面向航磁探测的无人机路径规划算法的制作方法
- 国知局
- 2024-09-05 14:28:42
本发明涉及无人机技术,尤其涉及面向航磁探测的无人机路径规划算法。
背景技术:
1、在航磁探测过程中,需要获取飞机的姿态信息以及飞机当前姿态所引入的磁场干扰大小。一般而言,通过三分量磁力仪测量磁场矢量值可以获取飞机的姿态信息,通过总场磁力仪测量磁场的标量值获取此姿态的干扰大小。为了测量过程中数据精度尽可能高,三分量磁力仪和总场磁力仪的探头都需要放置在飞机机头前方,或者机尾后方,或者翼尖部位。
2、对于有人机而言,飞机空间大改造容易,但是对于无人机航磁,无人机自身载重不如有人机,并且改造难度大。
技术实现思路
1、在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
2、鉴于此,本发明提供了面向航磁探测的无人机路径规划算法,以至少解决由于无人机自身载重小难以安装三分量磁力仪等设备的问题。
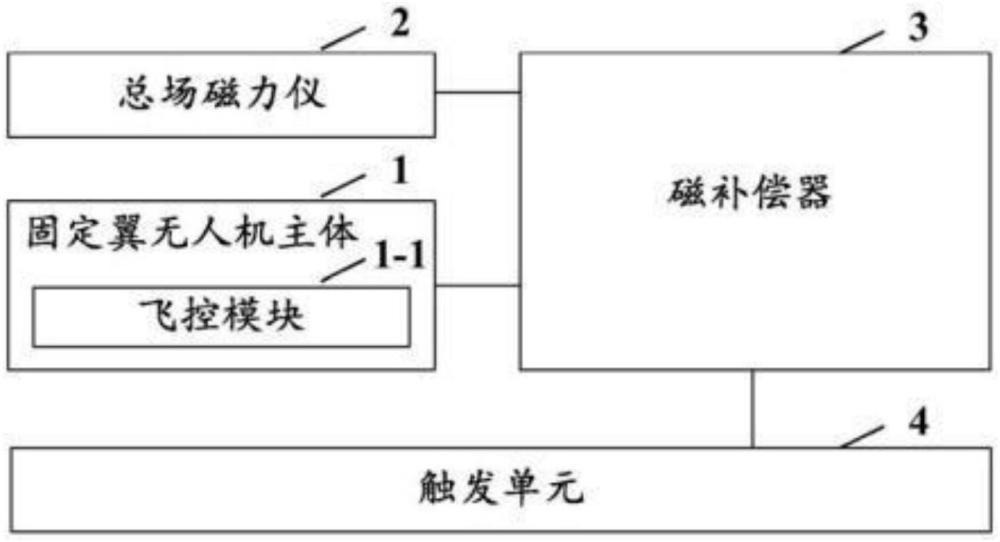
3、根据本发明的一个方面,提供了一种航磁探测系统,航磁探测系统包括固定翼无人机主体、总场磁力仪、磁补偿器、触发单元和航姿仪,总场磁力仪、磁补偿器以及航姿仪分别设置在固定翼无人机主体上;航姿仪适于实时获取固定翼无人机主体的飞机姿态数据;触发单元适于当检测到外部触发脉冲后,触发总场磁力仪进行频率计数,并同时触发磁补偿器读取来自航姿仪的当前飞机姿态数据;总场磁力仪适于将通过频率计数获得的频率值转换为磁场值,作为当前磁总场数据发送给磁补偿器;磁补偿器适于对读取到的当前飞机姿态数据进行滑动均值滤波,以利用当前磁总场数据和经过滑动均值滤波后的当前飞机姿态数据进行航磁补偿。
4、进一步地,总场磁力仪安装在固定翼无人机主体的机尾后部,而磁补偿器设置于固定翼无人机主体的机身腹部。
5、进一步地,波特率设置为115200。
6、进一步地,磁补偿器适于按照如下过程进行航磁补偿:设任意时刻地磁场hearth与固定翼无人机主体的机体的三轴x、y和z之间的角度分别为α、β和γ,用cx、cy和cz分别表示α、β和γ各自的方向余弦,使得且
7、设飞机干扰场为hd,将hd划分为恒定场hcon、感应场hinduce和涡流场hvortex;设恒定场系数为pi(i=1,2,3),则得:设感应场系数aij(i=1,2,3;j=1,2,3),则得设涡流场系数为bij(i=1,2,3;j=1,2,3),则得设磁力仪测得的总场为htotal,则
8、
9、飞机在校准过程中是出在海拔3–4km处的高空中,假设地磁场hearth保持不变,则则:
10、
11、将式中的(a11+1)hearth、(a22+1)hearth(a33+1)hearth、(a12+a21)hearth、(a13+a31)hearth、(a23+a32)hearth分别记为同时,bijhearth(i=1,2,3;j=1,2,3)记为,则:
12、
13、其中,δ表示由方向余弦及其导数构成的行向量,x为未知航磁干扰补偿系数构成的行向量,即:
14、
15、根据htotal=δtθ得到如下方程组,用于估计未知系数构成的行向量的值:h=αtθ;其中,θ包括18项未知系数,α是n×18的矩阵,而h是n×1的列向量;则得如下线性方程组:
16、
17、即α=(δ1δ2…δn);其中,δi(i=1,2,3…n)为第i次采样得的方向余弦及其导数构成的行向量,htotal(i)为第i次采样得到的总场磁力仪输出值,n为采集次数;记通带为0.06-1.0hz的滤波器为bpf,则对线性方程组进行带通滤波:bpf(h)=bpf(αt)θ;其中,bpf(h)表示利用滤波器对总场列向量进行带通滤波,bpf(αt)表示利用滤波器对方向余弦矩阵的每一列进行带通滤波;对滤波后的线性方程组中未知航磁干扰补偿系数构成的行向量θ进行估计,利用递推最小二乘法求取未知航磁干扰补偿系数构成的行向量θ的估计值在实际航磁测量的时候,飞机产生的磁干扰的值hd根据下式计算得到:获得不含飞机磁干扰的有效值如下:he=htotal-hd。
18、根据本发明的另一方面,还提供了一种磁探测方法,该航磁探测方法通过航磁探测系统实现,所述航磁探测系统包括固定翼无人机主体、总场磁力仪、磁补偿器、触发单元和航姿仪;所述总场磁力仪、所述磁补偿器以及所述航姿仪分别设置在所述固定翼无人机主体上;所述航姿仪适于实时获取固定翼无人机主体的飞机姿态数据;航磁探测方法包括:当触发单元检测到外部触发脉冲后,触发所述总场磁力仪进行频率计数,并同时触发所述磁补偿器读取来自所述航姿仪的当前飞机姿态数据;通过所述总场磁力仪将通过频率计数获得的频率值转换为磁场值,作为当前磁总场数据发送给所述磁补偿器;通过所述磁补偿器对读取到的当前飞机姿态数据进行滑动均值滤波,以利用所述当前磁总场数据和经过滑动均值滤波后的当前飞机姿态数据进行航磁补偿。
19、进一步地,所述总场磁力仪安装在所述固定翼无人机主体的机尾后部,而所述磁补偿器设置于所述固定翼无人机主体的机身腹部。
20、进一步地,波特率设置为115200。
21、进一步地,所述利用所述当前磁总场数据和经过滑动均值滤波后的当前飞机姿态数据进行航磁补偿的步骤包括:
22、设任意时刻地磁场hearth与固定翼无人机主体的机体的三轴x、y和z之间的角度分别为α、β和γ,用cx、cy和cz分别表示α、β和γ各自的方向余弦,使得且
23、
24、
25、设飞机干扰场为hd,将hd划分为恒定场hcon、感应场hinduce和涡流场hvortex;
26、设恒定场系数为pi(i=1,2,3),则得:
27、
28、设感应场系数aij(i=1,2,3;j=1,2,3),则得
29、
30、设涡流场系数为bij(i=1,2,3;j=1,2,3),则得
31、
32、设磁力仪测得的总场为htotal,则
33、
34、假设地磁场hearth保持不变,则
35、则:
36、
37、将式中的(a11+1)hearth、(a22+1)hearth(a33+1)hearth、(a12+a21)hearth、(a13+a31)hearth、(a23+a32)hearth分别记为同时,bijhearth(i=1,2,3;j=1,2,3)记为,则,
38、
39、其中,δ表示由方向余弦及其导数构成的行向量,x为未知航磁干扰补偿系数构成的行向量,即:
40、
41、根据htotal=δtθ得到如下方程组,用于估计未知系数构成的行向量的值:
42、h=αtθ
43、其中,θ包括18项未知系数,α是n×18的矩阵,而h是n×1的列向量;则得如下线性方程组:
44、
45、即
46、α=(δ1δ2…δn)
47、其中,δi(i=1,2,3…n)为第i次采样得的方向余弦及其导数构成的行向量,htotal(i)为第i次采样得到的总场磁力仪输出值,n为采集次数;
48、记通带为0.06-1.0hz的滤波器为bpf,则对线性方程组进行带通滤波:
49、bpf(h)=bpf(αt)θ
50、其中,bpf(h)表示利用滤波器对总场列向量进行带通滤波,bpf(αt)表示利用滤波器对方向余弦矩阵的每一列进行带通滤波;
51、对滤波后的线性方程组中未知航磁干扰补偿系数构成的行向量θ进行估计,利用递推最小二乘法求取未知航磁干扰补偿系数构成的行向量θ的估计值
52、在实际航磁测量的时候,飞机产生的磁干扰的值hd根据下式计算得到:
53、获得不含飞机磁干扰的有效值如下:
54、he=htotal-hd。
55、进一步地,该方法还包括:获取飞机在fom校准过程中的多个校准数据作为多个训练数据,其中每个训练数据包括在所述fom校准过程中由所述飞机搭载的三轴磁通门磁力仪采集的三分量数据中的沿笛卡尔坐标系的x轴和y轴的两个分量;其中,所述fom校准过程包括4个正交航向;其中,所述飞机为所述固定翼无人机主体,且该飞机搭载有所述三轴磁通门磁力仪;随机产生4个质心,作为所述4个正交航向各自初始的质心;针对每一个训练数据,对该训练数据进行分类,以获得该训练数据所属的航向类型,以及利用该训练数据重新计算其所属航向类型对应的质心;获取待处理的多个作业数据,其中,每个作业数据包括实际架次作业中由所述飞机搭载的三轴磁通门磁力仪采集的三分量数据中的沿笛卡尔坐标系的x轴和y轴的两个分量;按作业数据的采样顺序依次对各个作业数据进行分类,并将连续分到同一航向类型的多个作业数据作为该航向类型下的同一段作业数据;针对每个航向类型的每一段作业数据,利用该段作业数据中每个作业数据与该航向类型对应的质心之间的距离、按照采样顺序形成该段作业数据的距离向量,将该距离向量中出现的第一个极小值点和最后一个极小值点分别作为该段作业数据的起始点和截止点,以将该段作业数据缩短为从所述第一个极小值点至所述最后一个极小值点对应的数据段。
56、进一步地,对每个训练数据按照如下方式分类以获得该训练数据所属的航向类型:计算该训练数据与当前4个质心各自之间的距离,以及将该4个质心中与该训练数据之间距离最小的质心所对应的航向类型确定为该训练数据所属的航向类型。
57、无人机相比于有人机,由于必须具备自主飞行功能,因而无人机飞控需要知晓无人机的姿态信息。因此,在无人机航磁探测过程中,飞控模块本身就可以获取飞机的姿态信息,又在飞机上装备三分量磁力仪,这对于无人机空间是一种浪费。相比之下,本发明的航磁探测系统和方法,通过在固定翼无人机主体的机尾后部安装总场磁力仪,以及在固定翼无人机主体的机身腹部设置磁补偿器,将飞控模块的飞控姿态数据和总场磁力仪的磁总场数据发送给磁补偿器,以进行滑动均值滤波和航磁补偿,从而实现基于固定翼无人机的航磁探测,而不需安装三分量磁力仪,克服了现有技术的不足。
58、通过以下结合附图对本发明的最佳实施例的详细说明,本发明的这些以及其他优点将更加明显。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286644.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。