海上协同搜救的任务规划方法、装置、设备及存储介质
- 国知局
- 2024-09-14 14:41:01
本技术涉及海上搜救,特别是涉及一种海上协同搜救的任务规划方法、装置、设备及存储介质。
背景技术:
1、海上最优搜寻规划理论是在搜寻区域确定的基础上,调度搜救力量,分配搜寻任务,以寻求搜救资源在时间和空间上最优分配方式,在较短时间内尽可能在资源消耗最小情况下,获取较大的搜救成功概率(probability of containment,poc)。
2、目前实际搜救过程中搜寻方案的制定过多依赖于主观决策者的主观判断与人工经验指导,行动的组织存在一定的盲目性,搜寻任务规划缺乏系统性。
3、因此,发展定量化的搜救协同策略与技术,建立科学、高效、易实施的多力量协同搜救规划方案尤为重要。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够有效提高搜救成功率的海上协同搜救的任务规划方法、装置、设备及存储介质。
2、一种海上协同搜救的任务规划方法,所述方法包括:
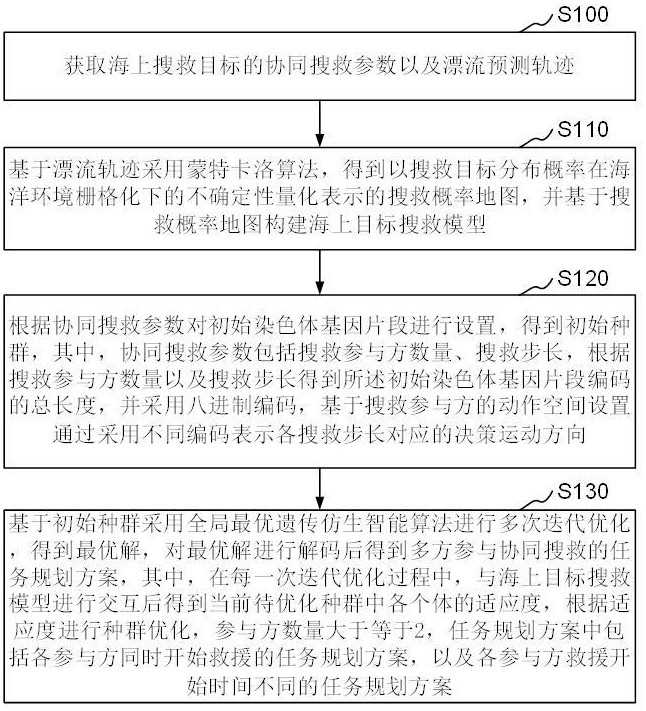
3、获取海上搜救目标的协同搜救参数以及漂流预测轨迹;
4、基于所述漂流预测轨迹采用蒙特卡洛算法,得到以搜救目标分布概率在海洋环境栅格化下的不确定性量化表示的搜救概率地图,并基于所述搜救概率地图构建海上目标搜救模型;
5、根据所述协同搜救参数对初始染色体基因片段进行设置,得到初始种群,其中,所述协同搜救参数包括搜救参与方数量、搜救步长,根据所述搜救参与方数量以及搜救步长得到所述初始染色体基因片段编码的总长度,并采用八进制编码,基于所述搜救参与方的动作空间设置通过采用不同编码表示各搜救步长对应的决策运动方向;
6、基于所述初始种群采用全局最优遗传仿生智能算法进行多次迭代优化,得到最优解,对所述最优解进行解码后得到多方参与协同搜救的任务规划方案,其中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据所述适应度进行种群优化,所述参与方数量大于等于2,所述任务规划方案中包括各参与方同时开始救援的任务规划方案,以及各参与方救援开始时间不同的任务规划方案。
7、在其中一实施例中,根据所述搜救概率地图、搜救概率地图更新机制、针对搜救参与方的动作空间设置以及搜救成功累计值函数构建海上目标搜救模型。
8、在其中一实施例中,所述搜救概率地图更新机制表示为当搜救参与方完成一处栅格子海域的搜索后,根据搜救结果对该处栅格子海域的状态以及目标存在概率对所述搜救概率地图进行更新,其中,所述栅格子海域的状态包括未被搜寻、已被搜寻以及正在被搜寻。
9、在其中一实施例中,所述针对搜救参与方的动作空间设置为:以所述搜救参与方当前处于所述搜救概率地图中某一栅格子海域为中心,分别向四周临近栅格子海域进行移动的多个运动方向。
10、在其中一实施例中,采用八进制编码,基于所述搜救参与方的动作空间设置通过采用不同编码表示各搜救步长对应的决策运动方向包括:利用八进制编码0-7分别表示下一步决策运动方向,所述运动方向包括向上、向右上、向右、向右下、向下、向左下、向左和向左上。
11、在其中一实施例中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,采用适应度函数计算得到,所述适应度函数根据所述搜救成功累计值函数得到,表示为:
12、;
13、在上式中,为搜救参与方是否搜寻栅格子海域(m, n)的[0,1]判断,代表该区域的poc量化值,表示为目标海域划分成个栅格, 将每个网格的中心点坐标作为该网格的位置坐标,表示区域内分布概率。
14、在其中一实施例中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据所述适应度进行种群优化,包括:
15、采用轮盘选择法作为选择算子,选择当前待优化种群中适应度高的个体生成第一新种群;
16、在所述第一新种群中提取出适应度最大的个体,对剩余种群中被选中的个体采用交叉算子进行配对交叉,生成新个体,并加入提取出去的适应度最大的个体,形成第二新种群;
17、在所述第二新种群中提取出适应度最大的个体,对剩余种群中使用变异算子进行变异操作后,加入提取出去的适应度最大的个体,形成当次迭代优化得到的中间优化种群;
18、根据所述中间优化种群进行一下次的迭代优化,直至迭代次数满足预设次数,则得到所述最优解。
19、本技术还提供了一种海上协同搜救的任务规划装置,所述装置包括:
20、数据获取模块,用于获取海上搜救目标的协同搜救参数以及漂流预测轨迹;
21、海上目标搜救模型构建模块,用于基于所述漂流预测轨迹采用蒙特卡洛算法,得到以搜救目标分布概率在海洋环境栅格化下的不确定性量化表示的搜救概率地图,并基于所述搜救概率地图构建海上目标搜救模型;
22、初始种群得到模块,用于根据所述协同搜救参数对初始染色体基因片段进行设置,得到初始种群,其中,所述协同搜救参数包括搜救参与方数量、搜救步长,根据所述搜救参与方数量以及搜救步长得到所述初始染色体基因片段编码的总长度,并采用八进制编码,基于所述搜救参与方的动作空间设置通过采用不同编码表示各搜救步长对应的决策运动方向;
23、迭代优化任务规划模块,用于基于所述初始种群采用全局最优遗传仿生智能算法进行多次迭代优化,得到最优解,对所述最优解进行解码后得到多方参与协同搜救的任务规划方案,其中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据所述适应度进行种群优化,所述参与方数量大于等于2,所述任务规划方案中包括各参与方同时开始救援的任务规划方案,以及各参与方救援开始时间不同的任务规划方案。
24、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
25、获取海上搜救目标的协同搜救参数以及漂流预测轨迹;
26、基于所述漂流预测轨迹采用蒙特卡洛算法,得到以搜救目标分布概率在海洋环境栅格化下的不确定性量化表示的搜救概率地图,并基于所述搜救概率地图构建海上目标搜救模型;
27、根据所述协同搜救参数对初始染色体基因片段进行设置,得到初始种群,其中,所述协同搜救参数包括搜救参与方数量、搜救步长,根据所述搜救参与方数量以及搜救步长得到所述初始染色体基因片段编码的总长度,并采用八进制编码,基于所述搜救参与方的动作空间设置通过采用不同编码表示各搜救步长对应的决策运动方向;
28、基于所述初始种群采用全局最优遗传仿生智能算法进行多次迭代优化,得到最优解,对所述最优解进行解码后得到多方参与协同搜救的任务规划方案,其中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据所述适应度进行种群优化,所述参与方数量大于等于2,所述任务规划方案中包括各参与方同时开始救援的任务规划方案,以及各参与方救援开始时间不同的任务规划方案。
29、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
30、获取海上搜救目标的协同搜救参数以及漂流预测轨迹;
31、基于所述漂流预测轨迹采用蒙特卡洛算法,得到以搜救目标分布概率在海洋环境栅格化下的不确定性量化表示的搜救概率地图,并基于所述搜救概率地图构建海上目标搜救模型;
32、根据所述协同搜救参数对初始染色体基因片段进行设置,得到初始种群,其中,所述协同搜救参数包括搜救参与方数量、搜救步长,根据所述搜救参与方数量以及搜救步长得到所述初始染色体基因片段编码的总长度,并采用八进制编码,基于所述搜救参与方的动作空间设置通过采用不同编码表示各搜救步长对应的决策运动方向;
33、基于所述初始种群采用全局最优遗传仿生智能算法进行多次迭代优化,得到最优解,对所述最优解进行解码后得到多方参与协同搜救的任务规划方案,其中,在每一次迭代优化过程中,与所述海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据所述适应度进行种群优化,所述参与方数量大于等于2,所述任务规划方案中包括各参与方同时开始救援的任务规划方案,以及各参与方救援开始时间不同的任务规划方案。
34、上述海上协同搜救的任务规划方法、装置、设备及存储介质,通过基于漂流轨迹采用蒙特卡洛算法,得到以搜救目标分布概率在海洋环境栅格化下的不确定性量化表示的搜救概率地图,并基于搜救概率地图构建海上目标搜救模型,同时,根据协同搜救参数对初始染色体基因片段进行设置得到初始种群,基于初始种群采用全局最优遗传仿生智能算法进行多次迭代优化,得到最优解,对其进行解码后得到多方参与协同搜救的任务规划方案,其中,在每一次迭代优化过程中,与海上目标搜救模型进行交互后得到当前待优化种群中各个体的适应度,根据适应度进行种群优化。采用本方法可得到搜救成功率高的多方参与的协同搜救任务规划方案。
本文地址:https://www.jishuxx.com/zhuanli/20240914/295497.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表