一种基于拉索振动频率的索力测试方法及系统与流程
- 国知局
- 2024-09-05 14:24:36
本发明涉及拉索索力检测,尤其涉及一种基于拉索振动频率的索力测试方法及系统。
背景技术:
1、拉索是悬索桥或斜拉桥的主要受力构件,拉索的内力测试是桥梁施工验收和评价桥梁健康运营状态的主要判断依据,因此,拉索的内力测试是桥梁施工与运营阶段的重要测试内容。拉索在受到张拉荷载时,其横向振动频率与张拉荷载(即拉索内力)存在固定的函数关系,当拉索内力无法直接测量时,检测拉索的自由振动频率成为拉索内力测量的主要方法。
2、目前,拉索的振动频率测试方法主要有接触式和非接触式两种测量方法,接触式测量方法是采用加速度或位移传感器直接测量索的振动时程曲线,从而计算拉索的振动频率,接触式测量方法需要将测量传感器装备至拉索上,测量过程复杂,且装备传感器相当于附加了一个质量块,这会影响拉索的原本的固有频率。而非接触式测量方法一般采用视觉测量方法,一种视觉测量方法首先在拉索上粘贴标记,通过追踪标记点的位移得到拉索的振动位移时程曲线,从而计算拉索的振动频率。这种方法必须在拉索上粘贴标记图案,对于悬索桥或斜拉桥而言,拉索接近桥面处容易粘贴标记图案,但此处振动噪声大,测量误差较大。拉索中间部分振动位移较两端明显,振动噪声对拉索振动位移影响小,但拉索中间部分较难粘贴标记图案。
3、而另一种基于计算机视觉的拉索索力测量方法则是利用边缘识别,这种方法首先对拉索边缘进行提取,然后根据拉索边缘的位移变化得到拉索的振幅,这种方法需要固定相机位置,且对于边缘提取精度较差,且在索边缘模糊时误差较大,测试环境较差时算法的适应性较差。因此,目前急需一种适应性更广、精度更高的拉索振动频率测试方法,从而更准确的测定拉索的索力。
技术实现思路
1、为解决上述问题,本发明提供了一种基于拉索振动频率的索力测试方法及系统,通过亚像素插值边缘检测获得拉索边缘的位置变化,计算拉索振动频率,从而利用拉索振动频率计算拉索索力,解决了现有拉索索力测试要求严格,精度低的问题。
2、为实现上述目的,本发明提供以下技术方案:
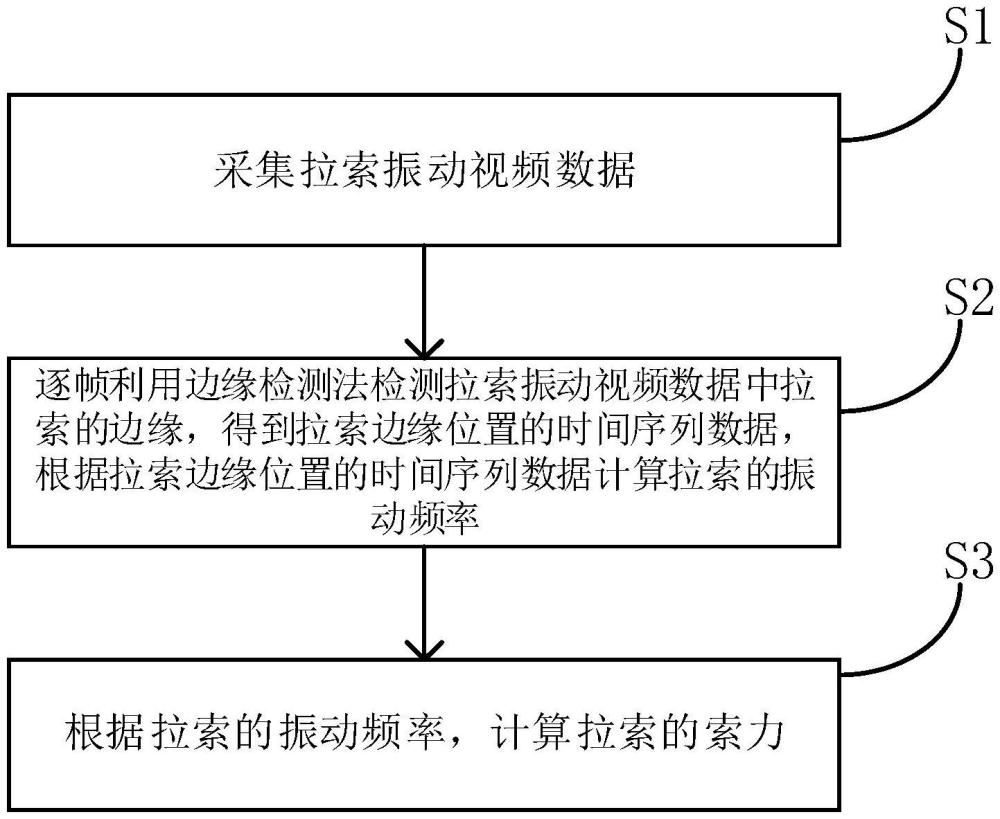
3、一种基于拉索振动频率的索力测试方法,包括以下步骤:
4、s1.采集拉索振动视频数据;
5、s2.逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,得到拉索边缘位置的时间序列数据,根据拉索边缘位置的时间序列数据计算拉索的振动频率;
6、s3.根据拉索的振动频率,计算拉索的索力。
7、进一步地,在步骤s2之前,还包括:将每帧拉索振动视频数据转化为灰度图,得到灰度拉索振动视频数据。
8、进一步地,在步骤s2中,所述逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,包括:在第一帧灰度拉索振动视频数据中,在第一位置生成一根线段,所述线段横跨拉索的边缘,计算线段上像素的灰度梯度,灰度梯度最大位置即为拉索边缘位置。
9、进一步地,在步骤s2中,计算线段上像素的灰度梯度,其具体实现过程为:
10、s21.所述线段的起点为(x1,y1),终点为(x2,y2),计算线段上像素的灰度值,得到线段灰度i={i1,i2,…,ii,…,in},其中,ii表示线段上第i个像素的灰度值;
11、s22.取一个正整数inter,对线段上的像素以1/inter为间隔进行样条插值,得到插值后的线段灰度i′,对i′计算灰度梯度f′,计算公式有:
12、f′i=i′i-i′i-1,
13、确定灰度梯度f′的最大值max(f′)=f′k,最大值所在的位置i′k即为拉索边缘位置。
14、进一步地,在步骤s2中,所述逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,还包括:
15、s23.根据前一帧灰度拉索振动视频数据边缘检测得到的拉索边缘位置,更新线段位置;
16、s24.对于第一帧以后每一帧灰度拉索振动视频数据,逐帧执行步骤s21-s23,直至所有灰度拉索振动视频数据都进行了边缘检测,得到第一拉索边缘位置的时间序列数据z={z1,z2,…,zm,…,zn},其中,zm表示第m帧中的第一拉索边缘位置。
17、进一步地,在步骤s2中,所述根据拉索边缘位置的时间序列数据计算拉索的振动频率之前,还包括:在第一帧灰度拉索振动视频数据中,在第二位置生成一根线段,所述线段横跨拉索的边缘,并执行步骤s21-s24,所述第二位置与第一位置之间的距离大于l/8,其中l为拉索的长度,得到第二拉索边缘位置的时间序列数据z′,定义振动幅值差时间序列数据为z″,其中,z″=z-z′。
18、进一步地,在步骤s2中,所述根据拉索边缘位置的时间序列数据计算拉索的振动频率,其具体实现过程包括:对于振动幅值差时间序列z″,存在以下公式:
19、
20、其中,ai为第一拉索边缘位置的振动幅值,aj′为第二拉索边缘位置的振动幅值,f1i为拉索第i阶主频,t为时间,为拉索的初始相位;
21、对于z″进行滤波后,再利用变分模态分解,计算得到z″的功率谱密度曲线,功率谱密度曲线的峰值对应的频率为拉索的一阶频率f。
22、进一步地,在步骤s3中,根据拉索的振动频率,计算拉索的索力,其具体实现过程包括:计算拉索索力t的公式为:
23、
24、其中,m为拉索的质量,l为拉索的长度,f为拉索的一阶频率,ei为拉索横截面抗弯刚度。
25、进一步地,在步骤s1中,所述拉索振动视频数据的采集频率大于拉索最大振动频率的五倍。
26、通过上述技术方案,与现有技术相比,其有益效果在于:对灰度图像进行插值,提高拉索边缘识别的精度,从而更准确的根据拉索边缘位置的时间序列数据检测拉索的振动频率,以根据振动频率对拉索拉力进行计算,提高了拉索拉力检测的准确度,并且,本方案相较现有技术的适用性更广泛,能够适应多种不同的检测环境。
技术特征:1.一种基于拉索振动频率的索力测试方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2之前,还包括:将每帧拉索振动视频数据转化为灰度图,得到灰度拉索振动视频数据。
3.根据权利要求2所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2中,所述逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,包括:在第一帧灰度拉索振动视频数据中,在第一位置生成一根线段,所述线段横跨拉索的边缘,计算线段上像素的灰度梯度,灰度梯度最大位置即为拉索边缘位置。
4.根据权利要求3所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2中,计算线段上像素的灰度梯度,其具体实现过程为:
5.根据权利要求4所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2中,所述逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,还包括:
6.根据权利要求5所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2中,所述根据拉索边缘位置的时间序列数据计算拉索的振动频率之前,还包括:在第一帧灰度拉索振动视频数据中,在第二位置生成一根线段,所述线段横跨拉索的边缘,并执行步骤s21-s24,所述第二位置与第一位置之间的距离大于l/8,其中l为拉索的长度,得到第二拉索边缘位置的时间序列数据z′,定义振动幅值差时间序列数据为z″,其中,z″=z-z′。
7.根据权利要求6所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s2中,所述根据拉索边缘位置的时间序列数据计算拉索的振动频率,其具体实现过程包括:对于振动幅值差时间序列z″,存在以下公式:
8.根据权利要求7所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s3中,根据拉索的振动频率,计算拉索的索力,其具体实现过程包括:计算拉索索力t的公式为:
9.根据权利要求1所述的一种基于拉索振动频率的索力测试方法,其特征在于,在步骤s1中,所述拉索振动视频数据的采集频率大于拉索最大振动频率的五倍。
10.一种基于拉索振动频率的索力测试系统,其特征在于,包括:
技术总结本发明公开了一种基于拉索振动频率的索力测试方法及系统,包括:采集拉索振动视频数据;逐帧利用边缘检测法检测拉索振动视频数据中拉索的边缘,得到拉索边缘位置的时间序列数据,根据拉索边缘位置的时间序列数据计算拉索的振动频率;根据拉索的振动频率,计算拉索的索力。本发明通过对灰度图像进行插值,提高拉索边缘识别的精度,从而更准确的根据拉索边缘位置的时间序列数据检测拉索的振动频率,以根据振动频率对拉索拉力进行计算,提高了拉索拉力检测的准确度,并且,本方案相较现有技术的适用性更广泛,能够适应多种不同的检测环境。技术研发人员:毛凤山,李金祥,吕述晖,廖李灿,刘介山受保护的技术使用者:中交第四航务工程局有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286288.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表