一种基于速率分割的无人机辅助通感一体化网络优化方法
- 国知局
- 2024-08-22 15:08:42
本发明涉及无线通信,提出了一种基于速率分割的无人机辅助通感一体化网络优化方法。
背景技术:
1、近年来,通信感知一体化(integrated sensing and communication, isac)已经成为学术界最热门的话题之一,并将成为未来无线通信系统中最核心的新兴特性。两种技术集成,可以实现雷达和通信频谱共享,提高频谱利用率,这种一体化的设计能够获得“集成增益”,另外,通信与感知系统能够互惠互利,例如车联网场景中,利用感知辅助通信,利用雷达回波做跟踪等,从而获得一体化系统的“协作增益”。
2、isac为实现智能城市、智能制造、自动驾驶等的环境和位置感知应用提供了新的机会。然而,传统的地面isac网络只能在固定和有限的范围内提供传感服务,因为周围的障碍物可能会阻挡与远程目标的视距连接,这导致传感性能严重退化。受无人机通信的发展,人们越来越有兴趣将无人机用作具有成本效益的空中平台,以提供增强的isac服务,支持交通事故救援、非授权窃听器监测和临时热点地区的服务增强。通过利用无人机在三维空间中的高机动性及其强大的空地视距信道,与地面isac相比,无人机isac有望提供更好的覆盖范围、更灵活的监视性能。然而,这种新的航空isac范式也带来了新的设计挑战。鉴于强视距的干扰问题考虑,迫切需要研究无人机isac系统的联合设计,以提高频谱效率、减轻干扰。
3、针对干扰问题,从多址接入技术入手解决。速率分拆多址技术(rate splittingmultiple access,rsma)是用于设计和优化未来无线网络的非正交传输、多址和干扰管理策略,通过对用户消息的拆分,以及多用户解码的通用消息和相应用户解码的私有消息的非正交传输,调和完全解码干扰和视干扰为噪声的两种极端干扰管理策略。相较于以往采用的空分或非正交多址技术,通过信息和通信理论分析,rsma已被证明在几种传输场景中是最优的(从自由度区域的角度来看)。与5g中使用的传统多址策略相比,rsma能够增强频谱效率、能源效率、覆盖范围、用户公平性、可靠性和服务质量,以应对广泛的网络负载(包括负载不足和过载情况)和用户通道条件。此外,它对发射机上的不完全信道状态信息具有较高的鲁棒性,并具有较低的反馈开销和复杂性。
4、鉴于在空中通信背景下速率分割多址接入技术还没有很好地得到运用,这促使我们将无人机辅助通信感知一体化场景和rsma技术结合起来,以改善向地面用户的无线数据传输。
技术实现思路
1、根据上述提出的技术问题,提供基于速率分割的无人机辅助通感一体化网络优化方法,包括如下步骤:
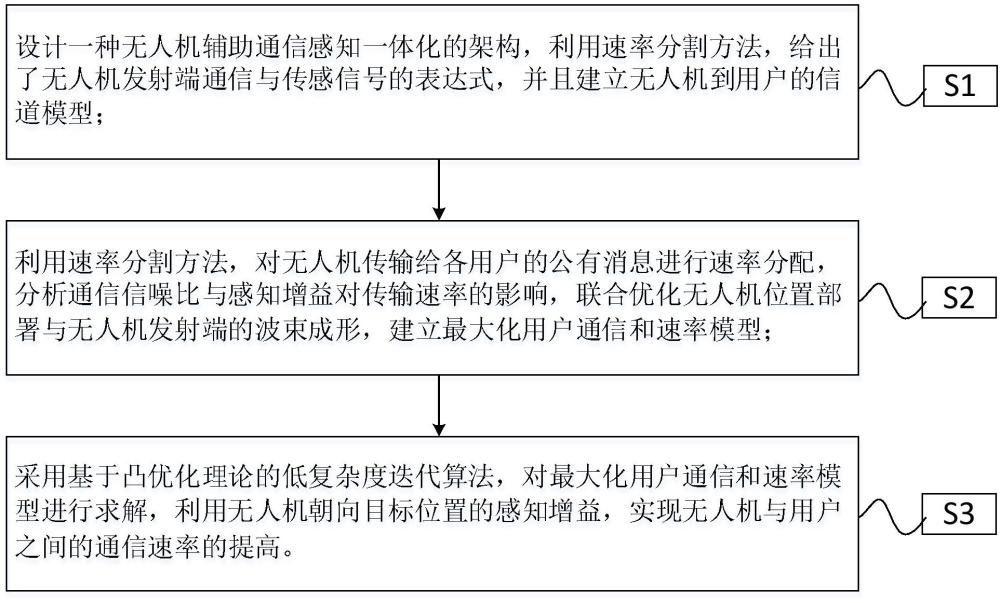
2、s1、根据无人机的机动性和强视距性,设计一种无人机辅助通信感知一体化的架构,利用速率分割方法,给出了无人机发射端通信与传感信号的表达式,并且建立无人机到用户的信道模型;
3、s2、利用速率分割方法,对无人机传输给各用户的公有消息进行速率分配,分析通信信噪比与感知增益对传输速率的影响,联合优化无人机位置部署与无人机发射端的波束成形,建立最大化用户通信和速率模型;
4、s3、采用基于凸优化理论的低复杂度迭代算法,对最大化用户通信和速率模型进行求解,利用无人机朝向目标位置的感知增益,实现无人机与用户之间的通信速率的提高。
5、进一步地:所述根据无人机的机动性和强视距性,设计一种无人机辅助通信感知一体化的架构,利用速率分割方法,给出了无人机发射端通信与传感信号的表达式,并且建立无人机到用户的信道模型具体过程为:
6、s11、假定表示任意矩阵,表示矩阵的转置,表示矩阵的共轭转置,表示矩阵的秩,表示的迹,代表矩阵的第行第列中的元素,为的统计期望,是单位矩阵;
7、基于三维笛卡尔坐标系,地面基站的位置定义为,其中为基站x轴坐标值,为基站y轴坐标值,用表示基站水平位置,设表示地面通信用户的集合,为用户数量,其中用户的位置固定在,,为用户于x轴的坐标值,为用户于y轴的坐标值,表示用户水平位置,用表示无人机uav的位置,其中为uav在x轴的坐标值,为uav在y轴的坐标值, 无人机水平位置用表示,表示无人机飞行高度,默认uav高度恒定,位置保持悬停状态;
8、s12、在地面基站到无人机之间,建立一个下行链路信道模型,设发射波束成形器在基站处的增益为,在无人机处的增益为;
9、,
10、其中:表示地面基站发射的出发角度,代表基站波束宽度,窄波束;
11、,
12、其中:表示相对基站而言无人机的俯视角度,代表无人机处的波束宽度;
13、地面基站到无人机之间的信噪比记为,其中表示发射功率,代表下行链路信道模型,为无人机与基站间的距离,为信道的功率增益,表示噪声;那么基站到无人机链路的信道容量大小为;
14、s13、无人机uav给用户传输通信信息流,向目标传输感知序列,第个用户的消息被划分为公共部分和私有部分,所有用户的公共部分消息被联合编码到公共流中,私有部分消息分别被编码到私有流中,通信信息流以及感知序列一起表示为,,在发射之前使用预编码器对数据流矢量进行线性预编码,其中是公共流的预编码器,是感知序列的预编码器;
15、s14、因此,无人机uav发射端的信号表示为:
16、
17、其中:表示感知信号,表示通信信号的公有部分与私有部分;
18、将感知信号的协方差矩阵记为,通信信号的公有部分与私有部分功率分别是、;假设uav处的最大发射功率为,那么无人机uav的平均发射功率的约束为;
19、s15、建立los信道模型,从无人机uav到用户的信道向量表示为:
20、
21、其中:表示uav和用户之间的距离,表示朝向用户的转向矢量,是无人机配备的发射天线数量,为信道的功率增益,为两个相邻天线之间的间距,是载波波长,且固定为的一半;表示无人机相对于用户的俯角,第个下行链路通信用户处的接收信号为,其中表示用户接收器处的加性高斯白噪声。
22、进一步地:所述利用速率分割方法,对无人机传输给各用户的公有消息进行速率分配,分析通信信噪比与感知增益对传输速率的影响,联合优化无人机位置部署与无人机发射端的波束成形,建立最大化用户通信和速率模型的过程如下:
23、s21、在接收端,每个用户首先通过将所有私有信号流带来的干扰视为噪声来解码公有信号流,得到公有消息,假设串行干扰消除sic不应用于,那么第个用户处解码公有信号流的信号干扰噪声比:
24、
25、在用户处的的实现速率,为了保证所有用户都能解码公共流,公有消息的传输速率,且由于是个用户共享的,因此,其中是传输时的公有速率,记公共速率分配矢量;
26、为了在用户接收处实现sic操作,每个用户的发射功率必须满足约束条件如下:,其中是解码信号功率与未解码的用户间干扰信号功率、噪声功率、传感功率之间的最小差值,
27、在满足约束条件的情况下,从接收信号中消除公有部分,用户再将其他用户的私有信号流带来的干扰视为噪声来解码自己的私有信号流,进而得到私有消息,在用户处解码的sinr:
28、
29、私有部分信号流的可达速率为;
30、s22、假设目标位置是根据无人机的特定传感任务预先确定的,无人机uav在已知它们的前提下进行感测,设表示被感测的目标的集合,为目标数量,目标的水平位置由表示,。采用朝向潜在目标位置的发射波束方向图增益作为传感的性能指标,描述发射功率的分布,考虑将通信信号和传感信号共同用于感知,在这种情况下,朝向的发射波束方向增益则表示为:
31、;
32、其中:表示朝向目标的转向矢量;
33、s23、联合优化无人机位置、公共速率分配矢量与发射波束成形矩阵,最大化用户通信和速率模型的表达式如下:
34、
35、其中,c1和c2表示公共速率要求;c3表示发射功率约束;c4表示解码公有成功条件;c5为感知功能波束增益要求,代表感知波束阈值;c6为从bs到uav和从uav到地面两个下行传输阶段的容量约束。
36、进一步地:所述采用基于凸优化理论的低复杂度迭代算法,对最大化用户通信和速率模型进行求解,利用无人机朝向目标位置的感知增益,实现无人机与用户之间的通信速率提高的过程如下:
37、s31、利用逐次凸逼近原理,将问题分解为波束成形子问题和无人机部署两个子问题,交替优化发射波束成形矩阵、无人机定位;
38、s32、首先固定无人机位置,将发射波束成形子问题表示为:
39、
40、s33、为了有效求解问题,定义辅助变量,私有信号波束矩阵,其中,;将优化变量拆分成三部分:、、分别表示通信信号公共部分、私有部分与感知信号的发射波束矩阵;
41、s34、采用逐次凸逼近与半正定松弛法算法进行求解;得到,公有消息的传输速率如下:
42、
43、私有消息的传输速率为;
44、问题改写为:
45、
46、s35、采用逐次凸逼近方法以迭代的形式将非凹目标函数转换成凹目标函数来求解问题,代表迭代次数;
47、
48、其中,;
49、这里,由于是凹函数减凹函数的形式,因此需要对第二个凹项式进行一阶泰勒展开,并用其公有速率下界代替,同样,也需要同样的替换方法改写成其私有速率下界:
50、
51、其中,;
52、s36、然后,使用半正定松弛方法来处理问题中的非凸秩约束c7,将秩约束放宽,最终问题表达为:
53、
54、由此,非凹目标函数近似为了凹目标函数,凹目标函数以迭代次的方式实现采用cvx凸优化求解器进行最优求解;
55、s37、已知了第一个子问题求解得到的和,对无人机的位置进行优化,无人机位置部署子问题表示为:
56、
57、由于该目标函数是非凹的,约束c5是非凸的,且优化变量无人机的位置涉及到转向矢量,因此问题难以进行直接求解,为了有效求解问题,仍然采用逐次凸逼近方法,在已知的情况下,问题简化为:
58、
59、接下来,利用sca处理目标函数的非凹性,私有速率近似为:其中,;
60、和分别表示通信信号私有部分与感知信号发射波束矩阵第行第列元素对应的相位角大小;
61、s38、再根据一阶泰勒展开将近似为,为本轮迭代次数,得到:
62、
63、其中,;
64、;
65、;
66、s39、到目前为止,非凹目标函数已经近似为凹函数,然而约束仍然是一个非凸约束,设集成矩阵,下面将近似为凸约束:
67、
68、其中,;;
69、同时,为了保证逼近的精确,还需要施加一个约束,表示精度阈值,记最终问题:
70、
71、利用cvx求解器不断迭代更新无人机位置,获得问题的最优解。
72、本发明一种基于速率分割的无人机辅助通感一体化网络优化方法,针对其他多址方案在解决干扰问题时无法很好应对6g挑战的情况,利用速率分拆思想,根据逐次凸逼近(successive convex approximation,sca)原理提出一种低复杂度的迭代算法,将优化问题分解为波束成形子问题和无人机部署子问题,交替优化发射波束成形矩阵、无人机定位,其有益效果是提出的策略能够在保证感知性能前提下,有效提高通信性能。
73、现有技术相比,本发明具有以下优点:
74、本发明提供的基于速率分割的无人机辅助通感一体化网络优化方法,能够使这种新的航空isac形式改善设计上的挑战,实现空地一体化,有效地提高频谱效率、减轻干扰。
75、本发明能够根据速率分拆的传输策略与功率分配来协调传感通信之间的固有权衡,有效地提高了通信用户的和速率。
76、基于上述理由本发明可在无线通信等领域广泛推广。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281357.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表