一种双通道介入手术机器人的制作方法
- 国知局
- 2024-09-05 14:24:51
本发明属于医疗器械领域,尤其涉及一种双通道介入手术机器人。
背景技术:
1、心脑血管疾病是心脏血管和脑血管疾病的统称,泛指由于高脂血症、血液黏稠、动脉粥样硬化、高血压等所导致的心脏、大脑及全身组织发生的缺血性或出血性疾病。目前治疗心脑血管疾病非常有效的方法就是血管介入手术治疗,但是人工实施血管介入手术,医生穿着重达20公斤的铅衣暴露在x光线辐射下为患者进行手术,大大增加了医生的因x光辐射患癌风险及重达20公斤的铅衣引起的骨科相关职业病,因此在血管介入手术,迫切依赖主从式介入手术机器人(即包括主端和从端)来进行血管介入手术。
2、目前的主从式介入手术机器人,主要存在两方面的不足。一方面就是进行血管介入手术时,只能建立一条递送导丝、导管、球囊导管等细长型医疗器械的通道,面对许多复杂的病变,往往需要先回撤取走其中的一些器械,然后再使用现有的通道递送另外的细长型医疗器械到患者的病变处;另一方面就是回撤取走细长型医疗器械时,需要医生在主端操作控制从端回撤取走细长型医疗器械,不能做到自动回撤细长型医疗器械。
技术实现思路
1、本发明的目的在于提供一种双通道介入手术机器人,一方面旨在解决现有技术中只能建立一条递送细长型医疗器械的通道的技术问题。本发明提供解决这个技术问题的技术方案是这样:
2、一种双通道介入手术机器人,可设置于手术床旁用于血管介入手术,其特征在于,包括:第一机械臂,可安装在所述手术床的一侧;第一线性主体,安装在所述第一机械臂上;第一驱动装置、第二驱动装置、第三驱动装置及第四驱动装置,均可用于驱动细长型医疗器械,所述第一驱动装置固定安装在所述第一线性主体的远端,第二驱动装置、第三驱动装置及第四驱动装置依次滑动安装在所述第一线性主体上;所述第二驱动装置的远端处设有双翼止血阀,所述双翼止血阀包括内部均设有贯通管腔的主管体、第一翼体和第二翼体,所述主管体的管腔分别与所述第一翼体、第二翼体的管腔连通,形成可供细长型医疗器械通过的第一通道、第二通道。
3、进一步,还包括:第二机械臂,可安装在所述手术床的另一侧;第二线性主体,安装在所述第二机械臂上;第五驱动装置、第六驱动装置,均可用于驱动细长型医疗器械,依次滑动安装在所述第二线性主体上,所述第五驱动装置可滑动靠近或远离所述第二驱动装置的近端。
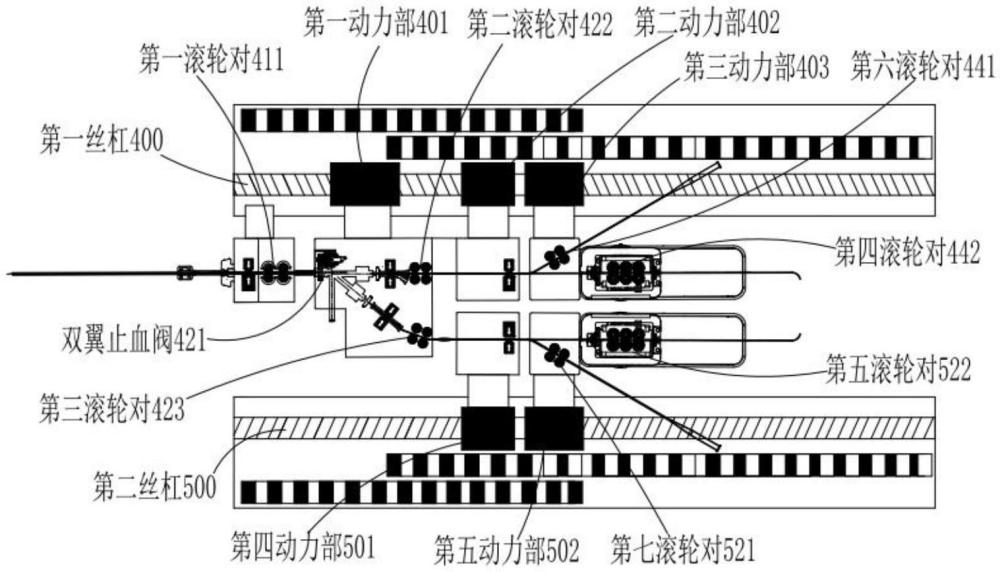
4、进一步,所述第一线性主体包括:第一丝杠,沿所述第一线性主体的长度方向固定安装在所述第一线性主体内;依次安装在所述第一丝杠上的第一动力部、第二动力部及第三动力部,分别与所述第二驱动装置、所述第三驱动装置及所述第四驱动装置连接,工作时,所述第一动力部、所述第二动力部及所述第三动力部均可在所述第一丝杠上来回滑动或静止。
5、进一步,所述第二线性主体包括:第二丝杠,沿所述第二线性主体的长度方向固定安装在所述第二线性主体内;依次安装在所述第二丝杠上的第四动力部及第五动力部,分别与所述第五驱动装置及所述第六驱动装置连接,工作时,所述所述第四动力部及所述第五动力部均可在所述第一丝杠上来回滑动或静止。
6、进一步,还包括:第一滚轮对、第二滚轮对、第三滚轮、第四滚轮对及第五滚轮对,均可用于夹持/移动细长型医疗器械,所述第四滚轮对及所述第五滚轮对还可用于转动细长型医疗器械;所述第一滚轮对设置在所述第一驱动装置的近端处;所述第二滚轮对、所述第三滚轮对分别靠近所述第一翼体、所述第二翼体的近端设置在所述第二驱动装置上;所述第四滚轮对、所述第五滚轮对分别大致设置在所述第四驱动装置、所述第五驱动装置的中间部分。
7、进步,还包括:第一检测装置,靠近所述第一滚轮对的远端设置在所述第一驱动装置上,与所述第一滚轮对、所述第一动力部信号连接;第二检测装置、第三检测装置,均设置在所述第二驱动装置上,所述第二检测装置位于所述第一翼体与所述第二滚轮对之间,分别与所述第二滚轮对、所述第二动力部信号连接,所述第三检测装置位于所述第二翼体与所述第三滚轮对之间,分别与所述第三滚轮对、所述第四动力部信号连接;第四检测装置,设置在所述第三驱动装置的远端处,与所述第二动力部、所述第四滚轮对均信号连接;第五检测装置,设置在所述第五驱动装置的远端处,所述第五检测装置与所述第四动力部、所述第五滚轮对均信号连接。
8、进一步,所述第一驱动装置的远端处还设有第一止血阀,所述第三驱动装置远端处还设有第二止血阀,所述第一止血阀、所述第二止血阀内部均设有贯通的管腔。
9、另一方面,本发明也解决了现有技术中不能自动回撤细长型医疗器械的技术问题。本发明提供的解决这个技术问题的一种技术方案:
10、一种双通道介入手术机器人,还包括:第一导管,尾端可转动地安装在所述第一止血阀的头端;第二导管,尾端可转动地安装在所述双翼止血阀的所述主管体的头端,部分夹持于所述第一滚轮对,再依次穿设于所述第一止血阀的管腔、所述第一导管,直至所述第二导管的头端露出所述第一导管的头端;第三导管,尾端可转动地安装在所述第二止血阀的头端,部分夹持于所述第二滚轮对,再依次穿设于所述第一通道、所述第二导管,直至所述第三导管的头端露出所述第二导管的头端;第一导丝,部分夹持于所述第四滚轮对,再依次穿设于所述第二止血阀的所述管腔、所述第三导管,直至所述第一导丝的头端露出所述第三导管的头端;
11、工作时,所述第一动力部、所述第二动力部及所述第三动力部静止在所述第一丝杠,所述第二滚轮对回撤所述第三导管回撤,所述第三导管逐渐弯曲收纳于所述第二驱动装置、所述第三驱动装置间,当所述第二检测装置检测不到所述第三导管,则控制所述第二滚轮对停止工作;
12、所述第一滚轮对回撤所述第二导管,所述第二导管逐渐弯曲收纳于所述第一驱动装置41、所述第二驱动装置间,当所述第一检测装置检测不到所述第二导管,则控制所述第一滚轮对停止工作。
13、本发明提供解决现有技术中不能自动回撤细长型医疗器械的技术问题另外一种技术方案:
14、一种双通道介入手术机器人,还包括:第六滚轮对,靠近所述第四滚轮对的远端设置在所述第四驱动装置上,所述第六滚轮对移动细长型器械时的路径与所述第四滚轮对移动细长型器械时的路径成锐角;第六检测装置,设置在所述第四驱动装置上,位于所述所述第六滚轮对的所述路径与所述第四滚轮对的所述路径的相交处,所述第六检测装置与所述第三动力部、所述第六滚轮对均信号连接。
15、进一步,还包括:第五导管,尾端可转动地安装在所述双翼止血阀的所述主管体的头端,部分夹持于所述第一滚轮对;第一球囊导管,前段上设有侧孔,部分夹持于所述第六滚轮对,依次放置于所述第三驱动装置、夹持于所述第二滚轮对,再依次穿设于所述第一通道、所述第五导管,直至所述第一球囊导管的头端露出所述第五导管的头端;第三导丝,部分夹持于所述第四滚轮对,从所述侧孔穿入第一球囊导管、放置于所述第三驱动装置,再依次穿设于所述第一通道所述第五导管,直至所述第三导丝的头端露出所述第一球囊导管的头端;
16、工作时,所述第六滚轮对驱动所述第一球囊导管回撤,当所述第六检测装置检测到所述侧孔,则控制所述第六滚轮对停止工作;再控制所述第三动力部开始工作,带动所述第四驱动装置回撤所述第一球囊导管,当所述第四检测装置检测不到所述第一球囊导管,则控制所述第三动力部停止工作。
17、本发明的有益效果是:一方面能适应只需要一条递送导丝、导管、球囊导管等细长型医疗器械的通道的简单病变,又能适应需要二条递送导丝、导管、球囊导管等细长型医疗器械的通道的复杂病变,增加了应用场景,提高了适用性,减少了复杂病变的手术时间;另一方面,可以自动检测导丝、导管、球囊导管等细长型医疗器械是否完成回撤及回撤时的弯曲收纳,提高了手术的安全性,也有效缩短了整体尺寸。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286307.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表