一种船舶自动系泊控制方法及系统与流程
- 国知局
- 2024-10-09 15:09:11
本发明属于港口船舶系泊领域,尤其涉及一种船舶自动系泊控制方法及系统。
背景技术:
1、目前,贸易和港口物流的不断发展,水路运输在物流行业中发挥着愈发重要的作用。船舶系泊效率及安全是制约码头作业效率的重要因素之一。
2、缆绳系泊仍是当前船舶系泊的主要方式。传统的缆绳系泊作业需要缆绳和多个作业人员相互配合,要有专人指挥作业,如果操作不当,容易出现断缆、脱缆等安全问题。
3、现有技术中,为了解决传统的缆绳系泊作业,有的采用了自动系泊技术。自动系泊技术通过位移传感器测量船舶的位置,控制箱计算后自动控制液压缸,从而控制机械臂和磁力吸盘对船舶进行减震和系泊,三向力传感器测量船舶所受的横、纵、垂向力的大小,控制液压缸调整机械臂的位置,以抑制船舶的运动幅度和速度,这样,改善了码头工人进行系泊作业的工作强度,提高了船舶系泊的效率。
4、目前,自动系泊系统主要存在磁力式自动系泊和真空式自动系泊两种方式,自动系泊是利用自身系统所产生的吸附力替代缆绳的拉力以限制船舶位移。靠泊船舶受潮流、风浪等水文气象条件频繁变化的影响,会导致靠泊船舶为维持系泊稳定而所需要的吸附力不断发生变化,若自动系泊系统不能及时调整对船舶的吸附力,会导致系统自身发生严重的安全事故。同时,靠泊船舶在失去自动系泊系统的吸附力后,在周围不利水文气象等因素作用下,会对码头设施及岸边作业设备、相邻靠泊船舶、船舶自身及周围作业人员产生严重安全威胁。
技术实现思路
1、本发明提供一种船舶自动系泊控制方法,方法能够依据实时的船舶载荷调整系泊力,可以节约能耗同时改善船舶的泊稳条件。
2、方法包括:
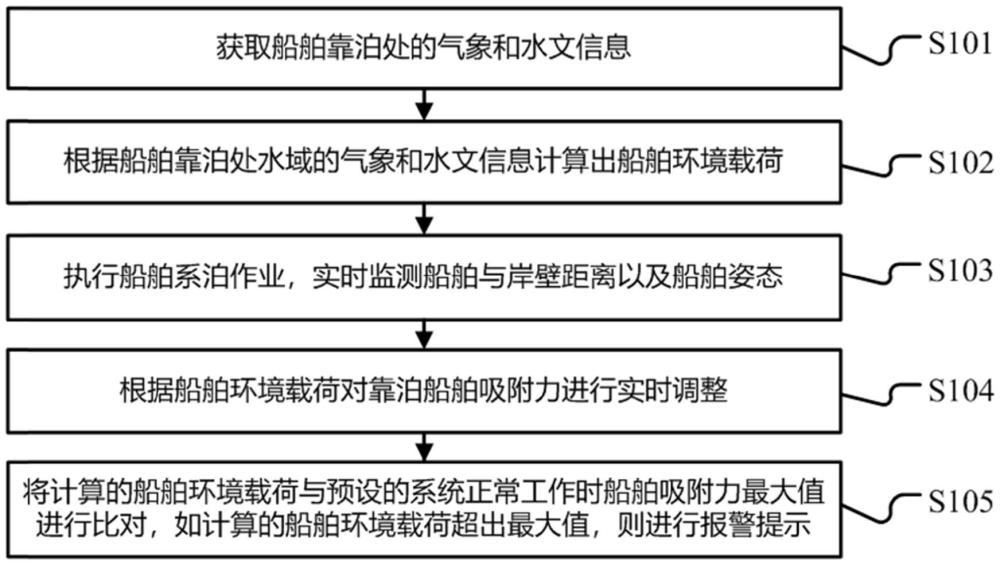
3、获取船舶靠泊处的气象和水文信息;
4、根据船舶靠泊处水域的气象和水文信息计算出船舶环境载荷;
5、执行船舶系泊作业,实时监测船舶与岸壁距离以及船舶姿态;
6、根据船舶环境载荷对靠泊船舶吸附力进行实时调整;
7、将计算的船舶环境载荷与预设的系统正常工作时船舶吸附力最大值进行比对,如计算的船舶环境载荷超出最大值,则进行报警提示。
8、进一步需要说明的是,方法中,还获取船体水面以上的横向受风面积axw(m2);
9、获取设计风速的横向分量vx(m/s);
10、获取风压不均匀折减系数ζ1;
11、获取风压高度变化修正系数ζ2;
12、其中,横向风载荷fxw(kn)的计算公式为
13、进一步需要说明的是,方法中,获取船体水面以上的纵向受风面积ay(m2);
14、获取设计风速的纵向分量vy(m/s);
15、纵向风载荷fyw(kn)的计算公式为
16、进一步需要说明的是,步骤根据船舶靠泊处水域的气象和水文信息计算出船舶环境载荷;还包括:获取水流流向角θ;
17、当水流与船舶纵轴平行或流向角θ<15°或>165°时,获取水流对船首横向分力系数cxsc;
18、获取相关水域水的密度ρ;
19、获取相关水域的水流速度v;
20、获取船舶吃水线以下的横向投影面积b';
21、水流对船首横向分力fxsc的计算公式为fxsc=1/2cxscρv2b'。
22、进一步需要说明的是,方法中,还获取水流对船尾横向分力系数cxnc;
23、水流对船尾横向分力fxmc的计算公式为fxmc=1/2cxmcρv2b'。
24、进一步需要说明的是,方法中,还获取水流力的纵向分力系数cyc;
25、船舶吃水线以下的表面积s;水流对船舶产生的水流力纵向分力fyc的计算公式为fyc=1/2cycρv2s;
26、当水流角θ为15°~165°时,获取水流力的横向分力系数cxc;
27、获取船舶平行水流方向的投影面积ayc;
28、水流对船舶作用产生的水流力的横向分力fxc的计算公式为fxc=1/2cxcρv2ayc。
29、进一步需要说明的是,获取水流力的纵向分力系数cyc;
30、获取船舶水下部分垂直的投影面积axc;
31、水流对船舶作用产生的水流力的纵向分力fyc(kn)的计算公式为fyc=1/2cycρv2axc。
32、进一步需要说明的是,所述根据风载荷和潮流载荷计算船舶环境载荷的方法为,当水流与船舶纵轴平行或流向角θ<15°或>165°时,根据横向风载荷fxw(kn)和水流对船首横向分力fxsc(kn)、水流对船尾横向分力fxmc(kn)计算船舶横向环境载荷fx(kn),船舶横向环境载荷fx(kn)的计算公式为fx=fxw+fxsc+fxmc。
33、进一步需要说明的是,根据纵向风载荷fyw(kn)和纵向潮流载荷fyc(kn)计算船舶纵向环境载荷fy(kn);
34、船舶纵向环境载荷fy(kn)的计算公式为fy=fyw+fyc;
35、当水流角θ为15°~165°时,根据横向风载荷fxw(kn)和水流对船舶作用产生的水流力的横向分力fxc(kn)计算船舶横向环境载荷fx(kn);船舶横向环境载荷fx(kn)的计算公式为fx=fxw+fxc;
36、根据纵向风载荷fyw(kn)和纵向潮流载荷fyc(kn)计算船舶纵向环境载荷fy(kn);船舶纵向环境载荷fy(kn)的计算公式为fy=fyw+fyc。
37、本发明还提供一种船舶自动系泊控制系统,系统包括:气象传感器、水文信息获取组件、现场声光报警器以及控制终端机;岸桥主梁上安装有视频摄像头,在岸桥海侧门腿安装有视觉传感器;
38、控制终端机通过与视频摄像头连接,监测船舶靠泊离泊信息以及船舶姿态;控制终端机通过与视觉传感器连接,实时测量船舶与码头岸壁之间的距离;
39、控制终端机通过与气象传感器和水文信息获取组件连接,获取船舶靠泊处的气象和水文信息;
40、控制终端机根据船舶靠泊处水域的气象和水文信息计算出船舶环境载荷;
41、根据船舶环境载荷对靠泊船舶吸附力进行实时调整;
42、将计算的船舶环境载荷与预设的系统正常工作时船舶吸附力最大值进行比对,如计算的船舶环境载荷超出最大值,则通过现场声光报警器进行报警提示。
43、从以上技术方案可以看出,本发明具有以下优点:
44、本发明提供的方法基于自动系泊控制方法及系统,降低了自系泊系统在运行过程的能耗并保证自系泊系统在运行过程的系泊安全。通过在岸桥主梁上安装有视频摄像头,全程监测船舶靠泊离泊信息、船舶姿态等,在岸桥海侧门腿安装视觉传感器,实时测量船舶与码头岸壁之间的距离,系泊力的大小调整及系统安全由plc控制。
45、本发明通过获取船舶靠泊处的气象和水文信息,计算船舶靠泊处水域的船舶载荷,并将实时的船舶载荷信息反馈给控制终端机。船舶载荷大小设定阈值,与系泊力大小对应,节约系统能耗,改善船舶泊稳条件。当自动系泊系统提供的系泊力不能满足极端船舶环境载荷或系泊系统本身发生故障时,能够发出实时预警,保障系统的安全性。
46、本发明能够依据实时的船舶载荷调整系泊力,可以节约能耗同时改善船舶的泊稳条件。具有安全预警功能,确保系统在极端环境或系统故障时的系泊安全。还可以在保证安全的同时提高靠泊及离泊效率。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。