雷达跟踪干扰波形设计方法及系统
- 国知局
- 2024-08-22 14:21:00
本发明涉及电子对抗,特别涉及一种雷达跟踪干扰波形设计方法及系统。
背景技术:
1、自雷达诞生以来,雷达跟踪技术一直受到高度重视,对跟踪雷达实施干扰,降低其威胁程度成为电子对抗领域的一个重要研究方向。对跟踪雷达的干扰技术发展经历了由压制干扰向欺骗干扰发展、由非相干干扰向相干干扰发展的过程,尤其是距离欺骗干扰、速度欺骗干扰等欺骗干扰方法对跟踪雷达依然是目前的主流干扰方法。随着智能化方法的发展,针对雷达跟踪的智能干扰波形设计称为跟踪雷达干扰的研究热点。跟踪雷达的核心环节是设计跟踪滤波器,具有代表性的卡尔曼滤波算法,经过多年发展,已经有多种新型卡尔曼滤波算法被提出并得到广泛应用。均方根容积卡尔曼滤波算法(square-root cubaturekalman filter,sckf)是在容积卡尔曼滤波算法基础上发展而来的,具有数学理论严谨、计算高效、稳定性好、避免对雅克比矩阵和正定性要求、适用范围广等优点,被广泛应用于目标跟踪、导航、状态估计、故障检测等领域。对跟踪雷达进行欺骗干扰,最终落脚点是实现对跟踪滤波器的干扰,使得滤波器输出结果满足欺骗设计要求,与目标真值渐行渐远,最终实现跟踪雷达对目标的失锁。
2、现有跟踪欺骗干扰技术中,针对自适应滤波的欺骗干扰技术,其将雷达跟踪滤波的估计误差协方差作为优化函数,设计了最优化干扰策略,但是该方法是一种半正定的最优化问题,需要滤波估计满足半正定条件,使用范围受限;基于距离波门拖引干扰的电子攻击系统,其没有考虑其他维度联合干扰的耦合效应;机载欺骗干扰方法,;主要是针对地面跟踪雷达进行假目标欺骗干扰。为此,亟需一种智能化欺骗干扰波形设计方案来适应目标跟踪、导航、状态估计、故障检测等电子对抗领域的设计要求。
技术实现思路
1、为此,本发明提供一种雷达跟踪干扰波形设计方法及系统,通过考虑距离、速度和角度等多维度指标来实现雷达跟踪干扰波形的智能化设计,能够诱使雷达跟踪系统跟踪干扰信号,提高电子对抗中的干扰效果。
2、按照本发明所提供的设计方案,一方面,提供一种雷达跟踪干扰波形设计方法,包含:
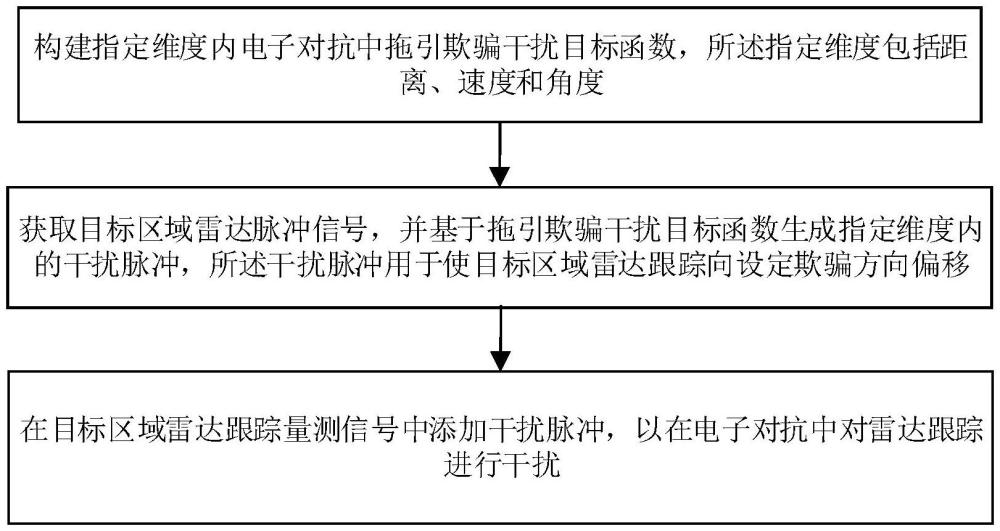
3、构建指定维度内电子对抗中拖引欺骗干扰目标函数,所述指定维度包括距离、速度和角度;
4、获取目标区域雷达脉冲信号,并基于拖引欺骗干扰目标函数生成指定维度内的干扰脉冲,所述干扰脉冲用于使目标区域雷达跟踪向设定欺骗方向偏移;
5、在目标区域雷达跟踪量测信号中添加干扰脉冲,以在电子对抗中对雷达跟踪进行干扰。
6、作为本发明雷达跟踪干扰波形设计方法,进一步地,构建指定维度内电子对抗中拖引欺骗干扰目标函数包含:
7、依据拖引欺骗干扰成功概率阈值、拖引欺骗干扰速度、雷达波门最大跟踪速度、雷达最大允许拖引欺骗干扰距离、当前拖引欺骗干扰点所处距离波门序列构建sckf残差约束函数,以依据sckf残差约束函数确定实施拖引欺骗干扰所带来的sckf残差控制范围;
8、依据雷达目标跟踪获取指定维度数据的时间间隔构建多维参数耦合约束函数,以依据多维参数耦合约束函数确定未受雷达抗干扰措施抑制的干扰信号,所述多维参数耦合约束函数包括距离和速度耦合约束;
9、依据指定维度中拖引欺骗干扰需要的脉冲数量、sckf残差及残差控制范围构建指定维度内电子对抗中拖引欺骗干扰目标函数。
10、作为本发明雷达跟踪干扰波形设计方法,进一步地,sckf残差约束函数表示为:其中,为拖引欺骗干扰成功概率阈值,c为光速,τ为距离波门宽度,vj为拖引欺骗干扰速度,vrmax为雷达波门最大跟踪速度,rmax为雷达最大允许拖引距离,mj为当前拖引点所处距离波门序列。
11、作为本发明雷达跟踪干扰波形设计方法,进一步地,多维参数耦合约束函数表示为:其中,δl为时间间隔段时间内的距离差,f0为雷达载频,c为光速,fd为多普勒频率,nsckf为一次相参积累的雷达脉冲数,tr为雷达重周。
12、作为本发明雷达跟踪干扰波形设计方法,进一步地,拖引欺骗干扰目标函数表示为:其中,分别为距离、速度和角度三个维度中拖引欺骗干扰需要的脉冲数量,αd、αs、αa分别为距离、速度、角度维度的sckf残差,[-ζd,ζd]、[-ζs,ζs]、[-ζa,ζa]分别为三个维度的残差控制范围,f0为雷达载频,δtj(t)为时延函数,fdj(t)表示多普勒频率。
13、作为本发明雷达跟踪干扰波形设计方法,进一步地,基于拖引欺骗干扰目标函数生成指定维度内的干扰脉冲,包含:
14、依据目标函数将雷达跟踪干扰波形设计问题转换为全局最优化问题;
15、利用遗传算法对目标函数就行求解,并基于遗传算法中的适应度获取干扰脉冲核心参数,所述核心参数包括干扰信号状态向量及干扰信号协方差矩阵;
16、依据干扰脉冲核心参数生成干扰脉冲信号。
17、作为本发明雷达跟踪干扰波形设计方法,进一步地,在目标区域雷达跟踪量测信号中添加干扰脉冲,以在电子对抗中对雷达跟踪进行干扰,包含:
18、在雷达目标跟踪系统sckf算法模型中的量测向量中添加干扰脉冲测量向量,通过sckf算法模型中的状态估计误差跟踪迭代来对雷达目标跟踪进行欺骗干扰。
19、再一方面,本发明还提供一种雷达跟踪干扰波形设计系统,包含:目标函数构建模块、干扰信号生成模块和跟踪干扰欺骗模块,其中,
20、目标函数构建模块,用于构建指定维度内电子对抗中拖引欺骗干扰目标函数,所述指定维度包括距离、速度和角度;
21、干扰信号生成模块,用于获取目标区域雷达脉冲信号,并基于拖引欺骗干扰目标函数生成指定维度内的干扰脉冲,所述干扰脉冲用于使目标区域雷达跟踪向设定欺骗方向偏移;
22、跟踪干扰欺骗模块,用于在目标区域雷达跟踪量测信号中添加干扰脉冲,以在电子对抗中对雷达跟踪进行干扰。
23、本发明的有益效果:
24、本发明构建目标函数及sckf残差约束函数和距离速度耦合约束函数,使得智能化干扰波形可以顺利通过雷达信号处理和抗干扰抑制,通过干扰有效性评价指标和遗传算法ipmga来实现对雷达跟踪波门的快速拖引,提升电子对抗中的雷达跟踪干扰效果。并进一步通过对比实验,本案方案中的mmisckf干扰算法可以有效避免被雷达抗干扰方法抑制,并且能比匀加速拖引更快的实现雷达跟踪失锁,能够快速、有效地实现雷达跟踪假目标欺骗,在电子对抗领域具有一定的理论和工程指导意义。
技术特征:1.一种雷达跟踪干扰波形设计方法,其特征在于,包含:
2.根据权利要求1所述的雷达跟踪干扰波形设计方法,其特征在于,构建指定维度内电子对抗中拖引欺骗干扰目标函数,包含:
3.根据权利要求2所述的雷达跟踪干扰波形设计方法,其特征在于,sckf残差约束函数表示为:其中,为拖引欺骗干扰成功概率阈值,c为光速,τ为距离波门宽度,vj为拖引欺骗干扰速度,vrmax为雷达波门最大跟踪速度,rmax为雷达最大允许拖引距离,mj为当前拖引点所处距离波门序列。
4.根据权利要求2所述的雷达跟踪干扰波形设计方法,其特征在于,多维参数耦合约束函数表示为:其中,δl为时间间隔段时间内的距离差,f0为雷达载频,c为光速,fd为多普勒频率,nsckf为一次相参积累的雷达脉冲数,tr为雷达重复周期。
5.根据权利要求1或2所述的雷达跟踪干扰波形设计方法,其特征在于,拖引欺骗干扰目标函数表示为:其中,分别为距离、速度和角度三个维度中拖引欺骗干扰需要的脉冲数量,αd、αs、αa分别为距离、速度、角度维度的sckf残差,[-ζd,ζd]、[-ζs,ζs]、[-ζa,ζa]分别为三个维度的残差控制范围,f0为雷达载频,δtj(t)为时延函数,fdj(t)表示多普勒频率函数。
6.根据权利要求1所述的雷达跟踪干扰波形设计方法,其特征在于,基于拖引欺骗干扰目标函数生成指定维度内的干扰脉冲,包含:
7.根据权利要求1所述的雷达跟踪干扰波形设计方法,其特征在于,在目标区域雷达跟踪量测信号中添加干扰脉冲,以在电子对抗中对雷达跟踪进行干扰,包含:
8.一种雷达跟踪干扰波形设计系统,其特征在于,包含:目标函数构建模块、干扰信号生成模块和跟踪干扰欺骗模块,其中,
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,当计算机程序被执行时,能够实现如权利要求1~7任一项所述的方法。
技术总结本发明涉及电子对抗技术领域,特别涉及一种雷达跟踪干扰波形设计方法及系统,通过构建指定维度内电子对抗中拖引欺骗干扰目标函数,所述指定维度包括距离、速度和角度;获取目标区域雷达脉冲信号,并基于拖引欺骗干扰目标函数生成指定维度内的干扰脉冲,所述干扰脉冲用于使目标区域雷达跟踪向设定欺骗方向偏移;在目标区域雷达跟踪量测信号中添加干扰脉冲,以在电子对抗中对雷达跟踪进行干扰。本发明通过智能化干扰波形的设计,能够顺利通过雷达信号处理和抗干扰抑制,并利用干扰有效性评价指标和遗传算法IPMGA来实现对雷达跟踪波门的快速拖引,提升电子对抗中的雷达跟踪干扰效果。技术研发人员:王海军,胡涛,吴迪,陈冬冬,姚伟辉,何润泽,李汀立,刘凯越,王书,张靖志受保护的技术使用者:中国人民解放军战略支援部队信息工程大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/278259.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表