目标定位方法、图像显示方法、装置及计算机存储介质与流程
- 国知局
- 2024-08-08 16:51:03
本申请涉及无人机定位,特别是涉及一种目标定位方法、图像显示方法、目标定位装置及计算机存储介质。
背景技术:
1、近年来,无人机硬件及航拍技术长足发展,在国土、农林、测绘、水利及城市管理领域取得广泛应用。无人机影像目标检测、语义分割及变化检测技术,能够有效识别无人机视角下的各类型目标及场景信息,借助无人机自身具备的gps及rtk信息,将目标赋予位置信息。
2、而目前现有技术中只能识别影像中心点的空间位置,属于特定场景下的单点定位无法对整个无人机影像中的目标点进行精准定位。
技术实现思路
1、为解决上述技术问题,本申请提出了一种目标定位方法、图像显示方法、目标定位装置及计算机存储介质。
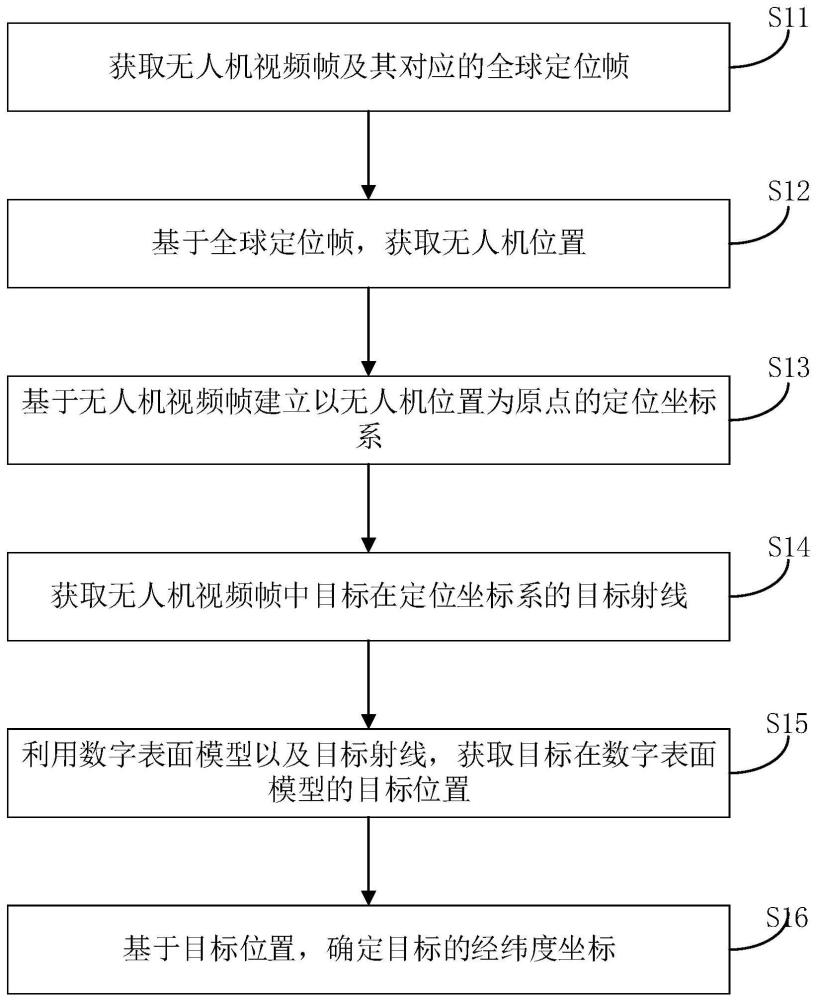
2、为解决上述技术问题,本申请提出了一种目标定位方法,所述目标定位方法包括:获取无人机视频帧及其对应的全球定位帧;基于所述全球定位帧,获取无人机位置;基于所述无人机视频帧建立以所述无人机位置为原点的定位坐标系;获取所述无人机视频帧中目标在所述定位坐标系的目标射线;利用数字表面模型以及所述目标射线,获取所述目标在所述数字表面模型的目标位置;基于所述目标位置,确定所述目标的经纬度坐标。
3、其中,所述获取无人机视频帧及其对应的全球定位帧,包括:获取所述无人机视频帧的第一每秒传输帧数和所述全球定位帧的第二每秒传输帧数;响应于所述第一每秒传输帧数大于所述第二每秒传输帧数,基于所述第一每秒传输帧数和所述第二每秒传输帧数获取插值参数;按照所述插值参数对所述全球定位帧进行插值处理,生成插值全球定位帧。
4、其中,所述插值参数包括插值数量和插值权重;所述按照所述插值参数对所述全球定位帧进行插值处理,生成插值全球定位帧,包括:获取待插值的前全球定位帧和后全球定位帧;按照所述插值数量生成相同数量的插值权重;按照所述插值权重将所述前全球定位帧和所述后全球定位帧进行融合,生成所述插值全球定位帧。
5、其中,所述按照所述插值权重将所述前全球定位帧和所述后全球定位帧进行融合,生成所述插值全球定位帧,包括:将所述前全球定位帧和所述后全球定位帧从球面坐标系转换到二维平面坐标系;按照所述插值权重将所述二维平面坐标系的前全球定位帧和所述后全球定位帧进行融合,生成所述二维平面坐标系的插值全球定位帧;将所述插值全球定位帧从所述二维平面坐标系转换到所述球面坐标系。
6、其中,所述获取所述无人机视频帧中目标在所述定位坐标系的目标射线,包括:获取所述无人机视频帧中的目标图像坐标;按照所述无人机视频帧的变换矩阵将所述目标图像坐标变换为所述定位坐标系的定位坐标;按照所述定位坐标系的原点与所述定位坐标生成所述目标射线。
7、其中,所述利用数字表面模型以及所述目标射线,获取所述目标在所述数字表面模型的目标位置之前,所述目标定位方法还包括:将所述数字表面模型转换到所述定位坐标系。
8、其中,所述利用数字表面模型以及所述目标射线,获取所述目标在所述数字表面模型的目标位置,包括:获取所述目标射线与所述数字表面模型的交点坐标;根据所述交点坐标获取所述目标位置。
9、为解决上述技术问题,本申请提出一种图像显示方法,所述图像显示方法包括:
10、获取无人机视频帧以及待叠加地理信息,其中,所述待叠加地理信息包括地理经纬度坐标;
11、基于所述无人机视频帧,获取无人机位置;
12、基于所述无人机位置、无人机相机内参,以及所述地理经纬度坐标,计算所述待叠加地理信息在所述无人机视频帧的第一图像坐标;
13、按照所述第一图像坐标将所述待叠加地理信息叠加显示在所述无人机视频帧;
14、其中,所述第一图像坐标通过上述的目标定位方法获取。
15、其中,所述计算所述待叠加地理信息在所述无人机视频帧的第一图像坐标之后,所述图像显示方法还包括:
16、判断所述第一图像坐标是否在所述无人机视频帧的图像范围内;
17、若否,按照所述第一图像坐标将所述待叠加地理信息叠加显示在所述无人机视频帧;
18、若是,以所述第一图像坐标为中心点,选取所述无人机视频帧的第一局部区域,并在所述第一局部区域提取第一特征点;
19、获取所述待叠加地理信息在底图上的第二图像坐标;
20、以所述第二图像坐标为中心点,选取所述底图的第二局部区域,并在所述第二局部区域提取第二特征点;
21、按照所述第一特征点和所述第二特征点的匹配关系确定的映射关系,获取所述底图上所述待叠加地理信息在所述无人机视频帧的第三图像坐标;
22、按照所述第三图像坐标将所述待叠加地理信息叠加显示在所述无人机视频帧。
23、其中,所述第一特征点为第一深度特征点或第一尺度不变特征转换特征点,所述第二特征点为第二深度特征点或第二尺度不变特征转换特征点。
24、为解决上述技术问题,本申请提出一种目标定位装置,所述目标定位装置包括存储器以及与所述存储器耦接的处理器;其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现上述的目标定位方法,和/或图像显示方法。
25、为解决上述技术问题,本申请提出一种计算机存储介质,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如上述的目标定位方法,和/或图像显示方法。
26、与现有技术相比,本申请的有益效果是:目标定位装置获取无人机视频帧及其对应的全球定位帧;基于所述全球定位帧,获取无人机位置;基于所述无人机视频帧建立以所述无人机位置为原点的定位坐标系;获取所述无人机视频帧中目标在所述定位坐标系的目标射线;利用数字表面模型以及所述目标射线,获取所述目标在所述数字表面模型的目标位置;基于所述目标位置,确定所述目标的经纬度坐标。通过结合定位,将无人机图像上的目标点准确转换成世界坐标,实现无人机准确定位。
技术特征:1.一种目标定位方法,其特征在于,所述目标定位方法包括:
2.根据权利要求1所述的目标定位方法,其特征在于,
3.根据权利要求2所述的目标定位方法,其特征在于,
4.根据权利要求3所述的目标定位方法,其特征在于,
5.根据权利要求1所述的目标定位方法,其特征在于,
6.根据权利要求1或5所述的目标定位方法,其特征在于,
7.根据权利要求6所述的目标定位方法,其特征在于,
8.一种图像显示方法,其特征在于,所述图像显示方法包括:
9.根据权利要求8所述的图像显示方法,其特征在于,
10.根据权利要求9所述的图像显示方法,其特征在于,
11.一种目标定位装置,其特征在于,所述目标定位装置包括存储器以及与所述存储器耦接的处理器;
12.一种计算机存储介质,其特征在于,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如权利要求1至7任一项所述的目标定位方法,和/或权利要求8至10任一项所述的图像显示方法。
技术总结本申请提出一种目标定位方法、图像显示方法、目标定位装置及计算机存储介质。所述目标定位方法包括:获取无人机视频帧及其对应的全球定位帧;基于所述全球定位帧,获取无人机位置;基于所述无人机视频帧建立以所述无人机位置为原点的定位坐标系;获取所述无人机视频帧中目标在所述定位坐标系的目标射线;利用数字表面模型以及所述目标射线,获取所述目标在所述数字表面模型的目标位置;基于所述目标位置,确定所述目标的经纬度坐标。通过结合定位,将无人机图像上的目标点准确转换成世界坐标,实现无人机准确定位。技术研发人员:任宇鹏,杨坚华,曹亚萍,李乾坤,殷俊受保护的技术使用者:浙江大华技术股份有限公司技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/270747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。