一种分拣机器人重力驱动卸货结构及分拣机器人
- 国知局
- 2024-08-30 15:08:34
本发明一种分拣机器人重力驱动卸货结构及分拣机器人涉及一种安装在分拣机器人上的卸货结构,属于智能物流,特别涉及一种通过多个挡板沿着滑轨移动以存放不同数量的快递包裹,并对快递包裹进行支撑和防护,能够减少快递包裹的滑落,通过多个第三伸缩杆伸展的高度不同,使承接板倾斜向下,快递包裹在重力作用和滚珠的滚动作用下掉落入装车车辆,能够提高快递包裹的转运效率的卸货结构。
背景技术:
1、随着社会的发展,网购已经成为消费者的主要购物方式,在将快递包裹从始发地发往目的地的过程中,需要根据目的地的不同将快递包裹分拣堆放至多个不同的分拣口,然后通过小推车等移动装置将不同分拣口堆放的快递包裹运送到该分拣口对应的快递包裹装车点,实现快递包裹的转运。目前将分拣口堆放的快递包裹分拣至小推车上的方式主要是以人工为主,但人工效率低、劳动强度高,且需要在不同的分拣口安排不同的工作人员,人工成本高,因此分拣机器人应运而生。同一个分拣机器人能够同时兼顾多个分拣口,在预设的时间间隔后,按照预设的行进路线从一个分拣口移动至另一个分拣口,将不同分拣口的快递包裹分拣至对应的小推车上,分拣效率高,人工成本低。现有的分拣机器人的行走底座一般为前后各两个轮胎的结构,其中两个轮胎是负责行走,其它两个轮胎负责转向,转向时机身和行进方向的偏转角大,容易发生侧滑,在从一个分拣口移动至另一个分拣口时不能实现原地掉头返回,不适用于狭窄路面和空间有限的仓库;且重心较高,没有设置减震装置,从一个分拣口移动至另一个分拣口的过程中,遇到凹凸不平的地面时,会受到反复的硬撞击而上下弹跳,容易造成分拣机器人的磨损,影响行进速度;同时现有的分拣机器人一般置有通过手抓式机械夹爪将快递包裹从堆放点移动至小推车上,对于尺寸较小的快递包裹,能够轻松夹住并移动,对于尺寸较大的快递包裹,手抓式机械夹爪无法有效地夹住快递包裹或者是只能夹住快递包裹的一部分,夹持力较小,可能导致快递包裹的掉落,造成快递包裹的损坏,降低分拣效率;且现有的分拣机器人是将同一个分拣口的所有不同尺寸的快递包裹移动至同一个小推车内,大尺寸的快递包裹堆叠在小尺寸的快递包裹上,容易造成小尺寸快递包裹的损坏,小推车的空间利用率低。
2、公开号cn117484470a公开了移动式协作机器人,包括机械手,还包括移动底盘和摄像头,所述移动底盘包括底座以及驱动机构,所述机械手安装于底座上,所述驱动机构用于驱使底座移动;所述机械手至少有一段在抓取快递时相对水平面形成<60°的夹角,且该段称为横展臂;所述摄像头活动安装于机械手的横展臂,且用于对机械手的斜下方进行拍摄;所述底座上安装有控制模块,所述控制模块电连接于摄像头、驱动机构以及机械手。上述移动式协作机器人的驱动机构是履带式结构,行驶速度慢,和地面的接触面积大,摩擦力大,转向困难,不能实现原地掉头,灵活性差,不适用于狭窄路面和空间有限的仓库;且重心较高,没有设置减震装置,在遇到凹凸不平的地面时,会受到反复的硬撞击而上下弹跳,容易造成分拣机器人所移动的快递包裹的掉落,影响快递包裹的安全分拣;同时上述移动式协作机器人的机械手是模拟人手的方式抓取快递包裹,对于尺寸较小的快递包裹,能够轻松夹住并移动,对于尺寸较大的快递包裹,手抓式机械夹爪无法有效地夹住快递包裹或者是只能夹住快递包裹的一部分,夹持力较小,在将快递包裹移动至对应的容器的过程中,可能导致快递包裹的掉落,造成快递包裹的损坏,降低分拣效率。
3、为了改善上述问题,申请人另案提出了名称为《一种分拣机器人》的中国发明专利申请,首先通过分拣机器人将不同分拣口的快递包裹分拣至对应的小推车或者托盘等移动装置上,当移动装置满载时,再通过人工或者叉车将该移动装置运送至该分拣口对应的快递包裹装车点,实现快递包裹的转运。上述移动装置到达装车点后,还需要通过人工将其上的包裹逐个拿出后再向车厢内递送进行堆叠码垛,费时费力,移动装置需等待所有的包裹都被拿出后才能够回到分拣口继续存放包裹,单个移动装置的利用率低,转运效率低。
技术实现思路
1、为了改善上述情况,本发明一种分拣机器人重力驱动卸货结构及分拣机器人提供了一种通过多个挡板沿着滑轨移动以存放不同数量的快递包裹,并对快递包裹进行支撑和防护,能够减少快递包裹的滑落,通过多个第三伸缩杆伸展的高度不同,使承接板倾斜向下,快递包裹在重力作用和滚珠的滚动作用下倾倒至装车车辆内,能够提高快递包裹的转运效率的卸货结构。
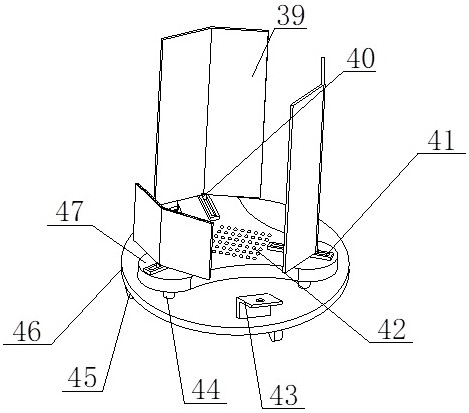
2、本发明一种分拣机器人重力驱动卸货结构及分拣机器人是这样实现的:本发明一种分拣机器人重力驱动卸货结构由挡板、滑块、滑轨、滚珠、牵引连接件、第三伸缩杆、万向轮、底盘以及承接板组成,
3、底盘的顶面可转动地置有牵引连接件,所述牵引连接件靠近所述底盘的顶面边缘,所述牵引连接件上开有连接孔,
4、所述底盘的底面置有万向轮,所述万向轮靠近所述底盘的底面边缘,
5、优选的,所述万向轮有多个,多个所述万向轮沿所述底盘的底面周向等距排列,
6、承接板位于所述底盘的正上方,
7、所述承接板为三角形结构,所述承接板的边缘为弧形结构,
8、所述承接板和所述底盘之间置有第三伸缩杆,所述第三伸缩杆的一端铰接置于所述底盘的顶面,所述第三伸缩杆的另一端铰接置于所述承接板的底面,
9、优选的,所述第三伸缩杆有三个,三个所述第三伸缩杆分别和承接板的三个角一一对应,
10、优选的,所述承接板为中空结构,
11、优选的,所述承接板内填充有海绵和泡沫颗粒的混合物,
12、优选的,所述承接板的高度由中心至边缘逐渐增大,
13、优选的,所述承接板和所述底盘之间置有多个减震弹簧,所述减震弹簧的一端置于所述底盘的顶面,所述减震弹簧的另一端置于所述承接板的底面,靠近所述承接板中心的所述减震弹簧的密度大于靠近所述承接板边缘的所述减震弹簧的密度,
14、优选的,所述承接板的顶面置有柔性垫片,
15、所述承接板的底面置有压力传感器,
16、所述承接板的顶面每个角分别对应置有滑轨,所述滑轨为两端封闭的结构,
17、所述承接板的顶面除所述滑轨以外的部位均匀地内嵌有多个滚珠,
18、挡板的一侧边中部置有滑块,所述滑块和所述滑轨相对应,所述挡板通过所述滑块配合所述滑轨可滑动地置于所述承接板的顶面,所述滑块和所述滑轨之间通过紧固螺栓固定,
19、所述挡板的中部为弯折结构,多个所述挡板可首尾拼接在一起,
20、优选的,所述挡板的一侧边中部和所述滑块为转动连接,
21、优选的,所述挡板的弯折部为弧形结构,
22、优选的,所述挡板除弯折部以外为中空结构,
23、优选的,所述挡板的厚度由中部至两端逐渐减小,
24、优选的,所述挡板的侧面置有凸起颗粒,所述凸起颗粒为半球形结构,所述凸起颗粒有多组,多组所述凸起颗粒沿所述挡板的长度方向交错等距排列,每一组内的所述凸起颗粒有多个,多个所述凸起颗粒沿所述挡板的宽度方向等距排列;
25、进一步的,所述挡板的侧面置有防滑垫,所述防滑垫为双层结构,所述防滑垫从和挡板连接的一面至另一面依次为橡胶层和海绵层;
26、进一步的,所述挡板包括第一挡板和第二挡板两部分,所述第一挡板和所述第二挡板之间置有支撑轴,所述支撑轴的一端置于所述滑块上,所述支撑轴的另一端和所述挡板的另一侧相齐平,所述第一挡板的一端和所述第二挡板的一端分别可转动地置于所述支撑轴的侧面,合页的中部置于所述支撑轴的侧面,合页的一侧置于所述第一挡板上,合页的另一侧置于所述第二挡板上,
27、优选的,所述合页有多个,多个所述合页沿所述支撑轴的长度方向等距排列;
28、本发明还涉及一种分拣机器人,所述一种分拣机器人包括行走机构、转动机构以及夹取机构,
29、所述行走机构由圆盘车壳、第一转轴、轮胎、驱动电机放置壳、u形连接件、第一铰接件、第一伸缩杆、第二铰接件、连接杆、减震垫片、第二伸缩杆以及弹簧、阻尼器组成,
30、圆盘车壳的侧面开有连接槽,所述连接槽的槽口和所述圆周车壳的侧面相齐平,
31、优选的,所述圆盘车壳为中空结构,所述圆盘车壳内非饱和填充有流体;
32、优选的,所述连接槽有多个,多个所述连接槽沿所述圆周车壳的侧面周向等距排列,
33、连接杆的一端置于所述连接槽的槽底中部,连接杆的另一端通过第二铰接件可转动地置于u形连接件的一端,
34、所述连接杆的两侧分别对应置有第一伸缩杆,第一伸缩杆的一端置于所述连接槽的槽底,第一伸缩杆的另一端分别通过第一铰接件对应可转动地置于所述u形连接件一端的侧面,
35、所述u形连接件的两侧面之间置有驱动电机放置壳,所述驱动电机放置壳的一端置于所述u形连接件一端的内侧面,驱动电机置于所述驱动电机放置壳内,
36、所述驱动电机放置壳的顶面和底面分别对应置有一组阻尼器的一端,第二伸缩杆的一端置于所述阻尼器的另一端,第二伸缩杆的另一端分别通过减震垫片对应置于所述u形连接件的两内侧面,
37、弹簧套置于所述第二伸缩杆的侧面,
38、优选的,同一组内的所述阻尼器有多个,多个所述阻尼器沿所述驱动电机放置壳的长度方向等距排列,
39、优选的,所述驱动电机放置壳的顶面和底面分别对应置有橡胶柱的一端,所述橡胶柱的另一端分别对应置于所述u形连接件的两内侧面,所述橡胶柱有多个,多个所述橡胶柱沿所述驱动电机放置壳的长度方向等距排列,所述橡胶柱和所述阻尼器呈交错排列,
40、第一转轴的一端穿过所述驱动电机放置壳另一端开有的通孔和所述驱动电机的电机轴相连接,所述第一转轴和所述驱动电机放置壳之间置有轴承,
41、第一转轴的另一端和轮胎的轮轴相连接,
42、优选的,所述行走机构上还设置有探测机构,所述探测结构由第一摄像头、固定盘以及支撑杆组成,
43、支撑杆置于所述圆盘壳体的顶面,
44、固定盘的底面置于所述支撑杆的顶面,第一摄像头置于所述固定盘的顶面,
45、所述转动机构由固定底板、第一连接臂、第二连接臂、第三连接臂、第四连接臂以及旋转电机放置壳组成,
46、第一连接臂的一端通过固定底板和所述圆盘车壳的顶面转动连接,
47、第二连接臂的一端和所述第一连接臂的另一端转动连接,第二连接臂的另一端和第三连接臂的一端转动连接,第三连接臂的另一端和第四连接臂的一端相连接,第二连接臂的一端的高度小于另一端的高度,
48、旋转电机放置壳内嵌于所述第四连接臂的另一端开有的通槽内,旋转电机置于所述旋转电机放置壳内,
49、所述夹取机构由连接轴、固定套、连接板、吸盘、第二摄像头、真空抽泵、第一钩爪连接件、第二钩爪连接件、夹爪、气缸、夹爪连接臂以及推臂组成,
50、第二转轴的一端穿过所述旋转电机放置壳开有的通孔和所述旋转电机的电机轴相连接,所述第二转轴和所述旋转电机放置壳之间置有轴承,
51、第二转轴的另一端和固定套相连接,
52、所述固定套通过中部开有的通孔套置于连接轴的侧面,所述连接轴的一端置于真空抽泵上,连接板置于真空抽泵上,吸盘置于连接板上,连通管的一端和真空抽泵的出气口相连接,且相连通,连通管的另一端穿过所述连接板上开有的通孔和所述吸盘相连接,且相连通,
53、第二摄像头置于所述连接板的底面,测距传感器置于所述连接板的底面,
54、所述连接轴的另一端置于气缸的一端,
55、推臂的一端可滑动地置于所述气缸内,推臂的另一端置有第二钩爪连接件,
56、第一钩爪连接件通过中部开有的通孔套置于所述推臂的侧面,所述第一钩爪连接件的长度大于所述第二钩爪连接件的长度,
57、所述第一钩爪连接件的两端分别对应铰接置有夹爪的一端,所述第二钩爪连接件的两端分别对应铰接置有夹爪连接臂的一端,夹爪连接臂的另一端分别对应铰接置于所述夹爪的三分之一处,
58、两个所述夹爪的另一端的延长线和所述推臂的另一端的延长线相重合,
59、优选的,所述夹爪的另一端侧面等距开有多个防滑纹,
60、优选的,所述分拣机器人通过一种分拣机器人转向系统控制转向;
61、本发明还涉及一种分拣机器人转向系统,其特征在于,所述分拣机器人转向系统由行速传感器、行向传感器、中央处理器和中央控制器组成,所述行速传感器通过数据线和所述中央处理器相连接,所述行向传感器通过数据线和所述中央处理器相连接,所述中央控制器通过数据传输线和两个所述第一伸缩杆相连接,所述中央处理器将数字信号转化为电信号,所述分拣机器人转向系统被执行时实现以下步骤:
62、所述行速传感器采集分拣机器人行驶的速度,将实时信号传递给所述中央处理器,当所述分拣机器人转向时,所述行向传感器将期望信号传递给所述中央处理器,所述中央处理器通过对比期望信号和实时信号,计算出偏差,根据偏差量实时调整控制两个所述第一伸缩杆的伸缩长度,使两个所述第一伸缩杆出现长度差,两个所述第一伸缩杆带动所述u形连接件转向,所述u形连接件带动所述驱动电机转向,所述驱动电机带动所述轮胎转向,实现分拣机器人转向的目的。
63、优选的,所述分拣机器人通过一种分拣机器人转动系统控制连接臂的转动;
64、本发明还涉及一种分拣机器人转动系统,其特征在于,分拣机器人转动系统由测距传感器、中央处理器和中央控制器组成,所述测距传感器通过数据线和所述中央处理器相连接,所述中央处理器通过数据线和所述中央控制器相连接,伺服电机通过数据线和所述中央控制器相连接,伺服电机通过齿轮传动装置分别和第一连接臂、第二连接臂、第三连接臂相连接,所述中央处理器将数字信号转化为电信号,所述分拣机器人转动控制系统被执行时实现以下步骤:
65、所述测距传感器采集夹爪或者吸盘到目标位置的距离,将实时信号传递给所述中央处理器,所述中央处理器对比距离数据和预设距离,计算出夹爪或者吸盘和目标位置之间的偏差,发送中央控制器,中央控制器根据距离偏差进行路径规划,确定夹爪或者吸盘从当前位置到目标位置的最佳路径,计算第一连接臂、第二连接臂、第三连接臂的角度和位置,以确保第一连接臂、第二连接臂、第三连接臂能够按照预定路径进行运动,根据计算结果,中央控制器向伺服电机发送指令,伺服电机驱动第一连接臂、第二连接臂、第三连接臂进行运动,在运动过程中,中央控制器会不断接收来自测距传感器的反馈信息,并根据这些信息对第一连接臂、第二连接臂、第三连接臂的运动进行实时调整,以确保其按照预定路径进行精确运动,到达目标位置后,且夹爪或者吸盘对快递包裹进行稳定抓取后,第一连接臂、第二连接臂、第三连接臂再按照预定路径将不同尺寸的快递包裹分拣到对应的小推车内,在快递包裹被成功分拣后,中央控制器会确认任务已完成,并向伺服电机发送指令,伺服电机驱动第一连接臂、第二连接臂、第三连接臂进行反向运动,回到初始位置,进行下一个快递包裹的分拣,如此周而复始,对每个分拣口的快递包裹进行分拣。
66、优选的,所述一种分拣机器人还包括一个控制系统,所述控制系统包括信号转换器、数据处理器和控制器,
67、所述信号转换器置于所述圆盘车壳上,所述数据处理器置于所述圆盘车壳上,所述控制器置于所述圆盘车壳上,
68、所述第一摄像头、所述第二摄像头、所述压力传感器通过数据线和所述信号转换器相连接,
69、所述驱动电机、所述旋转电机、所述真空抽泵、所述气缸、所述第三伸缩杆分别通过数据传输线和所述控制器相连接,
70、所述信号转换器通过数据传输线和所述数据处理器相连接,所述数据处理器通过数据传输线和所述控制器相连接,
71、所述信号转换器能够将所述第一摄像头、所述第二摄像头采集到的图像数据的电信号转化为数字信号,所述信号转换器能够将所述压力传感器采集到的压力数据的电信号转化为数字信号,
72、所处控制器可以被一个或至少两个应用专用集成电路(asic)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、控制器、微控制器、微处理器或其他电子组件实现,用于执行数据处理装置的指令,
73、所述数据处理器和所述信号转换器进行信息交互,
74、所述控制系统被执行时主要实现以下步骤:
75、在使用分拣机器人分拣快递包裹前,控制系统提前预设通过夹爪将小尺寸的快递包裹夹取至1号小推车内,通过吸盘将大尺寸的快递包裹吸附至2号小推车内,
76、在使用分拣机器人分拣快递包裹时,控制器控制驱动电机控制,驱动电机带动第一转轴转动,第一转轴带动轮胎转动,使分拣机器人根据预设的行进路线开始直线行驶,行速传感器采集分拣机器人行驶的速度,将实时信号传递给中央处理器,当分拣机器人转向时,行向传感器将期望信号传递给中央处理器,中央处理器通过对比期望信号和实时信号,计算出偏差,根据偏差量实时调整两个第一伸缩杆的伸缩长度,使两个第一伸缩杆出现长度差,两个第一伸缩杆带动u形连接件转向,u形连接件带动驱动电机转向,驱动电机带动轮胎转向,实现分拣机器人转向的目的;分拣机器人按照预设的行进路线到达一个分拣口的位置,测距传感器采集夹爪或者吸盘到目标位置之间的距离,将实时信号传递给中央处理器,中央处理器计算出夹爪或者吸盘和目标位置之间的距离偏差,发送给中央控制器,中央控制器根据距离偏差规划夹爪或者吸盘从当前位置到目标位置的最佳路径,计算第一连接臂、第二连接臂、第三连接臂的角度和位置,根据计算结果,中央控制器向伺服电机发送指令,伺服电机驱动第一连接臂、第二连接臂、第三连接臂进按照预定路径到达目标位置即靠近快递包裹时,第二摄像头对快递包裹进行图像采集,将采集到的图像数据信号发送给信号转换器,信号转换器将接收到的图像数据信号的电信号转换为数字信号并发送给数据处理器,数据处理器计算图像数据的像素尺寸,根据预设像素尺寸和实际尺寸的比例系数计算快递包裹的实际尺寸,将实际尺寸和预设尺寸进行对比,如果实际尺寸小于预设尺寸,则使用夹爪夹取该快递包裹,伺服电机驱动第一连接臂、第二连接臂、第三连接臂转动到达快递包裹的正上方,所述连接轴为双出杆式气缸,控制器控制连接轴对应的端头杆伸长,控制器控制气缸启动,气缸带动推臂向下伸展,使两个夹爪夹住该快递包裹,第一连接臂、第二连接臂、第三连接臂再按照预定路径将该小尺寸的快递包裹移动到对应的1号小推车上方,然后气缸带动推臂向上收缩,使两个夹爪分离将该快递包裹投入1号小推车内,中央控制器确认任务已完成,并向伺服电机发送指令,伺服电机驱动第一连接臂、第二连接臂、第三连接臂进行反向运动,回到初始位置,进行下一个快递包裹的分拣;如果实际尺寸大于预设尺寸,控制器控制旋转电机启动,旋转电机旋转180度,旋转电机带动连接轴转动,连接轴带动吸盘和夹爪转动,通过吸盘对快递包裹进行吸附分拣,伺服电机驱动第一连接臂、第二连接臂、第三连接臂转动到达快递包裹的正上方,所述连接轴为双出杆式气缸,控制器控制连接轴对应的端头杆伸长,控制器控制真空抽泵抽气,使吸盘吸住该快递包裹,第一连接臂、第二连接臂、第三连接臂再按照预定路径该大尺寸的快递包裹移动到对应的2号小推车上方,然后控制器控制真空抽泵停止工作,快递包裹失去吸附力从吸盘上掉落入2号小推车内,如此周而复始,实现不同分拣口的快递包裹按尺寸大小的分拣。能够便于后续装车工作的进行,使得不同尺寸的快递包裹进行分开转运,或者是先将大快递包裹放在下面,小快递包裹堆叠在大快递包裹上,能够充分利用车内空间,防止大尺寸的快递包裹对小尺寸快递包裹的挤压,减少快递包裹的损坏;
77、进一步的,所述轮胎的侧面置有橡胶凸起;
78、优选的,所述橡胶凸起有多个,多个所述橡胶凸起沿所述轮胎的侧面无间距地排列;
79、进一步的,所述吸盘替换为小型吸盘,所述小型吸盘置于所述连接板的顶面,连接六通的一端和所述真空抽泵的出气口相连接,且相连通,连接六通的另一端置于所述连接板的底面,连接管的一端和所述连接六通相连接,且和所述连接六通相连通,连接管的另一端穿过所述连接板上开有的通孔和所述小型吸盘相连接,且和所述小型吸盘相连通,
80、优选的,所述连接六通可以替换为连接四通、连接五通,所述小型吸盘有多个,多个所述小型吸盘均匀分布在所述连接板的顶面,多个所述小型吸盘和多个所述连接管一一对应。
81、有益效果
82、一、改变挡板之间的距离形成不同尺寸的卸货结构,能够将不同尺寸的快递包裹分拣至不同的卸货结构内,实现不同尺寸快递包裹的分类存放。
83、二、通过多个挡板沿着滑轨移动调整多个挡板之间的距离,能够使每个卸货结构存放不同数量的快递包裹,并对快递包裹进行支撑和防护,减少快递包裹的滑落。
84、三、通过改变第三伸缩杆伸展的不同,使承接板倾斜向下,快递包裹在重力作用和滚珠的滚动作用下掉落入装车车辆,能够提高快递包裹的转运效率。
本文地址:https://www.jishuxx.com/zhuanli/20240830/285632.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表