一种高反射率样品动态三维测量方法及系统
- 国知局
- 2024-10-09 15:07:31
本发明涉及光学三维测量的,尤其涉及一种高反射率样品动态三维测量方法,还涉及一种高反射率样品动态三维测量系统。
背景技术:
1、物体三维形貌的获取具有重要的意义,其中光学三维测量技术具有非接触,快速,系统简单易操作等优点,也是目前非接触式测量应用最广泛的技术,在逆向工程,文物遗产保护,变形检测,以及工业零件质量监测方面都具有了较为成熟的应用。而散斑投影三维测量是应用最为成熟的方法,该方法是向被测物表面投影随机散斑图案,利用相机同步采集不同视角的散斑图案,然后利用立体匹配技术进行匹配处理获得视差图,从而利用三角法恢复三维信息。然而,由于相机的成像动态范围有限,结构光三维测量方法在测量陶瓷瓶,飞机金属外壳,铣削后工业零件等高反光被测物时,大面积的耀光会造成相机成像过饱和,此时使用传统的结构光三维测量方法时,会造成耀光处的结构光信息丢失,造成重建精度下降,甚至出现大面积的数据空洞。
2、针对这一问题,在目前工业应用中,工人们常用的方法是在高反光工件表面喷涂可降解粉末,覆盖高光部分,但这种方法的缺点是显而易见的,喷涂粉末不仅费时费力,而且在被测物表面增加了厚度,测量的准确性将受到喷涂均匀性的影响。除此最成熟和有效的方法是多次曝光法,该方法指对同一视场在相机不同曝光时间下进行一系列的成像,从而融合成一幅避免图像饱和的图像,该方法需要一定数量的投影或成像,这限制了在动态三维测量中的应用。
技术实现思路
1、为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种高反射率样品动态三维测量方法,其只需单帧成像即可实现高动态范围三维测量与重建,为高动态范围的动态三维测量与重建奠定基础。
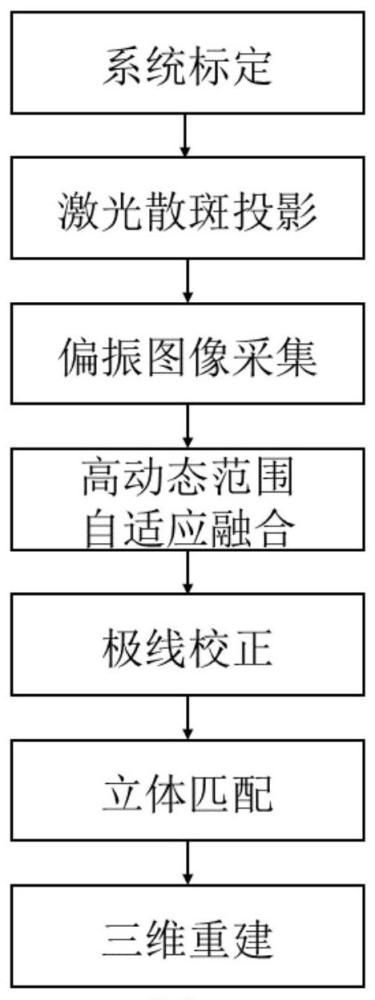
2、本发明的技术方案是:这种高反射率样品动态三维测量方法,其包括以下步骤:
3、(1)采用散斑投影模块结合成像模块组成双目视觉测量系统,由激光透射衍射元件产生散斑投影到被测物的表面,经过被测物表面调制后成像在偏振相机中;
4、(2)对偏振相机进行相机标定,获取相机内参和外参,打开可调激光器照射衍射光学元件产生散斑投影到被测物表面,利用双目偏振相机同步采集;
5、(3)相机拍摄到的高动态范围的图像存在曝光过度和曝光不足的两种区域,8bit相机成像的像素灰度值最大为255,当i=255,说明该点像素过曝,需要处理;
6、(4)若偏振增强后高反区域过曝,i=255,则采用偏振全光处理;
7、(5)如果仍然过曝,i=255,则采用偏振融合处理,选取该像素点在匹配窗口下最优偏振通道中的像素点匹配;
8、(6)对处理后的左融合图像和右策略融合图像进行极线校正;
9、(7)融合为一张高动态范围图像后,逐像素点在相同融合策略的右图中匹配;
10、(8)匹配后得到视差图,结合系统标定参数,根据双目相机和被测物的三角位置关系利用三角法结合标定得到的相机内外参数矩阵得到三维数据,进行三维重建。
11、本发明利用激光散斑投影结合双目偏振相机成像以合成高动态范围散斑图像的方法,对于暗区域进行偏振增强和偏振全光处理,而对于过亮区域和曝光区域采用窗口自适应偏振融合,对每个像素点的匹配窗口选择合适的偏振通道,实现匹配,因此只需单帧成像即可实现高动态范围三维测量与重建,为高动态范围的动态三维测量与重建奠定基础。
12、还提供了一种高反射率样品动态三维测量系统,其包括:投影模块和成像模块,对成像模块中的偏振相机进行标定后,投影模块由可调激光器照射衍射光学元件产生稳定的随机分布散斑,投影到被测物表面,再由成像模块中左偏振相机和右偏振相机同步采集,从不同的视角采集到经被测物调制的多偏振通道散斑图案,然后将左偏振图像输入高动态范围自适应融合得到融合图像和融合策略,右偏振图像按照融合策略与左偏振融合图像进行极线校正,矫正后图像逐像素点匹配得到视差图,通过三维重建方法得到重建结果。
技术特征:1.一种高反射率样品动态三维测量方法,其特征在于:其包括以下步骤:
2.根据权利要求1所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(1)中,散斑投影模块包括:可调激光器和衍射光学元件,成像模块包括第一偏振相机和第二偏振相机,偏振相机利用多偏振通道传感器单帧采集0°、45°、90°和135°的多偏振散斑图像。
3.根据权利要求2所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(2)中,偏振相机标定采用张正友棋盘格标定法获取相机的内部参数和外部参数,其中,偏振相机采集选为0°、
4.根据权利要求3所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(3)中,采集到的4幅偏振图像,进行多传感器的偏振增强处理,其原理为:
5.根据权利要求4所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(4)中,偏振全光处理原理为:
6.根据权利要求5所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(5)中,优化指标是散斑图像的窗口评价灰度梯度:
7.根据权利要求6所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(6)中,极线校正采用fusiello法。
8.根据权利要求7所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(7)中,采用zncc算法进行图像匹配,空间匹配相关系数为:
9.根据权利要求8所述的高反射率样品动态三维测量方法,其特征在于:所述步骤(8)中,匹配得到视差图结合相机标定得到的内部参数,利用三角法得到三维信息,具体采用的公式为:
10.根据权利要求1所述的高反射率样品动态三维测量方法的系统,其特征在于:其包括:投影模块和成像模块,对成像模块中的偏振相机进行标定后,投影模块由可调激光器照射衍射光学元件产生稳定的随机分布散斑,投影到被测物表面,再由成像模块中左偏振相机和右偏振相机同步采集,从不同的视角采集到经被测物调制的多偏振通道散斑图案,然后将左偏振图像输入高动态范围自适应融合得到融合图像和融合策略,右偏振图像按照融合策略与左偏振融合图像进行极线校正,矫正后图像逐像素点匹配得到视差图,通过三维重建方法得到重建结果。
技术总结高反射率样品动态三维测量方法及系统,只需单帧成像即可实现高动态范围三维测量与重建,为高动态范围的动态三维测量与重建奠定基础。方法包括:(1)采用散斑投影模块结合成像模块组成双目视觉测量系统,由激光透射衍射元件产生散斑投影到被测物的表面,经过被测物表面调制后成像在偏振相机中;(2)对偏振相机标定,利用双目偏振相机同步采集;(3)当I=255,说明该点像素过曝,需要处理;(4)若偏振增强后高反区域过曝,采用偏振全光处理;(5)如仍过曝,采用偏振融合处理;(6)对处理后的左融合图像和右策略融合图像进行极线校正;(7)融合为一张高动态范围图像后,逐像素点在相同融合策略的右图中匹配;(8)进行三维重建。技术研发人员:郝群,胡摇,徐喜受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/307715.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。