构网型微网逆变器的控制方法
- 国知局
- 2024-09-19 14:34:14
本发明属于逆变器控制方法,具体涉及构网型微网逆变器的控制方法。
背景技术:
1、由于能源结构的调整,采用以电力电子设备作为接口的分布式电源在电力系统中的渗透率逐年上升。在微网中,分布式新能源发电系统一般通过逆变器接入,有孤岛运行与并网运行两种状态,其常见的控制策略为恒功率控制、下垂控制等。其中下垂控制虽可即插即用,但对系统的惯量贡献甚微,若分布式电源比重升高,则导致微网惯量降低,不利于系统稳定运行。在孤岛运行时,由于无大电网支撑,需要逆变器具备构网能力。针对上述存在的问题,诸多学者将虚拟同步发电机(virtual synchronous generator,vsg)技术应用于微网逆变器控制中,使逆变器模拟出同步发电机的阻尼和转动惯量,提高电网稳定性。
2、然而,传统控制模式下的微网逆变器虚拟同步发电机控制策略底层采用电压电流双环结构,存在多个控制环路需进行多次坐标变换环节,参数难以整定及动态响应能力有限等问题。
技术实现思路
1、本发明的目的是提供网型微网逆变器的控制方法,解决了传统vsg底层控制方式中参数整定繁琐的问题。
2、本发明所采用的技术方案是,构网型微网逆变器的控制方法,具体按照以下步骤实施:
3、步骤1、构建虚拟同步发电机的控制策略;
4、步骤2、构建逆变器输出电压空间矢量模型;
5、步骤3、构建模型预测电压控制算法。
6、本发明技术方案的特点还在于:
7、步骤1中调速器方程根据逆变器的实际角频率ω、额定角频率ω0以及额定有功功率pref计算得到机械功率pm;转子方程根据机械功率pm以及额定角频率ω0计算得出励磁电动势的相角θ;通过三相电压合成得到最终的励磁电动势ea,eb,ec;励磁调节方程根据额定无功功率qref、逆变器实际输出的无功功率qe以及额定电动势幅值e0计算得到逆变器励磁电动势幅值em大小;最后引入虚拟阻抗,由定子电磁方程控制得到逆变器端口输出电压u。
8、步骤1具体按照以下步骤实施:
9、步骤1.1:根据传统同步机有功-频率下垂特性得到一次调频方程,具体公式为:
10、pm=pref+kp(ω0-ω) (1)
11、其中,pm为虚拟原动机输出机械功率;pref为额定有功功率;kp为有功-频率控制下垂系数;ω0为额定角频率;ω为vsg实际输出角频率;
12、步骤1.2:vsg输出电磁功率pe,qe,具体计算公式为:
13、
14、其中,pe为输出有功功率;qe为输出无功功率;uoα,uoβ分别为输出电压在αβ轴上的分量;ioα,ioβ分别为输出电流在αβ轴上的分量;
15、步骤1.3:为了模拟转子的转动惯量,以获取vsg实际输出相位角θ,由同步发电机的二阶数学模型等效vsg的转子运动方程,具体公式为:
16、
17、其中,j为惯性系数;pe为输出电磁功率;d为阻尼系数;θ为vsg输出相位角;
18、步骤1.4:依据电压幅值参考量与实际值的偏差,调整无功功率指令,在增加调压器后虚拟同步发电机的无功-电压控制方程,具体公式为:
19、
20、其中,k为积分系数;kq为下垂系数;qref为vsg无功功率设定值;qe为vsg输出的无功功率值;em为虚拟电势参考幅值;e0为额定电动势幅值;uref为机端电压参考值;u为逆变器端口输出电压;
21、通过三相电压合成得到最终的励磁电动势e,具体公式为:
22、
23、步骤1.5:vsg输出端电压u是由励磁电动势减去输出电流在虚拟阻抗上的压降得到,具体公式为:
24、
25、其中,为vsg的输出电压相量值;为逆变器的励磁电动势相量值;为定子电流相量值;ra为虚拟电阻;xa为虚拟电感;j为虚数。
26、步骤2中根据两电平逆变器开关互补工作原理构建了开关函数sk,并推导出桥臂输出电压空间矢量模型,计算出不同开关状态下的电压矢量在αβ坐标轴上的分量uiα、uiβ。
27、步骤2具体按照以下步骤实施:
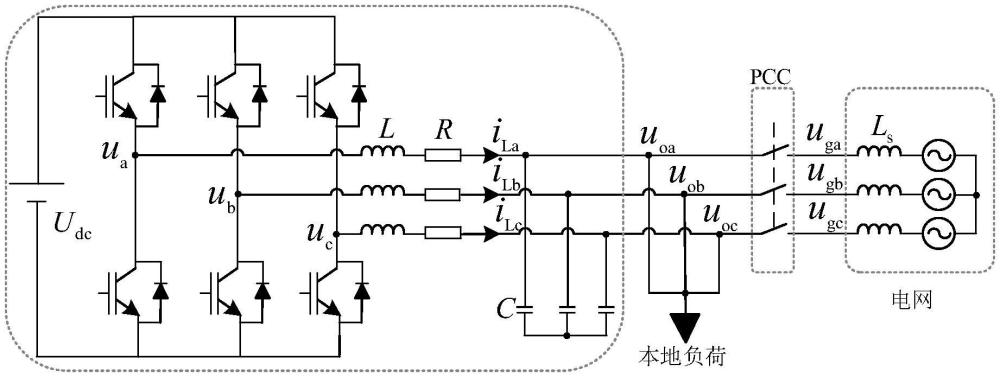
28、步骤2.1:根据主电路结构图,由逆变器桥臂开关互补原理,可构建开关函数模型为:
29、
30、其中,sk(k=a,b,c)表示a,b,c三相桥臂对应的开关状态;1表示同一桥臂的上桥臂开通;0表示同一桥臂的下桥臂开通;
31、步骤2.2:逆变器桥臂输出的相电压具体公式为:
32、uik=skudc (8)
33、其中,uik(k=a,b,c)分别为逆变器a,b,c三相输出相电压;sk为定义的开关函数;udc为直流侧电压值;
34、步骤2.3:考虑输出矢量有8个不同的电压矢量,对应8个不同的开关序列组合。电压矢量可定义为:
35、
36、其中,旋转因子a=ej2π3;uia、uib、uic分别为逆变器输出相电压;u为逆变器输出电压矢量;sa,sb,sc分别表示a,b,c三相桥臂的开关状态。
37、步骤3中通过引入lc滤波电感、电容在连续时域下的微分方程,建立变量空间状态方程;由前向欧拉法对状态空间方程进行离散化可得预测输出电压uoαβ(k+1);考虑延时补偿,对预测输出电压进一步迭代得出uoαβ(k+2);由预测电压值与真实值的最大误差量为最小原则构建价值函数gi进行寻优。
38、步骤3具体按照以下步骤实施:
39、步骤3.1:根据基尔霍夫定律得出lc滤波器在连续时域的微分方程为:
40、
41、其中,l为滤波电感;il为电感电流;c为滤波电容;uc为电容电压;io为vsg输出电流;uo为vsg输出电压;r为电感寄生电阻;u为桥臂侧输出电压;
42、步骤3.2:在αβ两相静止坐标系下,三相逆变器的数学模型为解耦的形式,因此采用αβ坐标系下的逆变器数学模型进行模型预测电压控制的建立,恒幅值clark变换具体公式为:
43、
44、对式(10)进行clark坐标变换,以uoα,uoβ,ilα,ilβ为状态变量,得到状态空间方程为:
45、
46、其中,x=[uoα,uoβ,ilα,ilβ]t为状态变量;为对状态变量求微分;u=[uα,uβ]t为输入变量;us=[ioα,ioβ]t为扰动变量;y=[uoα,uoβ]为输出变量;状态矩阵输入矩阵扰动矩阵输出矩阵
47、步骤3.3:由前向欧拉法对式(12)进行离散化可得系统得预测模型:
48、
49、其中,x(k+1)为k+1时刻状态变量的预测值,ts为采样周期;x(k)为k时刻状态变量值;
50、为减小算法延迟,提高电能质量,在k时刻测量状态变量并实施由上一周期所得到的最优开关状态,根据式(13)预测所得k+1时刻的输出量,再由k+1时刻的输出为起点预测k+2时刻的输出,对式(13)所得预测控制方程进一步迭代可得输出电压两步预测模型,具体公式为:
51、
52、其中,uαβ(k),ilαβ(k),ioαβ(k)分别表示三相桥臂输出电压、电感电流、输出电流在k时刻在αβ轴上的分量ilαβ(k+1),ioαβ(k+1),uoαβ(k+1)分别表示电感电流、输出电流、输出电压k+1时刻在αβ轴上的分量;ts为采样周期;uoαβ(k+2)为输出电压k+2时刻在αβ轴上分量预测输出值;
53、步骤3.4:通过矢量角补偿法得出k+2时刻的参考电压值,具体公式为:
54、
55、其中,uref(k+2)为k+2时刻预测输出参考电压值;uref(k)为k时刻电压参考值;θ(k)为k时刻输出电压角度;ω为vsg控制环输出角频率;
56、由预测电压值与真实值的最大误差量为最小原则构建价值函数,具体公式为:
57、
58、其中,分别为k+2时刻参考电压矢量在αβ轴上的分量;uoα(k+2),uoβ(k+2)分别为k+2时刻预测输出电压矢量在αβ轴上的分量;
59、步骤3.5:模型预测电压控制算法逻辑;
60、步骤3.5具体为:在k时刻开始时实施上一个控制周期计算得到的最优开关序列,同时测量逆变器的状态向量、扰动向量,并根据上一时刻开关序列对应的输入向量预测k+1时刻的最优输出向量x2(k+1),以x2(k+1)为起点,根据预测模型预测k+2时刻的8组备选预测输出向量;模型预测控制器首先遍历控制集中每个开关状态组合,分别利用预测模型计算出相对应的vsg输出电压预测值,随后进行代价函数(式(16))寻优,每组预测值均可求得一个代价函数值g,最后,模型预测控制器在8个代价函数值中,选择令值最小的预测值所对应的开关状态作为下一个时刻的控制量输出。
61、本发明的有益效果是:
62、1)本发明采用mpc取代电压电流双环控制结构及脉冲宽度调制环节,减少了pi参数整定环节,优化了控制结构及消除了系统带宽的限制,显著提升了系统的动态响应速度。
63、2)本发明通过将vsg与mpc相结合,实现了对三相逆变器的有效控制,在保持逆变器输出惯性的同时,提供了电压和频率支撑,提高了输出电能质量。
64、3)本发明相较于vsg电压电流双环控制,vsg模型预测电压控制方法具有较好的跟踪性,在负载突变时可有效改善暂态过程中频率动态特性,提高了系统的稳定性能。
本文地址:https://www.jishuxx.com/zhuanli/20240919/298896.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表