机器人关节伺服电机扭矩检测方法、检测装置、伺服电机、设备及存储介质与流程
- 国知局
- 2024-09-05 14:27:45
本发明涉及检测领域,尤其涉及一种机器人关节伺服电机扭矩检测方法、检测装置、伺服电机、设备及存储介质。
背景技术:
1、随着工业技术的发展,机器人已经广泛用于工业生产、探测、医疗服务等各个领域。用于工业生产和探测等领域的机器人,为了完成较为复杂的工作,需要有可以移动的机械臂,而使机械臂有较多自由度是通过机器人关节来实现的。
2、控制机器人关节的通常是伺服电机(servo motor),伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。为了更好的控制机器人关节的微小运动,需要准确的检测伺服电机的扭矩。检测机器人关节伺服电机的扭矩即检测伺服电机中的谐波减速器的扭矩。扭矩检测的准确性不仅影响机器人的运动性能,而且也关系到机器人是否能正确地执行任务。
3、现有技术中的扭矩检测方法采用超磁致伸缩材料涂层来检测扭矩,由于超磁致伸缩材料涂层需要直接喷涂在输出轴上,且无法提前预制,使用不够方便,成本高。且超磁致伸缩材料涂层现场喷涂,喷涂工艺参差不齐,而且超磁致伸缩材料涂层对温度、磁场较为敏感,使得对使用环境的要求高,而伺服电机本身发热,导致检测精度较低。此外,超磁致伸缩材料涂层需要正、反两个涂层,使得后续的配套部件复杂,也进一步推高了成本。
4、可见,现有技术中的扭矩检测方法结构复杂、精度不高且成本高。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本发明提供了一种机器人关节伺服电机扭矩检测方法、检测装置、伺服电机、设备及存储介质。
2、第一方面,本发明提供了一种机器人关节伺服电机扭矩检测方法,所述伺服电机包括谐波减速器和检测装置,所述谐波减速器包括输出轴及空心圆柱支架,所述输出轴设置在所述空心圆柱支架的内部,
3、所述检测装置包括:控制器、设置于所述输出轴上的非晶带材检测条、设置在所述空心圆柱支架上的励磁线圈和感应线圈,
4、所述方法包括:
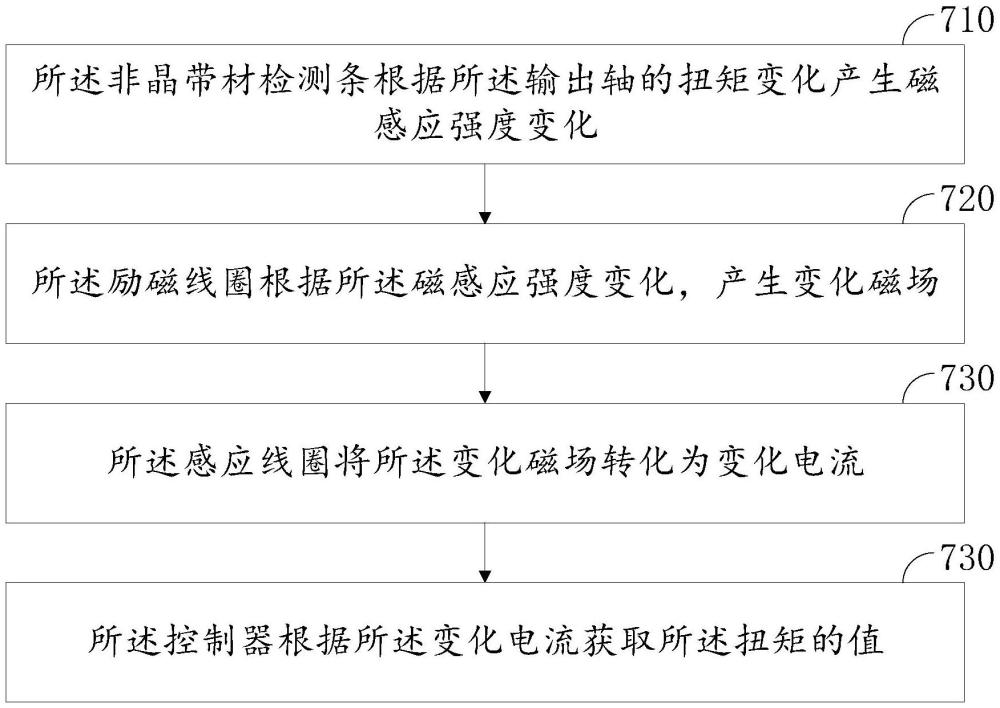
5、所述非晶带材检测条根据所述输出轴的扭矩变化产生磁感应强度变化;
6、其中,所述磁感应强度变化用于供所述励磁线圈产生变化磁场,
7、所述变化磁场用于供所述感应线圈产生变化电流,
8、所述变化电流用于供所述控制器获取所述扭矩的值。
9、可选的,所述非晶带材检测条黏贴在所述谐波减速器的所述输出轴上,且环绕所述输出轴一圈。
10、可选的,所述非晶带材检测条上包括刻痕,所述刻痕用于放大所述磁感应强度变化。
11、可选的,以任一通过所述输出轴的轴线的平面作为投影平面,以所述输出轴的轴线为x轴,以所述投影平面内垂直于所述x轴的线为y轴,
12、所述非晶带材检测条上包括第一纹路和第二纹路,所述第一纹路中包括多条第一刻痕,所述第二纹路中包括多条第二刻痕,
13、所述第一刻痕在所述投影平面上的投影为第一投影,多个所述第一投影平行,
14、每一个所述第一投影与所述x轴的夹角的角度为第一角度,多个所述第一角度相等,
15、所述第二刻痕在所述投影平面上的投影为第二投影,多个所述第二投影平行,
16、每一个所述第二投影与所述x轴的夹角的角度为第二角度,多个所述第二角度相等;
17、其中,所述第一角度和所述第二角度不相等。
18、可选的,所述输出轴包括第一端,
19、第一长度为任一所述第一刻痕上的任一点在所述投影平面上的投影点与所述第一端的距离,
20、第二长度为任一所述第二刻痕上的任一点在所述投影平面上的投影点与所述第一端的距离;
21、其中,所述第一长度小于所述第二长度。
22、可选的,一个所述第一角度与一个所述第二角度的和为180度。
23、可选的,所述第一角度为45度,或所述第二角度为45度。
24、可选的,所述输出轴的应力方向与所述x轴的夹角的角度为应力角度,
25、所述第一角度与所述应力角度相等,或
26、所述第二角度与所述应力角度相等。
27、可选的,所述励磁线圈和/或所述感应线圈缠绕在所述空心圆柱支架的外壁;或
28、所述励磁线圈和/或所述感应线圈设置在所述空心圆柱支架的内壁。
29、可选的,所述感应线圈和所述励磁线圈交错缠绕;或
30、所述感应线圈和所述励磁线圈分别缠绕;或
31、所述感应线圈缠绕在所述励磁线圈外部;或
32、所述励磁线圈缠绕在所述感应线圈的外部。
33、可选的,所述控制器包括信号检测电路、信号放大电路、滤波电路和信号处理电路,
34、所述非晶带材检测条根据所述输出轴的扭矩变化产生磁感应强度变化之前,所述方法还包括:
35、所述信号检测电路产生高频激励电信号,并将所述高频激励电信号传输至所述励磁线圈;
36、所述变化电流用于供所述控制器获取所述扭矩的值,包括:
37、所述信号检测电路接收所述感应线圈输出的所述变化电流,
38、所述信号放大电路放大所述变化电流,并输出放大后变化电流,
39、所述滤波电路滤去所述放大后变化电流中的杂波,并输出滤波后变化电流,
40、所述信号处理电路根据所述滤波后变化电流,获取所述扭矩的值。
41、可选的,所述信号处理电路根据所述滤波后变化电流,获取所述扭矩的值,包括:
42、所述信号处理电路获取第一时刻的第一电流;
43、所述信号处理电路获取第二时刻的第二电流;
44、所述信号处理电路获取所述第一电流和所述第二电流的差值;
45、所述信号处理电路根据所述差值以及所述非晶带材检测条的参数,获取所述第一时刻至所述第二时刻的所述扭矩的值。
46、第二方面,提供了一种机器人关节伺服电机扭矩检测装置,所述检测装置应用于所述伺服电机的谐波减速器,所述谐波减速器包括输出轴及空心圆柱支架,所述输出轴设置在所述空心圆柱支架的内部,所述检测装置包括:
47、非晶带材检测条,设置于所述输出轴上,用于根据所述输出轴的扭矩变化产生磁感应强度变化;
48、励磁线圈,设置在所述空心圆柱支架上,用于根据所述磁感应强度变化,产生变化磁场;
49、感应线圈,设置在所述空心圆柱支架上,用于将所述变化磁场转化为变化电流;
50、控制器,用于根据所述变化电流获取所述扭矩的值。
51、第三方面,提供了一种机器人关节伺服电机,所述伺服电机应用于上述的机器人关节伺服电机检测方法。
52、第四方面,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上任一项所述的方法。
53、第五方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的方法。
54、本发明提供了一种机器人关节伺服电机扭矩检测方法、检测装置、伺服电机、设备及存储介质,所述输出轴上设置有非晶带材检测条,所述方法包括:所述非晶带材检测条根据所述输出轴的扭矩变化产生磁感应强度变化;其中,所述磁感应强度变化用于供所述励磁线圈产生变化磁场,所述变化磁场用于供所述感应线圈产生变化电流,所述变化电流用于供所述控制器获取所述扭矩的值。本发明实施例中,非晶带材检测条黏贴在所述谐波减速器的输出轴上,当谐波减速器的输出轴上产生扭矩时,非晶带材的磁感应强度会发生变化。励磁线圈缠绕在空心圆柱支架上,输出轴设置在所述空心圆柱支架的内部,非晶带材料检测条黏贴在输出轴之上,相当于非晶带材检测条设置在励磁线圈内部,此时非晶带材检测条相当于磁芯。输出轴上产生扭矩,非晶带材检测条的磁感应强度变化,相当于励磁线圈内的磁芯的磁感应强度发生了变化,励磁线圈产生的磁场也相应会发生变化。感应线圈可以根据励磁线圈中变化磁场产生变化电流,通过检测变化电流,就可以获取输出轴上的扭矩的值。本发明实施例的方法,通过在输出轴上黏贴了非晶带材检测条,即可以检测出输出轴上的扭矩大小,而非晶带材对扭矩较为敏感,因此本发明实施例的方法精确度高。此外,非晶带材对温度敏感度较低,对于伺服电机工作时会发热的应用场合,也能保持较高的精确度。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286558.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。