电气化铁路接触网螺栓群视觉伺服定位方法
- 国知局
- 2024-08-22 14:26:47
本发明涉及铁路检修,特别是涉及一种电气化铁路接触网螺栓群视觉伺服定位方法。
背景技术:
1、随着国家电气化铁路的不断发展,与之配套的铁路网系统规模的不断扩大,电气化铁路维修保养的作业效率和管理要求也在不断提高。接触网作为电气化铁路提供牵引供电设备中最重要的组成部分之一,一旦出现故障,就会导致运行过程中的电力机车停运。此外电力机车在运行过程中产生的振动易导致接触网组件出现松动,进而可能导致接触网输电功能失效。因此,对接触网上的螺栓紧固件开展定期检修是维持接触网稳定工作的重要措施。
2、目前,对电气化铁路接触网螺栓进行的紧固检修作业主要通过人工作业完成。由于接触网螺栓离作业车平台有一定的高度差,工人在进行检修工作时需要利用检修作业车上的液压起升平台完成作业,存在劳动强度较大、作业效率较低以及安全隐患高等问题。
技术实现思路
1、针对上述问题,本发明实施例提供了一种电气化铁路接触网螺栓群视觉伺服定位方法。
2、本发明实施例提供的一种电气化铁路接触网螺栓群视觉伺服定位方法,包括:
3、将搭载螺栓紧固机器人的液压升降平台检修车移至预设作业位置,利用液压升降平台将螺栓紧固机器人升至作业高度;
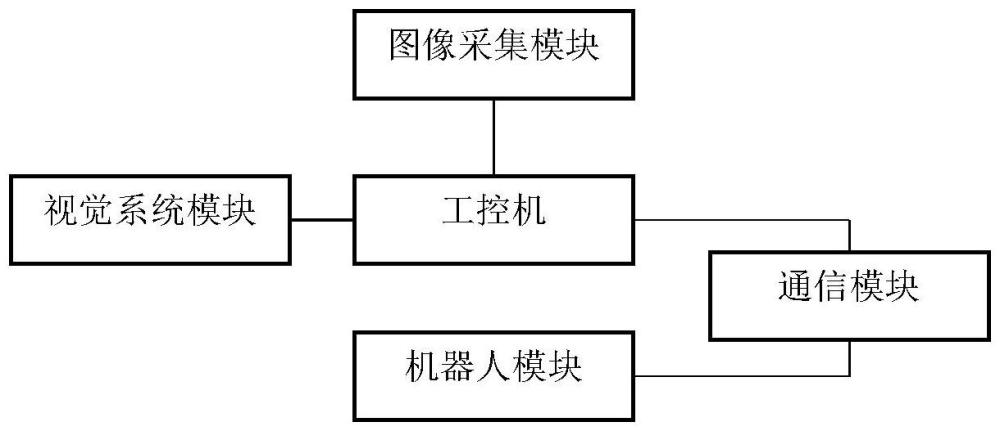
4、利用螺栓紧固机器人上的深度相机采集接触网螺栓群的目标图像并将目标图像发送至工控机;
5、工控机接收到目标图像之后,通过目标检测算法识别出目标图像中包含的各个螺栓,并选定用于进行视觉伺服定位的目标螺栓对象;
6、工控机联动螺栓紧固机器人对目标螺栓对象进行视觉伺服定位,定位后对目标螺栓对象进行紧固;
7、工控机针对目标图像中剩余螺栓规划出紧固顺序,并以目标螺栓对象的坐标信息分别确定剩余每个螺栓的位置信息,最后依据紧固顺序和位置信息完成剩余各个螺栓的紧固作业。
8、与现有技术相比,本发明的有益效果在于:设计一种电气化铁路接触网螺栓群视觉伺服定位方法辅助螺栓紧固机器人对螺栓进行精准的定位,从而实现自动化的电气化铁路接触网螺栓紧固作业。
9、可选的,目标检测算法是基于mobilenet和ghostnet实现的轻量化yolov5s网络,首先基于mobilenetv3轻量级网络结构,将yolov5s主干网络中参数量占比较大的残差块和普通卷积块用mobilenetv3的瓶颈层模块替换,作为基础模块构建改进的yolov5s主干网络,之后将瓶颈层中的c3卷积模块替换为c3ghost模块以减少参数量;
10、进行目标识别时,在改进的yolov5s网络中,目标图像首先通过主干网络在不同颗粒度上聚合形成特征图,随后再通过瓶颈层网络进行特征的组合并传递到头部输出层中,最后由头部输出层完成目标检测。
11、可选的,选定用于进行视觉伺服定位的目标螺栓对象的过程包括:计算深度相机视野内所有螺栓的中心与相机中心之间的间隔距离d1,选取间隔距离d1最短的螺栓作为目标螺栓对象。
12、可选的,工控机联动螺栓紧固机器人对目标螺栓对象进行视觉伺服定位的过程包括:
13、工控机选定目标螺栓对象的目标检测矩形框的四个角点作为特征点,利用选定的特征点的坐标以及深度信息来联动螺栓紧固机器人进行视觉伺服定位。
14、可选的,视觉伺服定位过程中,设置两个伺服收敛条件:首先是根据螺栓紧固作业的精度要求,设定视觉伺服定位中心与螺栓端面中心的对准误差e,因此当螺栓端面中心与视觉伺服定位中心之间d2在对准误差e限定的范围内时结束收敛;
15、其次,考虑螺栓紧固机器人的紧固末端执行器本身尺寸对定位时目标螺栓对象深度获取的影响,因此当深度相机获取的深度值z不小于设定的阈值时结束收敛,若d2超出对准误差e限定的范围,则控制螺栓紧固机器人将紧固末端执行器在垂直与螺栓端面的方向上后退设定距离,之后再次进行视觉伺服定位。
16、可选的,定位后对目标螺栓对象进行紧固的过程包括:工控机根据定位后深度相机获取的深度值z计算紧固末端执行器进给量,工控机随后联动螺栓紧固机器人按照进给量移动紧固末端执行器进而由紧固末端执行器完成紧固作业。
17、可选的,以目标螺栓对象的坐标信息分别确定剩余每个螺栓的位置信息的过程包括:
18、获取深度相机与接触网螺栓紧固作业平面的垂直距离,根据所获取的垂直距离进行标定得到像素值与实际物理值之间的标定比例,根据标定比例将螺栓像素坐标换算为世界坐标,以目标螺栓对象的坐标信息为基础基于该标定比例分别计算出世界坐标系下剩余螺栓的位置信息。
技术特征:1.一种电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,包括:
2.如权利要求1所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,目标检测算法是基于mobilenet和ghostnet实现的轻量化yolov5s网络,首先基于mobilenetv3轻量级网络结构,将yolov5s主干网络中参数量占比较大的残差块和普通卷积块用mobilenetv3的瓶颈层模块替换,作为基础模块构建改进的yolov5s主干网络,之后将瓶颈层中的c3卷积模块替换为c3ghost模块以减少参数量;
3.如权利要求1所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,选定用于进行视觉伺服定位的目标螺栓对象的过程包括:计算深度相机视野内所有螺栓的中心与相机中心之间的间隔距离d1,选取间隔距离d1最短的螺栓作为目标螺栓对象。
4.如权利要求1所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,工控机联动螺栓紧固机器人对目标螺栓对象进行视觉伺服定位的过程包括:
5.如权利要求4所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,视觉伺服定位过程中,设置两个伺服收敛条件:首先是根据螺栓紧固作业的精度要求,设定视觉伺服定位中心与螺栓端面中心的对准误差e,因此当螺栓端面中心与视觉伺服定位中心之间d2在对准误差e限定的范围内时结束收敛;
6.如权利要求5所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,定位后对目标螺栓对象进行紧固的过程包括:工控机根据定位后深度相机获取的深度值z计算紧固末端执行器进给量,工控机随后联动螺栓紧固机器人按照进给量移动紧固末端执行器进而由紧固末端执行器完成紧固作业。
7.如权利要求1所述的电气化铁路接触网螺栓群视觉伺服定位方法,其特征在于,以目标螺栓对象的坐标信息分别确定剩余每个螺栓的位置信息的过程包括:
技术总结本发明涉及铁路检修技术领域,具体为一种电气化铁路接触网螺栓群视觉伺服定位方法,采用基于深度学习的目标检测算法实现对接触网螺栓群的检测,在此基础上利用视觉伺服算法实现对单个螺栓的精确定位,并选择合适的定位顺序规划算法来实现对螺栓群顺序定位。本发明意在辅助实现电气化铁路接触网螺栓紧固的智能化作业,相较于人工作业,较大地降低了工作强度和作业的安全隐患,并在一定程度上提升了作业效率。技术研发人员:刘桓龙,聂志宇,刘宇骐受保护的技术使用者:西南交通大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/278693.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。