置点对应的多源维度偏差。
35、可选地,所述根据当前网络状态、所有当前位置点对应的数据影响指标和密度分布情况,对所述当前轨迹信息中的数据进行传输优先级划分,包括:
36、根据当前网络状态、每个当前位置点对应的数据影响指标和密度分布情况,确定每个当前位置点对应的半径保留因子;
37、根据每个当前位置点对应的半径保留因子,对预设邻域半径进行修正,得到每个当前位置点对应的目标邻域半径;
38、根据所有当前位置点对应的目标邻域半径,通过dbscan算法,对所有当前位置点进行划分,得到噪声点、边界点和核心点;
39、为噪声点设置最高的传输优先级、为核心点设置最低的传输优先级,并为边界点设置位于中间的传输优先级。
40、可选地,所述根据当前网络状态、每个当前位置点对应的数据影响指标和密度分布情况,确定每个当前位置点对应的半径保留因子,包括:
41、根据获取的当前时刻下待传输网络需要传输的数据量和当前单位时间内允许传输的数据量,确定表征当前网络状态的当前网络因子;
42、根据每个当前位置点与其前一个当前位置点对应的数据影响指标,以及每个当前位置点所属当前子路径对应的历史子路径集合中所有位置点对应的数据影响指标,确定每个当前位置点对应的位置正常因子;
43、根据所述当前网络因子、每个当前位置点对应的局部可达密度和位置正常因子,确定每个当前位置点对应的半径保留因子,其中,当前网络因子、局部可达密度和位置正常因子均与半径保留因子呈正相关,局部可达密度表征当前位置点周围的密度分布情况。
44、可选地,所述根据每个当前位置点与其前一个当前位置点对应的数据影响指标,以及每个当前位置点所属当前子路径对应的历史子路径集合中所有位置点对应的数据影响指标,确定每个当前位置点对应的位置正常因子,包括:
45、将任意一个当前位置点确定为标记位置点,并将所述标记位置点所属当前子路径对应的历史子路径集合中的任意一个位置点,确定为匹配位置点;
46、将第一影响差异因子和第二影响差异因子之间的差异,确定为所述标记位置点和所述匹配位置点之间的影响偏差度,其中,第一影响差异因子是所述标记位置点与其前一个当前位置点对应的数据影响指标之间的差值,第二影响差异因子是所述匹配位置点与其前一个位置点对应的数据影响指标之间的差值;
47、根据所述标记位置点和所述匹配位置点之间的距离和影响偏差度,确定所述标记位置点和所述匹配位置点之间的初始正常因子,其中,所述标记位置点和所述匹配位置点之间的距离和影响偏差度均与其初始正常因子呈负相关;
48、从所述标记位置点和其所属当前子路径对应的历史子路径集合中各个位置点之间的初始正常因子中筛选出最大的初始正常因子,作为所述标记位置点对应的位置正常因子。
49、可选地,所述根据每个当前位置点对应的半径保留因子,对预设邻域半径进行修正,得到每个当前位置点对应的目标邻域半径,包括:
50、将每个当前位置点对应的半径保留因子和所述预设邻域半径的乘积,确定为每个当前位置点对应的目标邻域半径。
51、本发明具有如下有益效果:
52、本发明的一种用于船端与岸基的多源异构数据传输方法,实现了对多源异构数据的传输,解决了解决由于多源数据异常检测的准确度较差而导致的对用于船端与岸基的多源数据进行传输顺序设置的合理性较差的技术问题,提高了多源数据异常检测的准确度,进而提高了传输优先级设置的合理性,从而提高了对用于船端与岸基的多源数据进行传输顺序设置的合理性。首先,相较于只基于本次航行采集的多源数据进行密度分析,本发明在进行密度分析时,除了考虑了本次航行采集的多源数据,即当前轨迹信息中的多源数据之外,还考虑了历史轨迹信息,由于历史轨迹信息表征已完成航行的航行情况,所以,大多数历史轨迹信息中的多源数据往往表征船舶正常航行状态,因此,在考虑了当前轨迹信息和历史轨迹信息的基础上分析的当前位置点对应的密度分布情况,往往表征当前位置点在大多数表征船舶正常航行状态的位置点中的密度情况,此时当前位置点对应的密度分布越密集往往说明当前位置点越可能不是偏航点,在一定程度上减少了偏航异常数据的误判。其次,本发明在进行传输优先级设置时,除了考虑了数据密度分布情况之外,还考虑了数据影响指标和当前网络状态,从而提高了传输优先级设置的合理性,进而提高了对用于船端与岸基的多源数据进行传输顺序设置的合理性。
本文地址:https://www.jishuxx.com/zhuanli/20240802/237708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表