一种路面标线快速去除微波移动装置及基于该装置的标线去除方法与流程
- 国知局
- 2024-09-05 14:24:51
本发明涉及路面标线去除设备,尤其涉及一种路面标线快速去除微波移动装置及基于该装置的标线去除方法,。
背景技术:
1、道路标线是指在道路的路面上用线条、箭头、文字、立面标记、突起路标和轮廓标等向交通参与者传递引导、限制、警告等交通信息的标识,包括热熔标线,常温冷漆标线,彩色防滑标线,振荡防滑反光标线和预成型标线,其作用是管制和引导交通,可以与标志配合使用,也可单独使用。
2、如果道路标线需要更换或更改时,就需要将原有的标线去除,现有道路除线装置如公告号cn112609551a,名为一种道路标线磨除装置,其包括车体和壳体,车体侧面设置有放置架,放置架侧面滑动设置有壳体,壳体内部依次设有除线机构、清扫机构和喷淋机构,放置架上方依次固定有水箱和集尘箱,放置架下方设有烘干机构和喷漆机构,水箱的内部固定有水泵,水泵的出水端连接有出水管,集尘箱上方设有吸风机,吸风机的进风端连接有吸尘管,吸尘管的末端连接有进风罩。
3、但是,现有的道路标线去除设备采用磨除的方式来破坏标线与路面之间的粘聚力,这类方法能耗大、效率低,且对原有路面造成破坏,存在环境污染,影响路面美观度。
4、为此,现亟需一种新型的路面标线快速去除微波移动装置及基于该装置的标线去除方法。
技术实现思路
1、发明目的:本发明的目的在于提供一种采用微波加热的方式以快速去除路面标线的装置和方法。
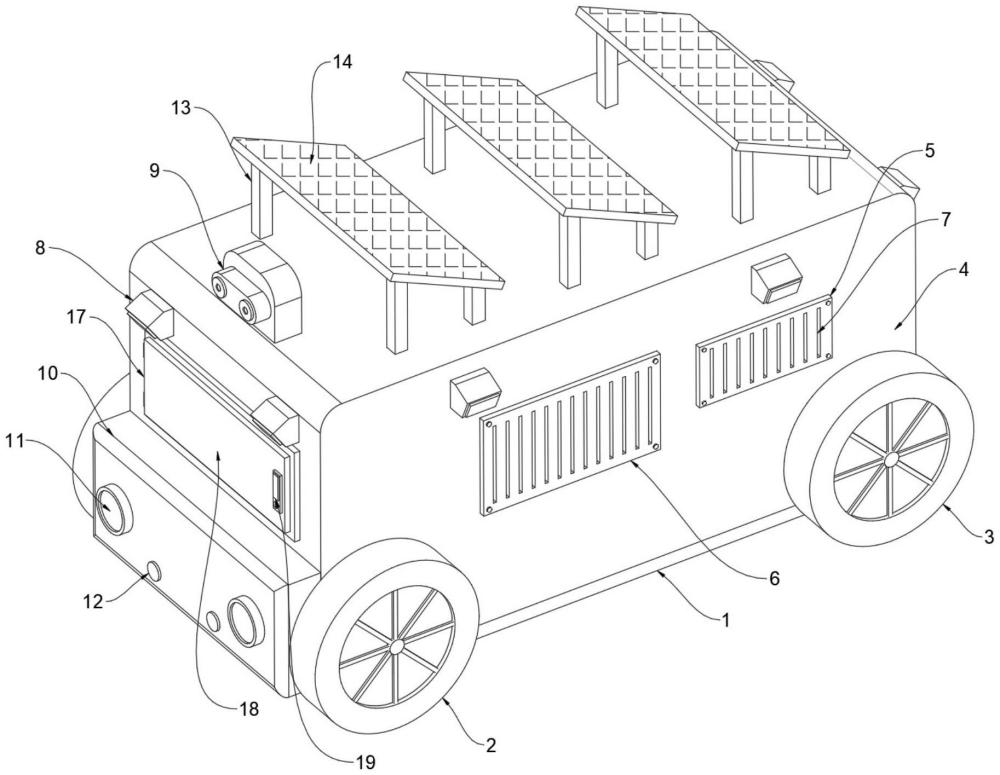
2、技术方案:本发明的路面标线快速去除微波移动装置,包括底盘,设于底盘前端两侧的主动轮,设于底盘后端两侧的从动轮,罩设于底盘上的车壳,车壳和底盘所构成的前端空腔作为工作腔,该工作腔的后端作为电源腔;
3、所述工作腔的内部设置有微波加热罩,该微波加热罩内嵌于底盘的内部,微波加热罩上端设有微波发生器,微波加热罩下端内嵌有微波限位框,该微波限位框内壁的一侧安装有柔性折叠垫,所述柔性折叠垫的一端设置有铝制传动板,该微波限位框的后端安装有双向导轨,且微波限位框与双向导轨的内腔相连通,微波限位框内壁的上端设置有导槽,所述铝制传动板的上端通过导块与导槽滑动连接;
4、所述双向导轨的内部设有正向丝杆和反向丝杆,铝制传动板分别与正向丝杆和反向丝杆相连接,以实现两者的相向或背向运动。
5、进一步说,该装置还包括伺服电机,其安装在所述主动轮的轮轴上,且伺服电机的输出端与主动轮的轮轴传动连接;控制室,其安装在所述车壳前端的内部,该控制室的内部安装有中央处理器,该中央处理器内置图像处理模块和gps定位导航模块。
6、进一步说,该装置还包括支撑台,其安装在电源腔的内部,该支撑台的上端安装有电源模块,所述车壳的上方设置有光伏太阳能板,从动轮的轮轴上安装有发电机,光伏太阳能板和发电机的输出端与电源模块的输入端电性连接。
7、进一步说,该装置还包括铲板,其安装在底盘下端的后方,且铲板通过弹簧减震组件与底盘连接。
8、进一步说,该装置的双向导轨的一端安装有步进电机,且步进电机的输出端与正向丝杆传动连接;正向丝杆的一端与逆向丝杆固定连接,且正向丝杆与逆向丝杆的连接处设有中心轴承片,所述正向丝杆与逆向丝杆上均安装有滑块,通过该滑块分别与两侧的铝制传动板传动连接。
9、进一步说,该装置的车壳的外壁四周均安装有激光雷达,车壳前端的下方安装有灯座,灯座前端的两侧均安装有照明灯,照明灯的内部设置有光照度传感器,灯座前端的中部和车壳的尾部均安装有超声波雷达,车壳前端的上方安装有双目摄像头。
10、进一步说,该装置的车壳后端的内部安装有排风扇,所述排风扇的外壁上安装有防护网,所述排风扇的前端安装有抽风管,抽风管的一端延伸至微波发生器的上端,所述电源模块的上端设置有第一分支管,该第一分支管的上端均与抽风管相连通。
11、进一步说,该装置的电源腔的两侧设置有第一散热板框,工作腔的两侧设置有第二散热板框,所述第一散热板框和第二散热板框的内部均设置有多个条形散热槽。
12、进一步说,该装置的底盘的内部设有红外温度传感器,且红外温度传感器的检测端朝向路面。
13、本发明基于上述路面标线快速去除微波移动装置进行标线去除的方法,包括以下步骤:
14、(1)根据gps定位导航模块指定道路标线清除路线,由中央处理器基于路线反馈信号至车体伺服电机,基于伺服电机控制主动轮旋转,并配合从动轮控制车体移动,使其沿指定路线自动行进;
15、(2)行进过程中,位于车身周边的激光雷达配合前后端的超声波雷达,可对周边障碍物进行实时检测,并将检测数据及时回传至中央处理器,由中央处理器基于障碍物位置控制车体自动避让;
16、(3)待到达标线位置后,双目摄像头可将路面信息回传至中央处理器,中央处理器基于图像处理模块对标线位置以及形状进行处理分析,调节微波限位框的宽度从而调节微波抑制范围以控制微波泄漏量,同时中央处理器基于标线位置信息控制车体精准沿路面标线移动;
17、(4)移动过程中,由中央处理器根据双目摄像头反馈的标线长度,控制微波发生器运行,由微波发生器发射微波,使微波沿微波加热罩辐射至标线上,利用微波加热标线下的微波吸收层;
18、(5)加热过程中,通过红外温度传感器测试标线表面温度,由标线表面温度反馈微波吸收层的大概温度,从而由中央处理器控制车体移动的前进速度,使标线表面温度达到能够清除的温度;
19、(6)随着车体继续前进,利用底盘尾部的铲板对软化后的标线进行铲除。
20、有益效果:与现有技术相比,本发明的显著优点为:
21、1、本发明主要是通过在车体上搭载微波发生系统,利用吸波层、标线以及沥青混合料三者间的吸波能力之间的差异,对吸波层进行微波加热,而标线和沥青混合料的温度变化明显小于吸波层,从而三者间产生温度差异,当吸波层到达软化点时,标线和沥青混合料还处于固体状态,此时标线与沥青混合料之间的粘结性变低,再使用机械方法铲除标线,从而大大降低了对沥青混合料的破坏。
22、2、本发明通过在微波加热罩下方设置可调式微波限位框,当设备到达标线位置后,双目摄像头可将路面信息回传至中央处理器,中央处理器基于图像处理模块对标线位置以及形状进行处理分析,基于标线宽度的反馈,调节微波限位框处的步进电机,由步进电机控制正向丝杆和逆向丝杆同步旋转,带动两组滑块上的铝制传动板对向移动,随着铝制传动板的移动牵引拉伸柔性折叠垫遮盖在微波限位框两侧,从而调节微波抑制范围,以控制微波泄漏量,提升后续清除效果。
23、3、本发明采用无人式小车实现自动化道路标线清除工作,根据gps定位导航模块指定道路标线清除路线,由中央处理器基于路线反馈信号至车体伺服电机,由双电机差速系统控制车体前驱运行,沿指定路线自动行进,行进过程中,位于车身周边的激光雷达配合前后端的超声波雷达,可对周边障碍物进行实时检测,并将检测数据及时回传至中央处理器,由中央处理器基于障碍物位置控制车体自动避让,待到达标线位置后,双目摄像头可将路面信息回传至中央处理器,中央处理器基于图像处理模块对标线位置进行处理分析,并控制车体精准沿路面标线移动,大幅降低了人力消耗。
24、4、通过在车壳的上方设置三组光伏太阳能板,并且车体采用前驱的运行方式,后轮轮轴处连接发电机转子,运行时光伏太阳能板能够将光能转换为电能,而位于车辆后端的从动轮主要配合前端主动轮转动,过程中从动轮轮轴能够带动发电机转子旋转,以产生电能,两种发电方式协同运作,共同通过逆控一体机供应至电源模块,大幅降低了车辆能耗。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286305.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表