基于多特征参量的组合电器开关设备状态感知与故障诊断方法
- 国知局
- 2024-09-05 14:40:29
本发明涉及组合电器开关设备的故障诊断,具体地说是一种基于多特征参量的组合电器开关设备状态感知与故障诊断方法。
背景技术:
1、自gis设备进入电力市场,学者们进行了大量的gis放电性故障诊断研究,近些年才开始对gis设备机械故障进行研究。主要的研究方法是在实验室的gis设备上模拟gis常见的机械缺陷,并通过采集gis的振动或者声音信号对其进行分析,进而判断gis的机械故障类型。常见的检测方法包括振动信号检测法和声音信号检测法。(1)振动信号检测法;振动信号是设备机械状态的重要表征。gis在正常运行时,由于电动力的作用,其外壳会产生基频为100hz的振动信号,当gis设备存在安装不当、元器件磨损等机械缺陷时,gis会产生长期的异常机械振动,可以通过对外壳振动信号的采集和分析检测到异常振动的存在。(2)声音信号检测法:gis内部存在机械故障时,不仅会产生异常振动,还会引起设备异响。经验丰富的现场工作人员往往可以通过听设备的声音判断设备的机械故障,声音信号检测法就是用声音传感器替代人耳采集设备声音,通过信号特征提取及故障诊断模型进行设备机械状态的识别。与振动信号检测方法相比,声音信号检测不易受传感器安装位置的影响,且为非接触式安装,实际应用中更加方便。尽管振动信号和声音信号在gis设备机械故障诊断领域有较多的应用,但振动信号检测法存在安装不方便,检测结果受传感器安装位置影响较大等缺点,而声音信号检测法存在易受环境噪声干扰的缺点。因此,通过把振动和声音信号结合进行故障诊断能够取得更好的诊断效果。
2、目前针对gis绝缘故障的诊断方法很多,且较为成熟。机械故障作为gis设备的主要故障,目前相关的研究却不够充分。机械故障在初期往往是不容易被发现的,但随着故障的演化,可能会导致设备发生绝缘放电,从而引发更大的设备故障。所以,gis机械缺陷是不容忽视的,虽然机械缺陷前期不会引起任何故障,但长期发展下去就会演变为严重的电气故障,危害电网的安全稳定运行。因此,对gis设备的各种机械故障进行系统性的研究并根据机械故障特点提出合适的故障诊断方法是至关重要的。
3、在故障诊断领域,利用多传感信息融合技术比单一信号的故障诊断结果更加精确,近年来,在电气设备的状态监测中得到了广泛应用。例如,目前对gis断路器机械故障进行诊断存在的缺陷是:
4、(1)目前的断路器机械故障诊断方法都是针对常规断路器的,很少有对gis内部断路器的机械故障诊断的研究。
5、(2)对断路器操动机构早期机械缺陷的定位与识别问题尚缺乏深入研究,针对断路器振动信号的分析大多数方法都是传统的线性时间序列分析方法,而非线性时间序列分析方法(例如混沌理论的相空间重构技术)对断路器振动信号更加适用。目前对断路器振动信号进行相空间重构提取故障特征的方法,在对断路器缺陷进行定位方面尚不够精确。
6、(3)目前对断路器的监测大多是单一信号的监测与分析,对断路器机械故障的监测不够全面,且容易受到现场环境的干扰导致诊断结果不准,可靠性不高。
技术实现思路
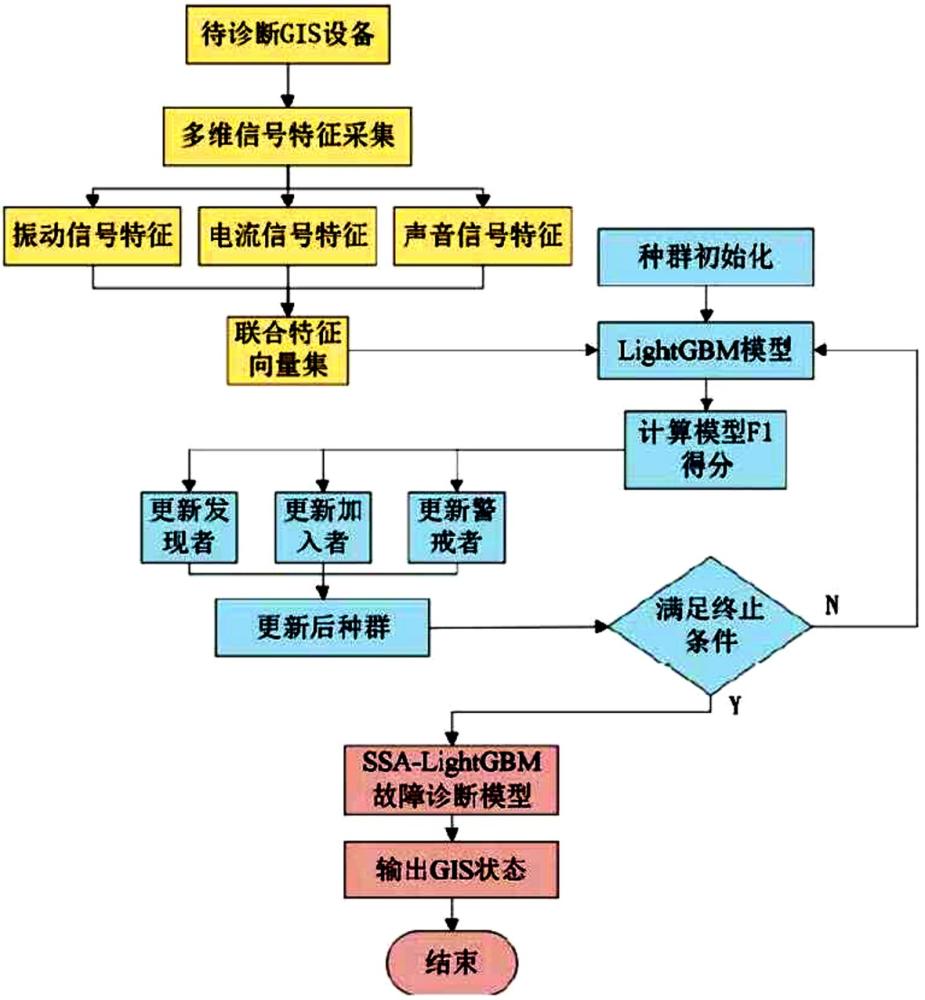
1、本发明的目的在于提供一种基于多特征参量的组合电器开关设备状态感知与故障诊断方法,首先通过对比振动信号特征值异常率和基准值对机械缺陷所在振动子阶段进行定位和初步识别,然后根据gis设备的振动、电流和声音信号的联合特征值对gis机械故障进行精确诊断。
2、本发明解决其技术问题所采取的技术方案是:基于多特征参量的组合电器开关设备状态感知与故障诊断方法,包括以下步骤:
3、s1、多维信号特征采集
4、s1.1、采集gis设备分合闸状态的振动信号、电流信号和声音信号;
5、s1.2、gis设备振动子阶段划分
6、根据gis设备操动机构零部件动作时序,对振动信号分时分割处理,得到四个振动子阶段,分别为:阶段1-掣子脱扣阶段、阶段2-弹簧释放阶段、阶段3-机构传动阶段和阶段4-机构制动阶段;
7、s1.3、构建故障数据集
8、提取振动信号、电流信号和声音信号的特征参量并联合得到多维信号特征向量e;
9、s2、gis设备缺陷定位
10、s2.1、提取步骤s1.2中各子阶段的振动信号;
11、s2.2、对振动子阶段的振动信号按照相空间重构的方法计算其混沌特征lle及相轨迹特征acd、vdo;
12、s2.3、计算特征值异常率k,即未知信号振动子阶段的特征值与正常信号相应振动子阶段的特征值的偏差的百分比;
13、 (1)
14、其中,表示待测信号特征值,表示正常信号的特征值。
15、比较特征值异常率k和异常率界限值的大小,当某一振动子阶段的特征值异常率k大于异常率界限值时,表明故障位于该振动子阶段内;
16、s3、基于lightgbm模型计算f1得分指标优化lightgbm模型
17、s3.1、构建lightgbm模型
18、通过单边梯度采样算法、互斥特征捆绑算法、直方图算法和具有深度限制的按叶增长策略对梯度提升树算法优化得到lightgbm模型;
19、s3.2、选择f1得分指标作为lightgbm模型参数优化的指标
20、s3.3、优化lightgbm模型参数
21、使用麻雀搜索算法对lightgbm的超参数:学习率learning_rate、树的深度max_depth、叶子节点的个数num_leaves和subsample进行优化,subsample用于训练弱学习器,得到各参数的最优值;
22、s4、基于ssa-lightgbm故障诊断模型对gis机械故障进行诊断
23、将振动信号、电流信号和声音信号输入ssa-lightgbm故障诊断模型,获得gis断路器状态。
24、进一步地,步骤s1.3的具体步骤为:
25、s1.3.1、将提取的gis设备分合闸线圈电流信号的7个时域特征作为特征向量e1;
26、s1.3.2、将gis设备振动信号四个子阶段的混沌特征和相轨迹特征共12维特征作为特征向量e2;
27、s1.3.3、将pca降维处理后的声音信号的9维f-gfcc系数作为特征向量e3;
28、s1.3.4、最后,将电流信号、振动信号和声音信号的特征向量联合得到多维信号特征向量e。
29、进一步地,梯度提升树算法的步骤包括:
30、输入一个给定的训练集,最大迭代次数为m,损失函数为;
31、(1)初始化模型,c为常量
32、(1)
33、(2)对于迭代次数时:
34、a、计算当前迭代次数的负梯度:
35、(2)
36、b、根据训练集构建一棵cart决策树,对于第t棵决策树的每一个叶节点,损失函数的最小输出值根据以下公式计算:
37、(3)
38、其中,表示第m棵cart决策树的叶结点区域,j为叶结点的个数;
39、c、更新模型的计算公式如下:
40、(4)
41、i为指示函数,当数据属于rmj时i=1,否则i=0;
42、(3)计算得到最终的强化学习器
43、 。 (5)
44、进一步地,根据样本的真实类别和故障诊断模型的预测结果类别划分为真正例(tp)、假正例(fp)、真反例(tn)和假反例(fn)四种情况,f1得分指标f_score为精准率和召回率的调和平均值,计算公式如下:
45、(6)
46、其中,p为精准率,r为召回率;
47、精准率是某一种类别的预测结果中,分类正确的数量与该类别所有分类结果的比值,计算公式如下:
48、(7)
49、召回率是某一实际类别中,分类正确的样本数与该类别所有分类结果的比值,计算公式如下:
50、。(8)
51、进一步地,麻雀搜索算法对参数的优化方式为:
52、发现者的位置更新如下:
53、(9)
54、式中,t表示当前的迭代次数;t为最大迭代次数;α是(0,1)之间的均匀随机数;q是服从标准正态分布的随机数;l是1×d且元素全部为1的矩阵;r2∈[0,1]表示警告值;st∈[0.5,1]表示安全值;
55、加入者位置更新如下:
56、(10)
57、式中,表示第t次迭代时的全局最差位置;表示第t+1次迭代时发现者的最佳位置;n表示种群规模;a表示一个1×d且每个元素随机赋值为1或者-1的矩阵,且满足;
58、侦察者位置更新如下:
59、(11)
60、式中,表示第t次迭代时的全局最佳位置;β表示步长控制参数,它是一个正态分布的随机数,均值为0,方差为1;k为[-1,1]之间的随机数;fi代表当前麻雀的适应度;fg代表当前麻雀种群的最佳适应度;fw代表当前麻雀种群最差的适应度。
61、本发明的有益效果是:通过计算振动信号子阶段特征值异常率的方法,确定机械缺陷所在振动子阶段,从而缩小故障搜索范围,定位机械故障,实现对机械故障的初步判断。通过ssa-lightgbm聚类学习算法,融合电流信号、振动信号和声音信号的多维特征信号的特征向量导入ssa-lightgbm故障诊断模型,相较于传统的机器学习算法,精确率高、分类效果好,实现对gis不同分合闸机械状态的有效识别。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287593.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表