一种无人化钢铁抓取设备和方法与流程
- 国知局
- 2024-09-05 14:24:46
本发明涉及钢铁无人化抓取技术和检测控制领域,尤其涉及一种钢铁无人化抓取设备控制方法及系统。
背景技术:
1、目前,钢铁制造业以及钢铁回收产业的钢铁抓取设备需配置工作人员进行钢铁抓取设备的作业,配置人员较多,劳动负荷大,且钢铁硬度大,边角多为锋利状,存在较大安全隐患,采用人工搬运的方式不便于对钢铁堆料的实际形状和体积进行准确评估。
2、目前不同的作业设备,如不同钢铁抓取设备之间或钢铁抓取设备与装卸车辆之间不能进行协同配合工作,由于钢铁抓取设备的作业环境特殊,无法预先设置钢铁抓取设备运动路线,采用人工的方式不便于对不同钢铁抓取设备进行协同分工及路径规划,工作效率较低,且造成一定的安全隐患。
3、例如公开号为cn117428779a,公开日为2024-01-23,专利名称为《一种机器人抓取控制方法、装置、设备及存储介质》的公开文献,公开了一种机器人抓取控制方法、装置、设备及存储介质。包括:获取机器人工作场景的全局图像;通过预先构建的视角选择模型确定全局图像对应的最佳视角;根据最佳视角确定抓取目标,基于抓取目标控制机器人进行抓取。通过移动机器人至预设的全局拍照点位以获取机器人工作场景的全局图像,将全局图像处理后输入至视角选择模型即可确定出全局图像对应的最佳视角,然后控制机器人移动至最佳视角确定出抓取目标,最终控制机器人基于该抓取目标进行抓取,直到工作场景清空,通过视角选择模型缩短了视角选择时间,并且在最佳视角处可以进一步实现从杂乱堆叠的物体中选取抓取目标。
4、类似的抓取机器人设备难以适应先有得钢铁行业抓取需求,因此需要设计一种能够适用于钢铁领域的抓取机器人。
技术实现思路
1、本发明所要解决的技术问题是实现一种无人化钢铁抓取设备和方法,根据传感器参数信息能够无人化完成钢铁抓取,有效提高工作效率,自动化程度较高,降低安全隐患。
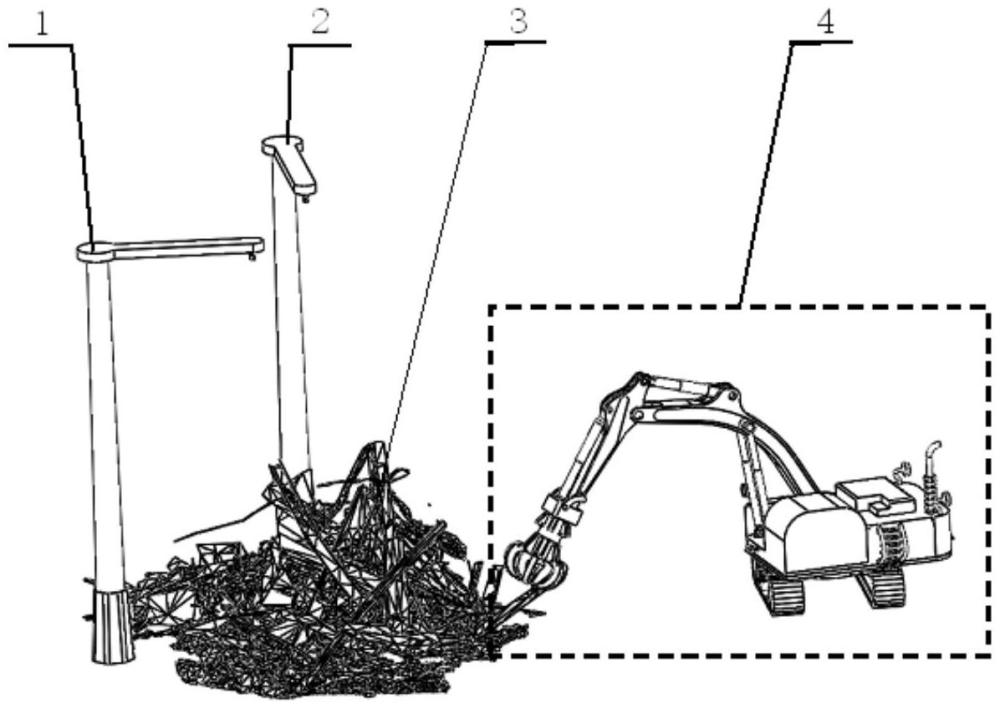
2、为了实现上述目的,本发明采用的技术方案为:一种无人化钢铁抓取设备,设备在钢铁堆区域的上方通过视觉传感器工作设备支架固定有视觉传感器工作设备,所述视觉传感器工作设备向下采集钢铁堆图像信息,所述视觉传感器连接并输出感应信号至数据集控中心,钢铁无人化抓取设备设有钢铁无人化抓取移动设备,所述钢铁无人化抓取移动设备上机械臂的末端设有钢铁抓取夹爪,所述钢铁无人化抓取移动设备上设有采集周围环境图像信息的摄像头,所述数据集控中心与钢铁无人化抓取设备通信。
3、所述视觉传感器工作设备设有两个,分别通过两个视觉传感器工作设备支架固定在钢铁堆区域的上方,所述视觉传感器工作设备支架的顶部设有侧向延伸的视觉传感器组合,所述视觉传感器组合的末端下表面固定有用于固定视觉传感器的视觉传感器支架。
4、所述钢铁无人化抓取移动设备是由移动履带,以及固定在移动履带上的4轴机械手臂构成,所述摄像头固定于4轴机械手臂的第1轴前端,用于观测钢铁无人化抓取设备在运动时,前方是否有障碍物。
5、一种无人化钢铁抓取方法,包括以下步骤:
6、步骤1、根据系统下达的任务,对目标位置进行定位,获取位置信息检测结果;
7、步骤2、将目标位置信息结果反馈至数据集控中心,根据所述目标位置信息检测结果进行路径规划,并根据路径规划结果,发出运动指令;
8、步骤3、根据所述运动指令,控制所述钢铁无人化抓取设备运行至相应区域进行作业;
9、步骤4、根据视觉传感器对目标区域进行视觉分块处理,获取目标区域分块检测结果,根据目标区域分块检测结果,发出控制指令;
10、步骤5、根据控制指令控制所述钢铁无人化抓取设备对所述目标区域分块检测结果进行分块抓取;
11、步骤6、作业完成后,反馈任务完成信息,完成钢铁无人化抓取设备控制。
12、所述步骤1、2中,获取任务信号,根据所述任务信号,检测目标位置位于场地的位置,并对目标位置标注相应的坐标,进而获取检测结果,并将坐标数据传输至数据集控中心,然后,数据集控中心根据所述检测结果进行路径规划。
13、所述路径规划步骤包括:
14、检测运行环境中,各个区域的位置信息,根据各个区域的位置信息构建基础地图;根据所述基础地图、所述任务信号中的目标位置和所述无人化抓取设备的当前位置,构建目标地图;基于所述基础地图和目标地图,获取行驶路径,进而获取路径规划结果。
15、所述步骤3中,控制所述钢铁无人化抓取设备沿所述已规划好的路径运行到所述目标位置:
16、所述钢铁无人化抓取设备在运行的过程中,位于钢铁无人化抓取设备上的摄像头同时进行工作,检测移动过程中,钢铁无人化抓取设备前方的障碍物位置信息,若检测出有障碍物,则钢铁无人化抓取设备立刻停止运动,并进行报警,若无则继续运动,直至到达相应的工作区域。
17、所述步骤4中,视觉传感器对目标区域进行视觉分块处理,获取目标区域分块检测结果的步骤包括:
18、根据视觉传感器工作设备a和视觉传感器工作设备b拍摄整体目标区域,并根据拍摄到的图片进行整合,整合出完整的目标图片,不遗漏任何死角,并将该目标图片进行图像分割,按照比例分割出与钢铁抓取夹爪一次抓取的量相匹配的区域,标记好相应的序号,以获取目标区域分块检测结果,并发出控制指令。
19、所述步骤5中,根据控制指令,控制所述钢铁无人化抓取设备对所述目标区域分块检测结果进行分块抓取的步骤包括:
20、根据控制指令,钢铁无人化抓取设备启动4轴机械手臂,按照标记好的区域分块序号进行逐一抓取,并通过视觉传感器工作设备检测抓取的目标区域是否抓取完毕,若检测该分块区域还有钢铁则钢铁无人化抓取设备继续对该区域的钢铁进行抓取;若检测到该抓取区域无钢铁,则继续抓取下一序号区域。
21、本发明钢铁无人化抓取设备通过对目标位置进行定位检测,根据所述位置信息检测结果进行路径规划,并根据路径规划结果,发出运动指令;在钢铁无人化抓取设备行驶过程中,摄像头实时观测形式过程中,钢铁无人化抓取设备的前方是否有障碍物;根据所述运动指令,控制所述钢铁无人化抓取设备运行到目标位置;根据视觉传感器对钢铁堆进行视觉分割并按照顺序进行标注序号,同时进行作业;完成所有抓取任务后,反馈任务完成信息;可实现对不同钢铁无人化抓取设备的进行协同作业,提高工作效率,自动化程度较高。
技术特征:1.一种无人化钢铁抓取设备,其特征在于:设备在钢铁堆区域的上方通过视觉传感器工作设备支架固定有视觉传感器工作设备,所述视觉传感器工作设备向下采集钢铁堆图像信息,所述视觉传感器连接并输出感应信号至数据集控中心,钢铁无人化抓取设备设有钢铁无人化抓取移动设备,所述钢铁无人化抓取移动设备上机械臂的末端设有钢铁抓取夹爪,所述钢铁无人化抓取移动设备上设有采集周围环境图像信息的摄像头,所述数据集控中心与钢铁无人化抓取设备通信。
2.根据权利要求1所述的无人化钢铁抓取设备,其特征在于:所述视觉传感器工作设备设有两个,分别通过两个视觉传感器工作设备支架固定在钢铁堆区域的上方,所述视觉传感器工作设备支架的顶部设有侧向延伸的视觉传感器组合,所述视觉传感器组合的末端下表面固定有用于固定视觉传感器的视觉传感器支架。
3.根据权利要求1所述的无人化钢铁抓取设备,其特征在于:所述钢铁无人化抓取移动设备是由移动履带,以及固定在移动履带上的4轴机械手臂构成,所述摄像头固定于4轴机械手臂的第1轴前端,用于观测钢铁无人化抓取设备在运动时,前方是否有障碍物。
4.一种无人化钢铁抓取方法,其特征在于,包括以下步骤:
5.根据权利要求4所述的无人化钢铁抓取方法,其特征在于:所述步骤1、2中,获取任务信号,根据所述任务信号,检测目标位置位于场地的位置,并对目标位置标注相应的坐标,进而获取检测结果,并将坐标数据传输至数据集控中心,然后,数据集控中心根据所述检测结果进行路径规划。
6.根据权利要求4所述的无人化钢铁抓取方法,其特征在于:所述路径规划步骤包括:
7.根据权利要求4所述的无人化钢铁抓取方法,其特征在于:所述步骤3中,控制所述钢铁无人化抓取设备沿所述已规划好的路径运行到所述目标位置:
8.根据权利要求4所述的无人化钢铁抓取方法,其特征在于:所述步骤4中,视觉传感器对目标区域进行视觉分块处理,获取目标区域分块检测结果的步骤包括:
9.根据权利要求4所述的无人化钢铁抓取方法,其特征在于:所述步骤5中,根据控制指令,控制所述钢铁无人化抓取设备对所述目标区域分块检测结果进行分块抓取的步骤包括:
技术总结本发明揭示了一种无人化钢铁抓取设备,设备包括:视觉传感器工作设备A、视觉传感器工作设备B、钢铁无人化抓取设备,所述视觉传感器工作设备A和视觉传感器工作设备B都是由视觉传感器工作设备支架和视觉传感器组合构成,本发明中的钢铁无人化抓取设备控制方法,通过任务指令对钢铁无人化抓取设备进行路径规划,进而控制所述钢铁无人化抓取设备运行到定位区域并进行作业,实现了对不同抓钢机的协调分工和运行路径优化,提高工作效率,自动化程度较高。技术研发人员:王永清,衣正尧,曹千里受保护的技术使用者:芜湖荻港荻利物资回收有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286299.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表