一种提升角点寻找效率的方法、装置、介质及设备与流程
- 国知局
- 2024-09-19 14:35:18
本申请涉及摄像模组标定,尤其涉及一种提升角点寻找效率的方法、装置、介质及设备。
背景技术:
1、为消除摄像头由于本身特性导致拍摄画面变形的因素,一般在摄像模组出厂前,都需要对摄像模组进行标定。无论是单摄的内参标定,还是双摄的相对标定,经常以棋盘格背景作为拍摄图案,然后棋盘格中黑白格相邻的角点作为参照点对摄像模组的参数进行标定。
2、那么,在标定之前,需要在摄像模组拍摄的图像中寻找并确定出棋盘格的角点。但是由于实际生产环境较为复杂,特别是对于大广角和长焦的摄像头模组,在利用摄像模组进行拍摄时,经常会拍摄到生产区域的场景。生产区域中也会存在很多个小矩形,因此对寻找焦点造成干扰,导致寻找角点的效率变低,进而影响对摄像模组的标定效率。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供了一种提升角点寻找效率的方法、装置、介质及设备,以解决或者部分解决现有技术中在对摄像模组标定时,由于棋盘格角点的寻找效率较低,影响摄像模组标定效率的技术问题。
2、本发明的第一方面,提供一种提升角点寻找效率的方法,所述方法包括:
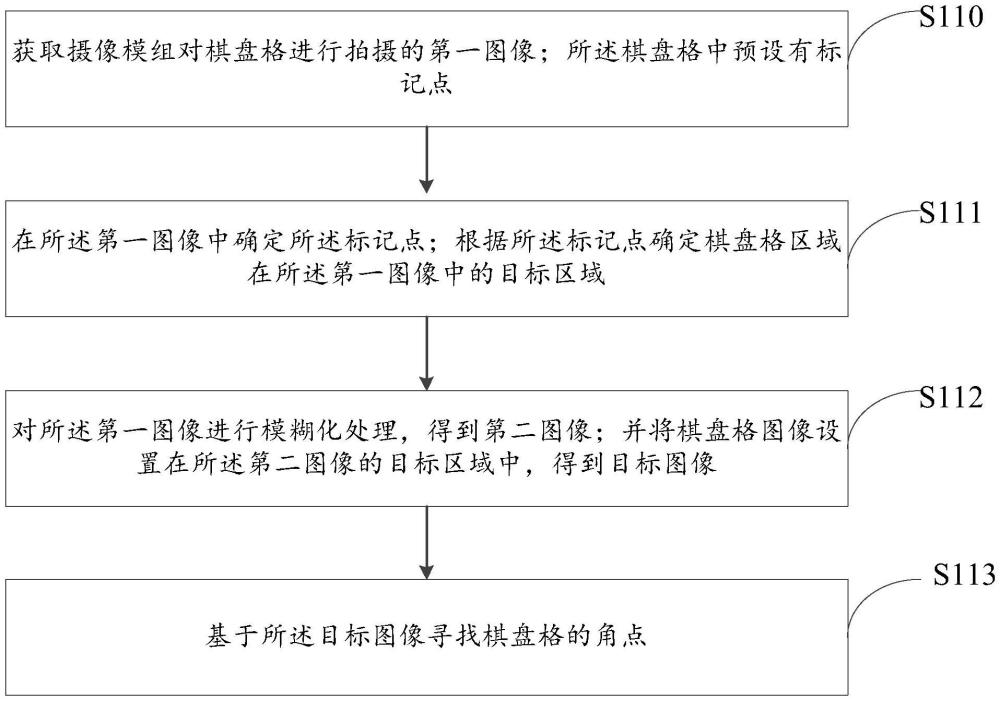
3、获取摄像模组对棋盘格背景进行拍摄的第一图像;所述棋盘格中预设有标记点;
4、在所述第一图像中确定所述标记点;根据所述标记点确定棋盘格区域在所述第一图像中的目标区域;
5、对所述第一图像进行模糊化处理,得到第二图像;并将棋盘格图像设置在所述第二图像的目标区域中,得到目标图像;
6、基于所述目标图像寻找棋盘格的角点。
7、上述方案中,所述在所述第一图像中确定所述标记点,包括:
8、对所述第一图像进行预处理,获得第三图像;
9、基于预设的轮廓周长阈值在所述第三图像中寻找第一轮廓;
10、确定每个所述第一轮廓的外接矩形,基于预设的外接矩形长宽比阈值对所述第一轮廓进行筛选,获得第二轮廓;
11、基于预设的筛选策略对所述第二轮廓进行筛选,获得所述标记点。
12、上述方案中,所述基于预设的筛选策略对所述第二轮廓进行筛选,包括:
13、针对任一第二轮廓,确定出所述第二轮廓的外接圆,并获得所述外接圆的圆心和半径;
14、确定第二轮廓上的每个像素点与所述圆心之间的距离绝对值,并确定各距离绝对值的平均值;
15、若确定所述半径在预设的半径阈值内,且确定各距离绝对值的平均值小于距离阈值,则将所述第二轮廓确定为所述标记点。
16、上述方案中,所述将所述第二轮廓确定为所述标记点后,所述方法还包括:
17、若确定所述第二轮廓的数量大于所述标记点的预设数量,则以任意一个标记点为参考点,获取所述参考点与剩余标记点之间的距离;
18、若确定所述参考点与剩余标记点之间的距离未在预设的距离阈值范围内,则从所述标记点中去除所述参考点。
19、上述方案中,所述根据所述标记点确定棋盘格区域在所述第一图像中的目标区域,包括:
20、获取各所述标记点的坐标,所述标记点包括三个,分别为:第一标记点、第二标记点和第三标记点;
21、根据所述第一标记点的坐标和所述第二标记点的坐标确定坐标修正值;所述第一标记点和所述第二标记点为水平相邻的两个标记点;
22、根据棋盘格水平方向上的第一格子数量、竖直方向上的第二格子数量、所述坐标修正值、棋盘格每个单元格的边长、所述第一标记点的坐标、所述第二标记点的坐标以及所述第三标记点的坐标确定所述目标区域的左边界横坐标、右边界横坐标、上边界纵坐标和下边界纵坐标;
23、根据所述左边界横坐标、所述右边界横坐标、所述上边界纵坐标和所述下边界纵坐标确定所述目标区域。
24、上述方案中,根据所述第一标记点的坐标和所述第二标记点的坐标确定坐标修正值,包括:
25、确定所述第一标记点的纵坐标与所述第二标记点的纵坐标之间的纵坐标差值;
26、确定所述第一标记点的横坐标与所述第二标记点的横坐标之间的横坐标差值;
27、确定所述纵坐标差值与所述横坐标差值的比值绝对值,所述比值绝对值为所述坐标修正值。
28、上述方案中,所述根据棋盘格水平方向上的第一格子数量、竖直方向上的第二格子数量、所述坐标修正值、棋盘格每个单元格的边长、所述第一标记点的坐标、所述第二标记点的坐标以及所述第三标记点的坐标确定所述目标区域的左边界横坐标、右边界横坐标、上边界纵坐标和下边界纵坐标,包括:
29、根据公式确定所述左边界横坐标left;
30、根据公式确定所述右边界横坐标right;
31、根据公式确定所述上边界纵坐标top;
32、根据公式确定所述下边界纵坐标bottom;其中,
33、所述ltx为所述第一标记点的横坐标,所述corx为棋盘格水平方向上的第一格子数量,所述cory为棋盘格竖直方向上的第二格子数量,所述y为所述坐标修正值,所述rtx为所述第一标记点的横坐标,所述lty为所述第一标记点的纵坐标,所述bry为所述第三标记点的纵坐标。
34、本发明的第二方面,提供一种提升角点寻找效率的装置,所述装置包括:
35、获取单元,用于获取摄像模组对棋盘格背景进行拍摄的第一图像;所述棋盘格中预设有标记点;
36、确定单元,用于在所述第一图像中确定所述标记点;根据所述标记点确定棋盘格区域在所述第一图像中的目标区域;对所述第一图像进行模糊化处理,得到第二图像;并将棋盘格图像设置在所述第二图像的目标区域中,得到目标图像;
37、寻找单元,用于基于所述目标图像寻找棋盘格的角点。
38、本发明的第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时第一方面中任一项所述方法的步骤。
39、本发明的第四方面,提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面中任一项所述方法的步骤。
40、本发明提供了一种提升角点寻找效率的方法、装置、介质及设备,方法包括:获取摄像模组对棋盘格背景进行拍摄的第一图像;所述棋盘格中预设有标记点;在所述第一图像中确定所述标记点;根据所述标记点确定棋盘格区域在所述第一图像中的目标区域;对所述第一图像进行模糊化处理,得到第二图像;并将棋盘格图像设置在所述目标区域中,得到目标图像;基于所述目标图像寻找棋盘格的角点;如此,在棋盘格中预先设置标记点,摄像模组对棋盘格拍摄获得第一图像后,可以在第一图像中寻找到标记点位置,再根据标记点位置确定棋盘格图像所处的目标区域,然后基于目标区域可将棋盘格图像保持清晰状态,去除第一图像中的干扰图像,最终在目标图像中寻找棋盘格的角点时,可降低生产区域图像的干扰,提高角点寻找的效率,进而提高摄像模组的标定效率。
技术特征:1.一种提升角点寻找效率的方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述在所述第一图像中确定所述标记点,包括:
3.如权利要求2所述的方法,其特征在于,所述基于预设的筛选策略对所述第二轮廓进行筛选,包括:
4.如权利要求3所述的方法,其特征在于,所述将所述第二轮廓确定为所述标记点后,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,所述根据所述标记点确定棋盘格区域在所述第一图像中的目标区域,包括:
6.如权利要求5所述的方法,其特征在于,根据所述第一标记点的坐标和所述第二标记点的坐标确定坐标修正值,包括:
7.如权利要求5所述的方法,其特征在于,所述根据棋盘格水平方向上的第一格子数量、竖直方向上的第二格子数量、所述坐标修正值、棋盘格每个单元格的边长、所述第一标记点的坐标、所述第二标记点的坐标以及所述第三标记点的坐标确定所述目标区域的左边界横坐标、右边界横坐标、上边界纵坐标和下边界纵坐标,包括:
8.一种提升角点寻找效率的装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7任一项所述方法的步骤。
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1-7任一项所述方法的步骤。
技术总结本发明提供一种提升角点寻找效率的方法、装置、介质及设备,包括:获取摄像模组对棋盘格拍摄的第一图像;棋盘格中预设有标记点;在第一图像中确定标记点;根据标记点确定棋盘格区域在第一图像中的目标区域;对第一图像进行模糊化处理得到第二图像;将棋盘格图像设置在第二图像的目标区域中得到目标图像;基于目标图像寻找棋盘格的角点;如此,在棋盘格中预先设置标记点,对棋盘格拍摄获得第一图像后,可在第一图像中寻找到标记点位置,再根据标记点位置确定棋盘格图像所处的目标区域,然后基于目标区域保持棋盘格图像为清晰状态,去除第一图像中的干扰图像,最终在目标图像中寻找棋盘格的角点时,可降低生产区域图像的干扰,提高角点寻找的效率。技术研发人员:蒋明杰受保护的技术使用者:昆山丘钛光电科技有限公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299012.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表