基于双目视觉的异物位置检测方法、装置及存储介质与流程
- 国知局
- 2024-09-11 14:53:43
本发明涉及图像处理,尤其涉及基于双目视觉的异物位置检测方法、装置及存储介质。
背景技术:
1、随着智能化时代的到来,工业机器越来越多的应用于产品生产。产品的生产过程中,存在焊接、组装、打磨等自动化阶段。上述自动化阶段难免会产生许多金属焊渣、颗粒等异物,异物会留存在产品中。对于高安全性要求的产品,异物会影响产品的使用性能。产品上方设有透明膜,异物可能位于透明膜之上,也可能位于透明膜之下。
2、传统的检测方案一种是人工目检,另一种是采用3d激光扫描检测。人工目检方式由于人眼具有主观性,目测异物位于产品上方透明膜的上方还是下方。人工将产品拿起来检测,会降低检测速度,导致手动测量效率低下。采用激光扫描的方式,由于异物存在的区域相对于平整的底面是一种突兀的变化,且异物的表面一般很不平整,激光扫描很容易丢值,因此3d激光扫描无法准确检测异物位置。如何实现自动化快速检测产品中异物位置成为亟待解决的问题。
技术实现思路
1、本发明提供了一种基于双目视觉的异物位置检测方法、装置及存储介质,以解决目前产品中异物位置检测效率低的问题。
2、根据本发明的第一方面,提供了一种基于双目视觉的异物位置检测方法,待检测产品置于物流线上,第一相机和第二相机位于物流线上方同一高度处,用于拍摄待检测产品,所述待检测产品上表面具有透明膜,该方法包括:
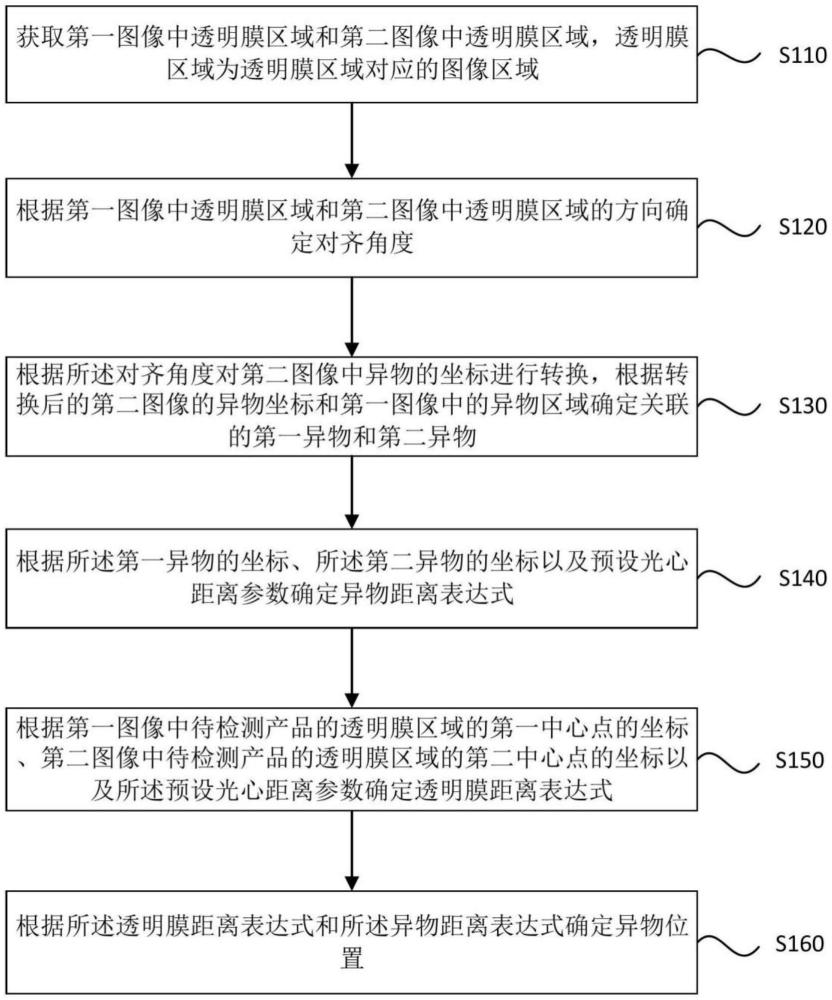
3、获取第一图像中透明膜区域和第二图像中透明膜区域,透明膜区域为透明膜区域对应的图像区域;
4、根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度;
5、根据所述对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物,所述第一异物为第一图像中的异物,所述第二异物为第二图像中的异物,所述第一异物和所述第二异物指向同一个异物实体;
6、根据所述第一异物的坐标、所述第二异物的坐标以及预设光心距离参数确定异物距离表达式,所述异物距离表达式为异物实体到第一相机和第二相机光心的距离的表达式;
7、根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及所述预设光心距离参数确定透明膜距离表达式;
8、根据所述透明膜距离表达式和所述异物距离表达式确定异物位置。
9、根据本发明的第二方面,提供了一种基于双目视觉的异物位置检测装置,待检测产品置于物流线上,第一相机和第二相机位于物流线上方同一高度处,用于拍摄待检测产品,所述待检测产品上表面具有透明膜,所述装置包括:
10、透明区域获取模块,用于获取第一图像中透明膜区域和第二图像中透明膜区域,透明膜区域为透明膜区域对应的图像区域;
11、对齐角度确定模块,用于根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度;
12、关联异物确定模块,用于根据所述对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物,所述第一异物为第一图像中的异物,所述第二异物为第二图像中的异物,所述第一异物和所述第二异物指向同一个异物实体;
13、异物距离确定模块,用于根据所述第一异物的坐标、所述第二异物的坐标以及预设光心距离参数确定异物距离表达式,所述异物距离表达式为异物实体到第一相机和第二相机光心的距离的表达式;
14、透明膜距离确定模块,用于根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及所述预设光心距离参数确定透明膜距离表达式;
15、异物位置确定模块,用于根据所述透明膜距离表达式和所述异物距离表达式确定异物位置。
16、根据本发明的第三方面,提供了一种电子设备,所述电子设备包括:
17、至少一个处理器;以及
18、与所述至少一个处理器通信连接的存储器;其中,
19、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行任一实施例所述的基于双目视觉的异物位置检测方法。
20、根据本发明的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的基于双目视觉的异物位置检测方法。
21、本发明提供的技术方案,获取第一图像中透明膜区域和第二图像中透明膜区域;根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度;根据所述对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物;根据所述第一异物的坐标、所述第二异物的坐标以及预设光心距离参数确定异物距离表达式;根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及所述预设光心距离参数确定透明膜距离表达式;根据所述透明膜距离表达式和所述异物距离表达式确定异物位置。相对于目前人工手动检查异物位置或者3d激光扫描的方式,本发明提供的技术方案能够根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度,根据对齐角度对第二图像进行旋转,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物,能够准确的确定关联的第一异物和第二异物,实现关联异物的准确识别。根据所述第一异物的坐标、所述第二异物的坐标以及预设光心距离参数确定异物距离表达式,根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及所述预设光心距离参数确定透明膜距离表达式,实现基于图像进行异物距离表达式以及透明膜距离表达式的准确计算。根据所述透明膜距离表达式和所述异物距离表达式确定异物位置,实现自动化的确定异物位置,提高异物位置检测效率。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种基于双目视觉的异物位置检测方法,其特征在于,待检测产品置于物流线上,第一相机和第二相机位于物流线上方同一高度处,用于拍摄待检测产品,所述待检测产品上表面具有透明膜,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度,包括:
3.根据权利要求2所述的方法,其特征在于,获取第一图像中透明膜区域的第一特征点,根据第一特征点确定第一矢量线,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物,包括:
5.根据权利要求1所述的方法,其特征在于,根据所述第一异物的坐标、所述第二异物的坐标以及预设光心距离参数确定异物距离表达式,包括:
6.根据权利要求5所述的方法,其特征在于,根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及所述预设光心距离参数确定透明膜距离表达式,包括:
7.根据权利要求5所述的方法,其特征在于,在根据所述对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物之后,还包括:
8.一种基于双目视觉的异物位置检测装置,其特征在于,待检测产品置于物流线上,第一相机和第二相机位于物流线上方同一高度处,用于拍摄待检测产品,所述待检测产品上表面具有透明膜,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的基于双目视觉的异物位置检测方法。
技术总结本发明公开了一种基于双目视觉的异物位置检测方法、装置及存储介质。该方法包括:根据第一图像中透明膜区域和第二图像中透明膜区域的方向确定对齐角度;根据对齐角度对第二图像中异物的坐标进行转换,根据转换后的第二图像的异物坐标和第一图像中的异物区域确定关联的第一异物和第二异物;根据第一异物的坐标、第二异物的坐标以及预设光心距离参数确定异物距离表达式;根据第一图像中待检测产品的透明膜区域的第一中心点的坐标、第二图像中待检测产品的透明膜区域的第二中心点的坐标以及预设光心距离参数确定透明膜距离表达式;根据透明膜距离表达式和异物距离表达式确定异物位置。上述过程无需人工参与,能够实现自动化的确定异物位置,提高异物位置检测效率。技术研发人员:张广顺,许江华,何铭仪,沈伟亮,卢天华,倪军受保护的技术使用者:安脉时代智能制造(宁德)有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292486.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表