一种键合机高刚性并联驱动机构的制作方法
- 国知局
- 2024-08-08 17:24:54
本技术涉及半导体封装,粗铝线键合机,具体涉及一种键合机高刚性并联驱动机构。
背景技术:
1、在粗铝线键合焊线机领域,xy平台的刚性直接影响焊接效率和焊接质量。其中,刚性会直接影响直线电机的响应速度,及轴的稳定性进而影响焊接效率和焊接质量,为了提升轴的刚性,目前应用最为广泛的解决方法是选用高强度滚珠丝杠搭配伺服电机。
2、但是利用以上的方式作为xy的驱动会存在着一些问题和缺点。当选用高强度滚珠丝杠搭配直线导轨时,工作台存在驱动链,在高速急停急起状态下,机械摩擦产生的噪音较大,且中间传动连杆在起动、变速、换向过程中因弹性变形、摩擦磨损和反间隙而产生运动迟滞现象,导致工作台没办法达到最佳状态;与此同时,现有驱动平台的移动结构刚度和强度较差,无法满足技术要求。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的在于提供一种键合机高刚性并联驱动机构,能够提高驱动结构的精度和传输效率,同时整个驱动平台具有更高的结构强度。
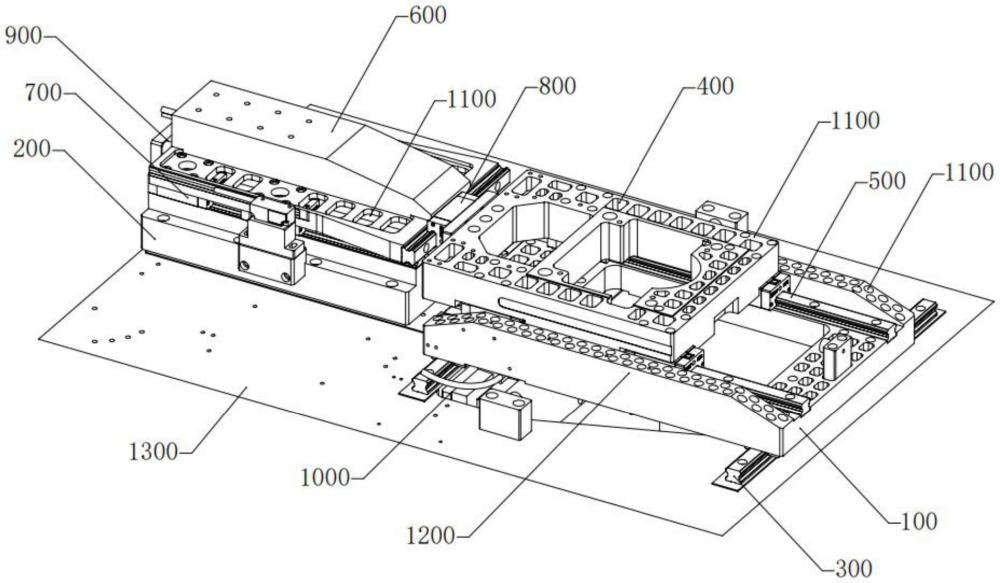
2、本实用新型采用的技术方案是:一种键合机高刚性并联驱动机构,包括水平相对布置的x滑板和y动力底板;所述x滑板底部设有在水平面上沿x轴布置的x轴直线导轨模组;所述x滑板上方设有能够在水平面上沿y轴移动的y滑板,y滑板底部设有y轴直线导轨模组;所述y动力底板上方设有能够在水平面上沿y轴移动的y动力滑板,y动力滑板底部设有y轴动力直线导轨;所述y动力滑板与y滑板相对的一端设有解耦导轨模组。
3、本技术方案中,x滑板能够沿x轴直线导轨模组在x轴线方向移动,y滑板能够沿y轴直线导轨模组在y轴方向移动,当y动力滑板与y滑板通过解耦导轨模组耦合时,y动力滑板能够通过y轴动力直线导轨驱动y滑板移动,整个设备联动运行时消除了中间传动连杆在起动、变速、换向过程中因弹性变形、摩擦磨损和反间隙而产生的运动迟滞现象,有更高的传动刚度。
4、优选的,所述y轴动力直线导轨为双导轨结构。
5、优选的,所述解耦导轨模组采用重载导轨结构。
6、优选的,所述y动力滑板纵向剖面呈“凸”形结构。
7、优选的,所述x滑板对应y滑板移动方向两侧设有加强梁。
8、优选的,所述加强梁呈梯形结构。
9、优选的,所述x滑板、y滑板和y动力滑板上设有阵列布置的减料孔。
10、本实用新型的有益效果;本实用新型消除了丝杆在起动、变速、换向过程中因弹性变形、摩擦磨损和反间隙而产生的运动迟滞现象,极大地提高了平台的刚度;传动装置取消了螺杆等部件的机械摩擦,而导轨可运用滚珠导轨或磁垫悬挂导轨(无机械接触),运动的噪音将极大降低,同时去除了中间传动环节,消除了机械摩擦中的能量损失,极大地提高了机台的工作效率;大幅提升平台的定位精度,同时响应非常灵敏和快速;整个平台设置有加强梁等结构,用于确保驱动平台的结构刚度和强度,提高平台运行稳定性,同时还通过设置减重结构满足设备轻量化的要求。
技术特征:1.一种键合机高刚性并联驱动机构,其特征在于,包括水平相对布置的x滑板(100)和y动力底板(200);
2.根据权利要求1所述的键合机高刚性并联驱动机构,其特征在于,所述y轴动力直线导轨(700)为双导轨结构。
3.根据权利要求1所述的键合机高刚性并联驱动机构,其特征在于,所述解耦导轨模组(800)采用重载导轨结构。
4.根据权利要求1所述的键合机高刚性并联驱动机构,其特征在于,所述y动力滑板(600)纵向剖面呈“凸”形结构。
5.根据权利要求1所述的键合机高刚性并联驱动机构,其特征在于,所述x滑板(100)对应y滑板(400)移动方向两侧设有加强梁(1200)。
6.根据权利要求5所述的键合机高刚性并联驱动机构,其特征在于,所述加强梁(1200)呈梯形结构。
7.根据权利要求1所述的键合机高刚性并联驱动机构,其特征在于,所述x滑板(100)、y滑板(400)和y动力滑板(600)上设有阵列布置的减料孔(1100)。
技术总结本技术公开了一种键合机高刚性并联驱动机构,包括X滑板和Y动力底板;X滑板底部设有X轴直线导轨模组;X滑板上方设有Y滑板,Y滑板底部设有Y轴直线导轨模组;Y动力底板上方设有Y动力滑板,Y动力滑板底部设有Y轴动力直线导轨;Y动力滑板与Y滑板相对的一端设有解耦导轨模组。本技术消除了丝杆在起动、变速、换向过程中因弹性变形、摩擦磨损和反间隙而产生的运动迟滞现象,提高了平台的刚度。传动装置取消了螺杆等部件的机械摩擦,运动的噪音将极大降低,同时响应非常灵敏和快速;整个平台设置有加强梁等结构,用于确保驱动平台的结构刚度和强度,提高平台运行稳定性,同时还通过设置减重结构满足设备轻量化的要求。技术研发人员:盛龙,王建平,杨仕基受保护的技术使用者:深圳市泰达智能装备有限公司技术研发日:20231226技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/274077.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表