一种汽车发动机悬置系统控制方法
- 国知局
- 2024-09-11 14:53:27
本发明涉及汽车发动机,具体为一种汽车发动机悬置系统控制方法。
背景技术:
1、在汽车工业中,提高乘客舒适度成为了重要的研究方向之一,其中一个关键问题是减小不必要的振动。发动机产生的振动是导致车辆震动的主要原因之一。为了降低这种振动对乘客的影响,广泛采用发动机悬置系统来支撑发动机并有效地隔离底盘与振动之间的联系。在商用车辆的动力总成安装系统中,常见的是采用被动橡胶发动机悬置。橡胶发动机悬置以其低刚度和轻阻尼特性,在阻隔高频振动方面表现出色,为乘坐舒适性提供了保障。然而,这种设计可能导致发动机在低共振频率下运动较大,因此需要在橡胶悬置的设计中平衡隔振和发动机悬置之间的冲突。
2、为了克服被动悬置的性能限制,引入了主动悬置技术。主动悬置系统通常配备传感器和执行器,并通过外部能源供应进行操作。然而,由于物理系统受到多种不确定性来源和外部输入的影响,实际输出与数学模型之间存在差异。因此,在这种不确定性的情况下,使用鲁棒控制方案是控制发动机悬置系统的有效方法。
3、车辆车身振动的主要源头是发动机内力,通常被视为干扰输入。因此,主要的控制目标是抑制这些干扰,以减弱车身的不良振动。过去的研究主要集中在测量主动悬置位置传感器处的传递力,并采用控制方法抑制这些干扰。然而,主动悬置并不是传递扰动的唯一途径,汽车发动机通常由额外的被动悬置支撑。部分扰动通过这些不能直接测量但可以估计的被动悬置传递。估计不需要的扰动对于了解振动发动机的未知输入至关重要。在发动机悬置系统中,利用主动悬置的反馈传感器的输出来开发一个观测器,可以估计所有系统状态和未知扰动。通过主动消除不需要的扰动,以达到更高的隔振性能。因此,基于观测器的控制器具有成为高性能控制方法的潜力。然而,将观测器与主控制器结合使用以实现更高性能可能比单独使用观测器来估计和抑制不需要的扰动更为有效。
4、申请号为cn202310174064.2的中国发明专利提出一种基于被动侧动刚度寻优的悬置系统隔振率优化方法,包括以下步骤;步骤s1、建立汽车动力总成悬置系统有限元模型;步骤s2、利用有限元分析软件对汽车动力总成悬置系统的隔振率进行计算;步骤s3、采用nsga-i i多目标寻优算法,以满足悬置系统稳健性设计为约束目标,以隔振率最高,动刚度目标值设定合理为寻优目标,对悬置系统被动侧支架动刚度目标值进行寻优,并根据寻优结果选择一组最贴近的寻优方案;步骤s4、根据寻优结果中最贴近的寻优方案,对被动侧支架结构进行优化和仿真验证;步骤s5、校核悬置系统隔振率,完成悬置系统隔振率优化设计。该发明针对悬置系统被动侧支架,采用多目标算法进行寻优,根据寻优结果提出对应的优化方案。
5、申请号为cn202311380986.5的中国发明专利提出一种减震型汽车发动机悬置,包括安装在两侧汽车纵梁的纵梁固定框,纵梁固定框上转动设置有护板,护板的上部设置有撑栓,纵梁固定框上设有诱导槽且撑栓滑动插入诱导槽,护板上设置有悬置支架,纵梁固定框上设置有限挡机构,限挡机构用于正常阻止悬置支架旋转以及发动机受到撞击后释放悬置支架。由气囊保护机构和点火控制模组配合作用下,及时有效针对地面高凸情况,合理地接通气体发生器发生电源,气体发生器瞬时向板膨胀囊充气;气体会瞬时进入板膨胀囊中,使得板膨胀囊涨出发动机座块,实现为发动机的下沉的底部进行抗冲击保护,形成对发动机下沉最低处以及倾斜区域有效的防护。
6、申请号为cn201510560163.x的中国发明专利提出高速轨道车辆二系横向悬置最优阻尼比的优化设计方法,属于高速轨道车辆悬置技术领域。本发明通过建立1/2车体行驶横摆振动微分方程,利用matlab/simulink仿真软件,构建了二系横向悬置系统的横摆振动优化设计仿真模型,并以轨道方向不平顺随机输入为输入激励,以车体和车轮横摆运动的振动加速度均方根值最小为设计目标,优化设计得到基于舒适性和基于安全性的二系横向悬置系统的最佳阻尼比,进而计算得到其最优阻尼比。通过设计实例及simpack仿真验证可知,该方法可得到准确可靠的二系横向悬置系统的最优阻尼比值,为高速轨道车辆二系横向悬置阻尼比的设计提供了可靠的设计方法。利用该方法,可提高轨道车辆悬置系统的设计水平及车辆乘坐舒适性和安全性。
7、但是,现有技术存在以下缺陷:
8、1.在主动悬置方面,大部分研究都集中在主动悬置系统上,却忽略了汽车发动机通常由额外的被动悬置支撑这一事实。这导致未能全面考虑扰动力传递的途径。
9、2.缺乏直接测量被动悬置的扰动力:被动悬置传递的扰动力不能直接测量,只能进行估计。导致估计的不确定性和可能的误差,限制对系统行为的准确理解。
10、3.控制方案的局限性:以往的研究主要侧重于使用反馈控制器来抑制不需要的力,但这种方法可能在不同振动频率范围内并不有效。这表明需要更多的方法来提高振动控制的性能。
11、4、技术研究尚不完善:尽管已经有了一些工作,但对于如何同时利用观测器和主控制器来提高性能的研究仍然相对不足。这表明技术研究仍有待完善,需要进一步的探索和改进。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种汽车发动机悬置系统控制方法,以提高汽车驾驶员的舒适度。
3、(二)技术方案
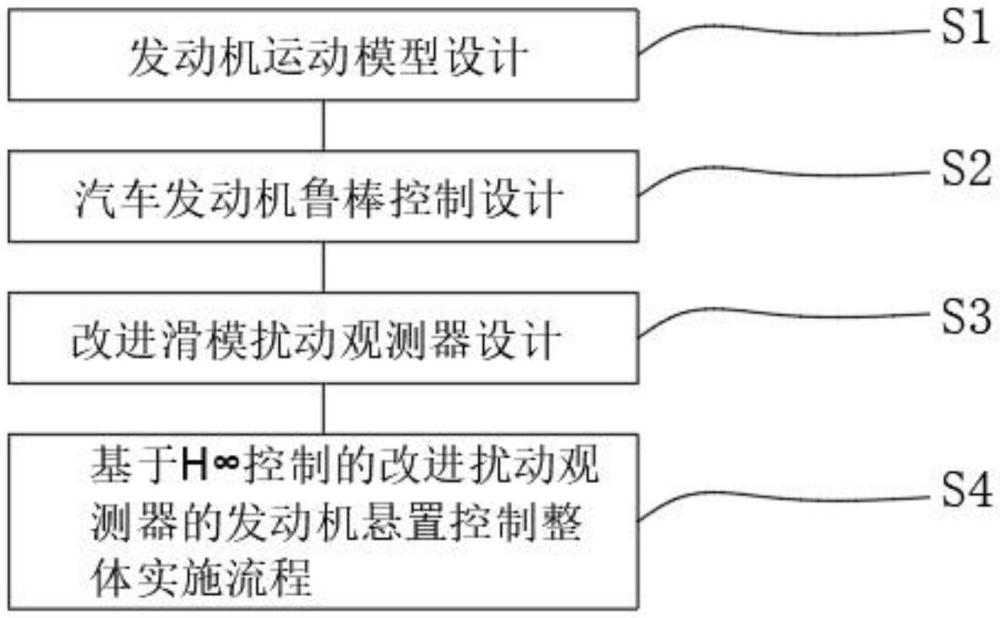
4、为实现以上目的,本发明通过以下技术方案予以实现:一种汽车发动机悬置系统控制方法,包括以下步骤:
5、步骤一:建立发动机模型:
6、分析建立汽车发动机模型,包括发动机在悬置上的动态特性以及内部机制、内部扰动分析;
7、步骤二:基于h∞鲁棒控制器设计:
8、基于发动机模型和不确定性,采用h∞控制器让控制系统中的受控对象和误差构成回路,使整个闭环系统能在包含模型误差参数变化和外界干扰的不确定性因素情况下仍具备良好的控制稳定性;
9、步骤三:设计改进的滑模扰动观测器:
10、使用传感器测量来设计扰动观测器,设计改进观测器,以估计未测量的传递扰动,确保观测器能够准确地估计传递扰动,并将估计扰动用作控制信号的一部分;
11、步骤四:控制器扰动观测器集成:
12、将h∞鲁棒控制器和改进的滑模扰动观测器集成到系统中,以形成一个完整的控制系统,确保控制器和观测器之间的协调和有效沟通,以实现对传递扰动的实时估计和控制。
13、优选的,步骤一中,发动机运动模型设计,具体包括以下步骤:
14、s101、坐标系建立:在汽车发动机悬置系统的六自由度动力学模型中,采用了整车坐标系,坐标系的原点设定为动力总成的质心,x轴指向汽车的行驶方向,y轴垂直于x轴并在汽车行驶方向右侧,z轴方向垂直向上,质心在x、y、z轴三个方向上的位移分别用x、y、z表示,而绕xyz轴的转角则用θx、θy、θz表示,质点有六个自由度,用广义坐标向量表示:
15、{q}t=(x,y,z,θx,θy,θz)t;
16、s102、汽车动力学分析:使用拉格朗日方程来推导汽车发动机悬置系统的自由振动和受迫振动的动力学微分方程,即自由振动的微分方程为:
17、式中,x代表悬置系统的广义坐标,r代表悬置系统所受外载荷,m代表悬置系统的质量矩阵,k代表悬置系统的总刚度矩阵;
18、s103、内部扰动处理:发动机模型由两个独立的子模型组成;第一个子模型是发动机悬置系统的六自由度刚体模型,第二个子模型是发动机内部部件(包括活塞、连杆和曲轴)的动力学模型。
19、优选的,步骤二中,汽车发动机鲁棒控制设计,具体包括以下步骤:
20、s201、鲁棒不确定性控制器设计:刚度和阻尼矩阵的表示形式如下:
21、
22、参数不确定性的上线性分式变换形式由对角不确定性矩阵表示,其公式如下:
23、δ=diag(δci6,δci2,δki6,δki2);
24、s202、权重函数设计:控制权重函数wu的设定如下,以反映控制要求的频率特性:
25、
26、利用噪声重构权重函数wn对传感器的噪声信号进行建模:
27、
28、s203、h∞鲁棒控制器设计:系统外部输入信号与系统性能评价信号z的关系表达:
29、z=tzω(s)ω=[p11+p12k(i-p22k)-1p21]ω;
30、s204、汽车发动机鲁棒控制综合设计:通过定义不确定性,权重函数和h∞鲁棒控制。
31、优选的,步骤三中,改进滑模扰动观测器设计,具体包括以下步骤:
32、s301、滑模扰动观测器方法:定义扰动项为:
33、d(t)=cx(t-δ)-cx(t),其中,δ(t)表示注入时变系统状态和未知干扰信号;
34、s302、改进扰动观测器设计:首先,设计滑模面:
35、其中,l为系统不确定因素,表示不确定因素的观测值;
36、其次,设定并将符号函数sign(s)用sigmoid(s)函数代替:
37、
38、其中,m>0,η1和η2表示自适应项,表示为:
39、
40、其中,t,s,ξ,τ,ηm均为正值常参数。
41、(三)有益效果
42、本发明提供了一种汽车发动机悬置系统控制方法。具备以下有益效果:
43、1、振动控制效果显著提高:通过引入自适应改进扰动观测器,控制系统能够实时估计和补偿发动机产生的振动传递到车辆底盘的效果。使得车辆内的振动水平显著降低,从而提高了驾驶舒适性。
44、2、鲁棒性和稳定性得到增强:引入h∞鲁棒控制器到控制系统中,有效提升了控制系统的稳定性。这种控制方法更能够应对外部环境的变化和不确定性,使系统具备了更强的鲁棒性。
45、3、控制系统的集成和优化:通过集成h∞鲁棒控制和改进的扰动观测器,系统的运行效率得到了提高。控制器和观测器之间的协调性也得到了改善,从而优化了控制系统的整体性能。
46、综上所述,基于h∞鲁棒控制的改进扰动观测器的汽车发动机悬置系统控制方法通过创新的技术手段有效地提高了振动控制的效果,为提升驾驶员舒适性和车辆性能带来了明显的技术进步。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。