一种基于3D点云重建的钵盘苗漏苗检测方法
- 国知局
- 2024-09-11 14:25:47
本发明涉及智能移栽检测领域,具体涉及一种基于3d点云重建的钵盘苗漏苗检测方法。
背景技术:
1、随着现代农业技术的快速发展,人们采取的育苗方式逐步向工厂化的钵盘苗方向,自动化移栽技术逐渐成为研究的热点。钵盘苗作为常用育苗方式,其移栽过程中的准确、高效检测是实现自动化移栽的关键。采取钵盘苗育苗方式可对种苗进行统一化培育,但种苗叶片之间会产生交错,致使移栽设备无法准确判断漏苗所在穴孔,无法向漏苗穴孔进行补栽,不利于后续进行移栽作业。
技术实现思路
1、针对现有技术的缺陷,本发明提供一种基于3d点云重建的钵盘苗漏苗检测方法,解决目前进行机械化移栽时未及时发现漏苗,导致降低移栽作业质量的问题。
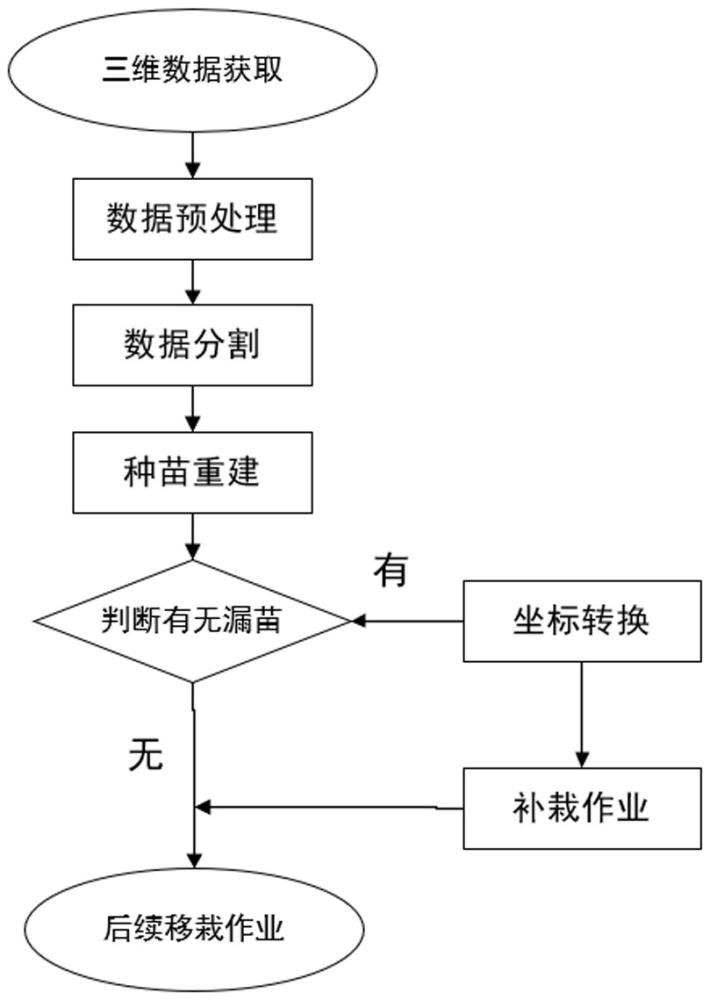
2、为了达到上述目的,本发明所采用的技术方案是:一种基于3d点云重建的钵盘苗漏苗检测方法,包括以下步骤:
3、s1:移栽机器人将穴盘苗输送至检测黑箱,并位于深度相机正下方,使深度相机在视野内光线明亮均匀;
4、s2:使用深度相机对穴盘苗进行扫描,获取图像数据,使用深度相机拍摄穴盘苗获取其深度图像,图像中每个像素点的值表示该点到相机的深度信息;
5、s3:对采集到的点云数据进行预处理;
6、s4:使用点云处理库pointcloudlibrary对穴盘和种苗进行分割,将点云数据分割成单个的种苗区域,识别每个穴孔的种苗,并将每个种苗的点云数据提取出来;
7、s5:对每个穴孔内部的点云数据进行处理,提取种苗的形状和结构信息,使用表面重建技术,将种苗从根部到叶片的形态进行重建;
8、s6:对重建出的种苗进行分析和比对,利用种苗的形态等特征进行识别和判断,并得出漏苗所在的穴孔坐标;
9、s7:如有识别出的漏苗,将其所在的穴孔标注出来,机械手进行后续剔除和补栽作业。
10、作为优选的方案,步骤s2中,对穴盘种苗进行扫描,获取图像数据的过程为:将深度相机正对穴盘苗,使深度相机视野内光线明亮均匀,对穴盘苗进行扫描,获取点云数据。
11、作为优选的方案,步骤s3中,预处理包括:采取高斯滤波进行去噪处理,卷积核大小设置为3x3,标准差设置为1;采取体素网格滤波(voxel grid filter)函数,将体素网格大小设置为1cm;将每个像素点的深度值转换为对应的三维坐标,并将这些坐标组合成点云数据集。
12、作为优选的方案,步骤s4中,将点云数据分割成单个的种苗区域,使用基于k-means聚类方法,用于将点云数据分割成不同的聚类,对应不同的种苗区域:
13、设种苗点云为一个包含n个数据点的数据集,记为{a1,a2,...,an},其中每个数据点ai表示一个点云中的点;设定k个聚类中心,记为{c1,c2,...,ck},其中每个聚类中心cj表示一个种苗的中心点;使用欧氏距离dist(ai,cj)来度量数据点ai与聚类中心cj之间的距离,公式如下:
14、
15、其中,ai和cj分别表示数据点和聚类中心的坐标。
16、作为优选的方案,步骤s5中,对每个种苗进行形态重建采用poisson重建算法:设点云数据集x包含d个点,每个点的坐标表示为(xi,yi,zi),其中i表示点的索引;对于每个点xi,使用基于最近邻的法向量估计方法得出其法向量ni,表示点云表面在该点处的法向量方向;poisson重建算法通过求解以下泊松方程来估计表面坐标数据f(x,y,z),即物体表面的函数表示:
17、
18、其中,表示拉普拉斯算子,表示散度运算符,n为法向量,泊松方程的解f即为重建的物体表面网格模型数据。
19、作为优选的方案,使用open3d库读取物体表面网格模型数据,进行种苗三维点云可视化操作。
20、作为优选的方案,对重建出的种苗与完整健康苗点云数据集进行分析和比对,判断是否有漏苗,以及使用透视投影法将漏苗所在穴孔三维数据转换为二维坐标,公式如下:
21、
22、其中,u和v为穴孔在三维空间中水平平面上的位置,h为三维空间中深度,f为相机焦距,u为二维水平坐标,v为二维垂直坐标。
23、有益效果:本发明可根据种苗生成的3d点云数据进行种苗三维重建,依次经图像数据预处理、k-means聚类数据分割,能够更好的将种苗与穴盘区分开;在种苗重建中,使用poisson重建算法可更好重建种苗模型,更直观便捷判断出有误漏苗情况,及漏苗所在穴孔坐标;本发明提高了移栽作业中对漏苗检测补栽的判断效率,可提升移栽作业质量。
技术特征:1.一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,步骤s2中,对穴盘种苗进行扫描,获取图像数据的过程为:将深度相机正对穴盘苗,使深度相机视野内光线明亮均匀,对穴盘苗进行扫描,获取点云数据。
3.如权利要求1所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,步骤s3中,预处理包括:采取高斯滤波进行去噪处理,卷积核大小设置为3x3,标准差设置为1;采取体素网格滤波(voxel grid filter)函数,将体素网格大小设置为1cm;将每个像素点的深度值转换为对应的三维坐标,并将这些坐标组合成点云数据集。
4.如权利要求1所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,步骤s4中,将点云数据分割成单个的种苗区域,使用基于k-means聚类方法,用于将点云数据分割成不同的聚类,对应不同的种苗区域:
5.如权利要求1所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,步骤s5中,对每个种苗进行形态重建采用poisson重建算法:设点云数据集x包含d个点,每个点的坐标表示为(xi,yi,zi),其中i表示点的索引;对于每个点xi,使用基于最近邻的法向量估计方法得出其法向量ni,表示点云表面在该点处的法向量方向;poisson重建算法通过求解以下泊松方程来估计表面坐标数据f(x,y,z),即物体表面的函数表示:
6.如权利要求5所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,使用open3d库读取物体表面网格模型数据,进行种苗三维点云可视化操作。
7.如权利要求1所述的一种基于3d点云重建的钵盘苗漏苗检测方法,其特征在于,步骤s6中,对重建出的种苗与完整健康苗点云数据集进行分析和比对,判断是否有漏苗,以及使用透视投影法将漏苗所在穴孔三维数据转换为二维坐标,公式如下:
技术总结本发明涉及一种基于3D点云重建的钵盘苗漏苗检测方法,通过深度相机采集钵苗盘点云数据信息,并对数据进行处理,将种苗与穴盘进行分割,从而判断种苗位于哪个穴孔并判断无苗穴孔所在位置,通过透视投影将无苗穴孔坐标计算出来,进行后续补栽作业。提高了移栽作业中对漏苗检测补栽的判断效率,可提升移栽作业质量。技术研发人员:金鑫,张龙,李明勇,侯一博,肖利强,解晓琳,马淏,冉晨辉受保护的技术使用者:河南科技大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表