基于HRRP空间特征提取的目标识别方法、装置及设备
- 国知局
- 2024-10-09 16:05:33
本申请涉及雷达信号,特别是涉及一种hrrp空间特征提取的目标识别方法、装置及设备。
背景技术:
1、雷达自动目标识别(radar auto target recognition, ratr)在航空安全领域发挥着重要作用,如何快速、准确、稳健地对空天目标进行识别是ratr的主要任务。而在雷达信号领域中,一维高分辨距离像(high range resolution profile,hrrp)数据通常通过宽带雷达获取,数据中包含大量关于目标的尺寸、物理构型和散射分布等可分性信息,因此hrrp常用于ratr任务。对于hrrp数据,如何能够充分挖掘hrrp数据中关于目标的可分性信息以提高对于目标识别算法性能是现阶段ratr领域亟待解决的问题。
2、现有方法主要分为传统信号处理方法与深度学习方法两大类。传统信号处理方法通过模板匹配方法对雷达信号中的统计特征、数理特征进行提取、匹配以实现目标的识别,然而传统方法的识别率较低。近年来,基于深度学习的ratr方法逐渐兴起。这些方法基于大量数据样本,通过端到端的模型对hrrp数据中的目标特征进行提取,最终取得较高的识别性能。然而这些方法在数据缺失情况下表现欠佳。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高识别算法的识别精度与稳健性的基于hrrp空间特征提取的目标识别方法、装置及设备。
2、一种基于hrrp空间特征提取的目标识别方法,所述方法包括:
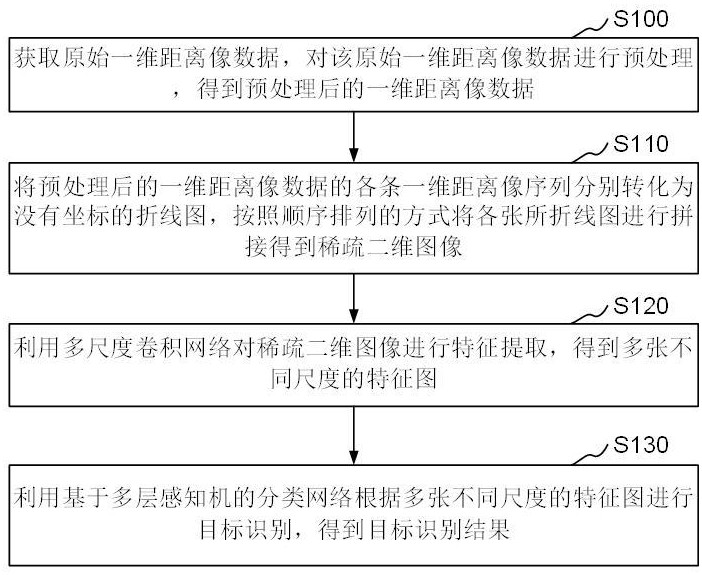
3、获取原始一维距离像数据,对所述原始一维距离像数据进行预处理,得到预处理后的一维距离像数据;
4、将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张所述折线图进行拼接得到稀疏二维图像;
5、利用多尺度卷积网络对所述稀疏二维图像进行特征提取,得到多张不同尺度的特征图;
6、利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别,得到目标识别结果。
7、在其中一实施例中,所述对所述原始一维距离像数据进行预处理,包括:
8、对所述原始一维距离像数据进行取幅度处理,得到实数一维距离像数据;
9、采用取模2范数归一化对实数一维距离像数据进行幅度归一化处理,得到归一化后的一维距离像序列;
10、采用重心对齐法对所述归一化后的一维距离像数据进行循环移位操作,得到所述预处理后的一维距离像数据。
11、在其中一实施例中,采用取模2范数归一化对实数一维距离像数据进行幅度归一化处理,表示为:
12、;
13、在上式中,表示所述归一化后的一维距离像序列,表示实数一维距离像数据,表示距离单元总数。
14、在其中一实施例中,采用重心对齐法对所述归一化后的一维距离像数据进行循环移位操作,序列重心可以采用以下公式计算得到:
15、;
16、在上式中,表示对取模值,表示距离单元总数,表示所述归一化后的一维距离像序列的重心。
17、在其中一实施例中,所述多尺度卷积网络包括依次连接的三层特征提取层,分别由这三层特征提取层提取三张不同尺度的特征图;
18、在各所述特征提取层中均由三个尺寸不同的卷积核分别提取输入数据的特征,再将提取出来的特征进行加权融合后,经过最大池化层得到该层特征提取层的输出数据;
19、其中,所述输入数据为所述稀疏二维图像或上一层特征提取层的输出数据,所述输出数据作为下一层特征提取层的输入数据以及该层特征提取层提取得到的特征图。
20、在其中一实施例中,在所述分类网络中:
21、将多张不同尺度的特征图分别展平为一维向量后,进行拼接操作得到融合特征;
22、利用多层感知机基于所述融合特征进行目标类别的预测,得到所述目标识别结果。
23、在其中一实施例中,所述方法还包括:根据所述多尺度卷积网络以及分类网络构建目标识别网络,将所述稀疏二维图像输入至所述目标识别网络中,得到所述目标识别结果;
24、在对所述目标识别网络进行训练时,采用交叉熵损失函数对所述多尺度卷积网络以及分类网络中的可调节参数进行更新。
25、本申请还提供了一种基于hrrp空间特征提取的目标识别装置,所述装置包括:
26、预处理模块,用于获取原始一维距离像数据,对所述原始一维距离像数据进行预处理,得到预处理后的一维距离像数据;
27、稀疏二维图像得到模块,用于将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张所述折线图进行拼接得到稀疏二维图像;
28、多尺度特征提取模块,用于利用多尺度卷积网络对所述稀疏二维图像进行特征提取,得到多张不同尺度的特征图;
29、目标识别模块,用于利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别,得到目标识别结果。
30、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
31、获取原始一维距离像数据,对所述原始一维距离像数据进行预处理,得到预处理后的一维距离像数据;
32、将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张所述折线图进行拼接得到稀疏二维图像;
33、利用多尺度卷积网络对所述稀疏二维图像进行特征提取,得到多张不同尺度的特征图;
34、利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别,得到目标识别结果。
35、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、获取原始一维距离像数据,对所述原始一维距离像数据进行预处理,得到预处理后的一维距离像数据;
37、将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张所述折线图进行拼接得到稀疏二维图像;
38、利用多尺度卷积网络对所述稀疏二维图像进行特征提取,得到多张不同尺度的特征图;
39、利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别,得到目标识别结果。
40、上述基于hrrp空间特征提取的目标识别方法、装置及设备,通过对原始一维距离像数据进行预处理,将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张折线图进行拼接得到稀疏二维图像,利用多尺度卷积网络对稀疏二维图像进行特征提取,得到多张不同尺度的特征图,利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别得到目标识别结果。采用本方法可以提高识别算法的识别精度与稳健性。
技术特征:1.一种基于hrrp空间特征提取的目标识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的目标识别方法,其特征在于,所述对所述原始一维距离像数据进行预处理,包括:
3.根据权利要求2所述的目标识别方法,其特征在于,采用取模2范数归一化对实数一维距离像数据进行幅度归一化处理,表示为:
4.根据权利要求2所述的目标识别方法,其特征在于,采用重心对齐法对所述归一化后的一维距离像数据进行循环移位操作,其中,序列重心可以采用以下公式计算得到:
5.根据权利要求1至4任意一项所述的目标识别方法,其特征在于,所述多尺度卷积网络包括依次连接的三层特征提取层,分别由这三层特征提取层提取三张不同尺度的特征图;
6.根据权利要求5所述的目标识别方法,其特征在于,在所述分类网络中:
7.根据权利要求6所述的目标识别方法,其特征在于,所述方法还包括:根据所述多尺度卷积网络以及分类网络构建目标识别网络,将所述稀疏二维图像输入至所述目标识别网络中,得到所述目标识别结果;
8.一种基于hrrp空间特征提取的目标识别装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述方法的步骤。
技术总结本申请涉及一种基于HRRP空间特征提取的目标识别方法、装置及设备,通过对原始一维距离像数据进行预处理,将预处理后的一维距离像数据的各条一维距离像序列分别转化为没有坐标的折线图,按照顺序排列的方式将各张折线图进行拼接得到稀疏二维图像,利用多尺度卷积网络对稀疏二维图像进行特征提取,得到多张不同尺度的特征图,利用基于多层感知机的分类网络根据多张不同尺度的特征图进行目标识别得到目标识别结果。采用本方法可以提高识别算法的识别精度与稳健性。技术研发人员:夏靖远,刘云,廖淮璋,李烨,杨志雄,卢哲俊,高勋章受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311636.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表