一种饲喂系统用防阻塞下料的工作方法
- 国知局
- 2024-09-05 14:40:12
本发明涉及饲喂系统,具体涉及一种饲喂系统用防阻塞下料的工作方法。
背景技术:
1、工厂化水产养殖模式能减低养殖面积,抵御恶劣的养殖环境,近年来在我国迅速兴起。工厂化水产养殖过程主要采用自动投饵系统进行投饵,在自动投饵系统中,采用管道气力输送颗粒饲料。颗粒饲料在输送过程中,由于部分颗粒饲料具有质量轻、密度小、体积大等特点,常常会由于输送装备工艺参数选取不合理导致饲料颗粒堆积阻塞管道或下料器等问题。自动投饵装置中缺乏准确的定量投放系统,现有气力投饲机中常见的重力传感器与控制器无法实现实时的数据交互导致投量数据不准确。而面对小型育苗池等需要精确投饲,投饲量过大时易导致水体氨氮和ph值过高,投饲量过小时导致鱼类营养不足降低了效益。因此,需提出一种精准控量的防阻塞投饲装置。
2、如专利申请号为cn 202323069569 .7,公告日为2024.05.31的专利文献中公开了一种投食装置,具体涉及一种用于水产养殖的投食装置。该用于水产养殖的投食装置由底座、进料桶和输送风机构成,底座上设置有进料桶,进料桶一侧的底座上设置有输送风机,进料桶的另一侧通过支撑架安装有分散器;进料桶下方设置有文丘里管,文丘里管分别与进料桶、输送风机和分散器连通。该用于水产养殖的投食装置将分散器通过支撑架固定在养殖水域中,通过输送风机能向分散器输送饲料,进而能将饲料输送至养殖水域内,从而在养殖水域中进行分散投食,使饲料不易偏移至岸上,确保成功投食。
3、以上文献的投食装置,在进料桶下方设置有文丘里管,文丘里管分别与进料桶、输送风机和分散器连通,由于文丘里管的进口与进料端的输出口垂直设置,从而其文丘里管主要是为了实现通过文丘里管能产生负压将饲料吸入到文丘里管内,但是这样容易出现当进料桶内的进料过多而文丘里管产生的负压不够或输送风机吹送的风力不够时,导致进料桶内的饲料无法可靠地进入到文丘里管内进行投料,从而导致进料阻塞的情况发生,且该装置在投料之前需要将进料桶与文丘里管之间的阀门关闭进行储料,这样无法确保投料的定量化。
技术实现思路
1、本发明提供一种饲喂系统用防阻塞下料的工作方法,利用本发明的方法,能防止输送饲料时在下料管出现堵塞的现象。
2、为达到上述目的,一种饲喂系统用防阻塞下料的工作方法,控制vc<v悬,其中,vc为下料管内气体流通速度,vc向上的方向为正值,v悬为颗粒料的悬浮速度,具体包括如下步骤:
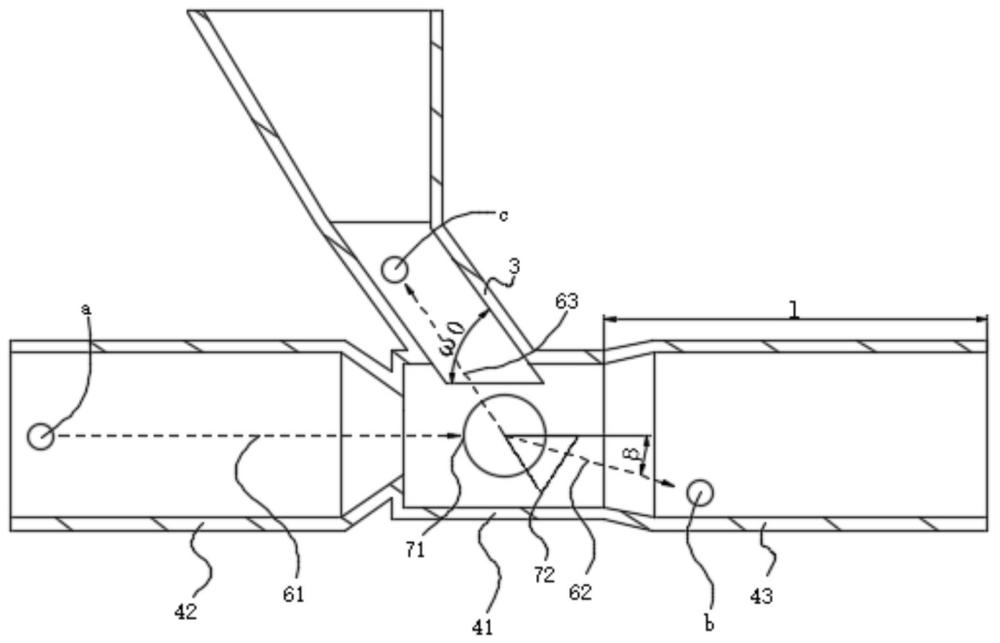
3、s1下料管的下端与文丘里管的中部连通,其中,文丘里管位于下料管的一端为气体入口段,文丘里管位于下料管的另一端为气体出口段;控制下料管与文丘里管之间的夹角0<ω0<ω使得vc<v悬,ω为vc=v悬时下料管与文丘里管之间的夹角;
4、s2 控制气体出口段的长度l<llin,采用下列公式(1)计算当vc=v悬时的l的临界值为:
5、;
6、式中sa为气体入口段的内横截面积,sc为下料管的横截面积,v起为气体出口段起始端气体输送速度,m起为气体出口段起始端气体输送单位截面的质量,m末为气体出口段起始端气体输送单位截面的质量,k为气体出口段管道阻力系数,d为气体出口段管道的内径,ρ为气体出口段气体密度,va为气体入口段气体输送速度,气体出口段气体输送单位截面的质量为mb,vb为气体出口段气体输送速度。
7、对于本发明的饲喂系统来说,气体从文丘里管的气体入口段进入,饲料从下料管落下,在气流的作用将下料管中的饲料送入到文丘里管的气体出口段并将饲料输送出去,因此,针对气流输送饲料来说,要保证进入到下料管中的气体流通速度vc小于进入到下料管的颗粒料的悬浮速度v悬才能避免颗粒料阻塞在下料管内,从而实现顺利的饲喂,因此,在本发明通过控制下料管与文丘里管的轴线角度以及文丘里管的气体出口段的长度来解决本发明的技术问题。
8、进一步的,计算ω的步骤为:
9、s11 设定气体入口段气体输送单位截面的质量为ma,气体入口段气体输送速度为va,气体出口段气体输送单位截面的质量为mb,气体出口段气体输送速度为vb,下料管内气体输送单位截面的质量为mc;
10、s12 设定气体出口段气体流动方形与文丘里管的轴线之间的夹角为β;
11、s13 计算ω,根据动量守恒定律则有:
12、;
13、对竖直和水平两个方向进行计算有:
14、;
15、将vc=v悬代入上述公式(3)计算出ω。
16、通过上述方案,当控制0<ω0<ω时,则在下料管内的气体流通速度会小于颗粒料的悬浮速度,有效避免颗粒料在下料管中阻塞。
17、进一步的,通过连续性定理确定vc与l的关系。
18、以上设置,通过连续性定理能确保确定的长度能保持物料的连续性。
19、进一步的,下料管的上端连接有下料装置,在下料装置上连接有料斗,饲料从料斗经下料装置和下料管进入到文丘里管内实现饲喂。
20、以上设置,这样便于饲料的颗粒料顺利进入到下料管内。
21、进一步的,还包括控制装置,所述控制装置包括步进电机和挡板,步进电机的输出端与挡板固定连接,步进电机控制挡板移动连通料斗和下料装置,料斗和下料装置之间设置挡板。
22、以上设置,通过设置挡板和步进电机,则能更好的控制料斗内的饲料是否进入到下料装置。
23、进一步的,下料装置包括下料装置本体和设置在下料装置本体上端的承载台,承载台用于安装挡板。
24、以上设置,该结构,便于安装挡板。
25、进一步的,下料装置本体包括圆筒体和设置在圆筒体下端的从上至下逐渐变小的下料部分,圆筒体内具有空间。
26、以上设置,方便在饲料的重力作用下进入到文丘里管内。
技术特征:1.一种饲喂系统用防阻塞下料的工作方法,其特征在于:控制vc<v悬,其中,vc为下料管内气体流通速度,vc向上的方向为正值,v悬为颗粒料的悬浮速度,具体包括如下步骤:
2.根据权利要求1所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:计算ω的步骤为:
3.根据权利要求1所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:通过连续性定理确定vc与l的关系。
4.根据权利要求1所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:下料管的上端连接有下料装置,在下料装置上连接有料斗,饲料从料斗经下料装置和下料管进入到文丘里管内实现饲喂。
5.根据权利要求1所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:还包括控制装置,所述控制装置包括步进电机和挡板,步进电机的输出端与挡板固定连接,步进电机控制挡板移动连通料斗和下料装置,料斗和下料装置之间设置挡板。
6.根据权利要求4所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:下料装置包括下料装置本体和设置在下料装置本体上端的承载台,承载台用于安装挡板。
7.根据权利要求1所述的一种饲喂系统用防阻塞下料的工作方法,其特征在于:下料装置本体包括圆筒体和设置在圆筒体下端的从上至下逐渐变小的下料部分,圆筒体内具有空间。
技术总结一种饲喂系统用防阻塞下料的工作方法,控制v<subgt;c</subgt;<v<subgt;悬</subgt;,具体包括如下步骤:S1下料管的下端与文丘里管的中部连通,其中,文丘里管位于下料管的一端为气体入口段,文丘里管位于下料管的另一端为气体出口段;控制下料管与文丘里管之间的夹角0<ω<subgt;0</subgt;<ω使得v<subgt;c</subgt;<v<subgt;悬</subgt;,ω为v<subgt;c</subgt;=v<subgt;悬</subgt;时下料管与文丘里管之间的夹角;S2控制气体出口段的长度l<l<subgt;lin</subgt;,计算当v<subgt;c</subgt;=v<subgt;悬</subgt;时的l的临界值为。利用本发明的方法,能防止输送饲料时在下料管出现堵塞的现象。技术研发人员:罗毅智,周星星,刘佳豪,魏鑫钰,袁余,吴佳受保护的技术使用者:广东省农业科学院设施农业研究所技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/287572.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种可伸缩式摘果装置
下一篇
返回列表