一种基于转子动能的风电机组控制方法
- 国知局
- 2024-10-15 10:02:44
本发明涉及风力发电,具体为一种基于转子动能的风电机组控制方法。
背景技术:
1、风力发电机组是将风的动能转换为电能的系统。要保证风电的频率恒定,一种方式就是保证发电机的恒定转速,即恒速恒频的运行方式,因为发电机由风力机经过传动装置进行驱动运转,所以这种方式无疑要恒定风力机的转速,这种方式会影响到风能的转换效率;另一种方式就是发电机转速随风速变化,通过其他的手段保证输出电能的频率恒定,即变速恒频运行。
2、现有技术中,风电机组的频率控制主要集中在转子动能与备用功率控制两方面,目前对于转子动能的控制方式,容易造成风电场转子动能的浪费,使得风电机组的惯性响应和以此调频能力难以得到有效利用,而对于备用功率的控制方法,通常未考虑风电场内风电机组的控制特性,不能合理、充分地利用风电机组的备用功率。
技术实现思路
1、本发明的目的在于提供一种基于转子动能的风电机组控制方法,以解决上述背景技术提出的风电机组的频率控制主要集中在转子动能与备用功率控制两方面,目前对于转子动能的控制方式,容易造成风电场转子动能的浪费,使得风电机组的惯性响应和以此调频能力难以得到有效利用,而对于备用功率的控制方法,通常未考虑风电场内风电机组的控制特性,不能合理、充分地利用风电机组的备用功率的问题。
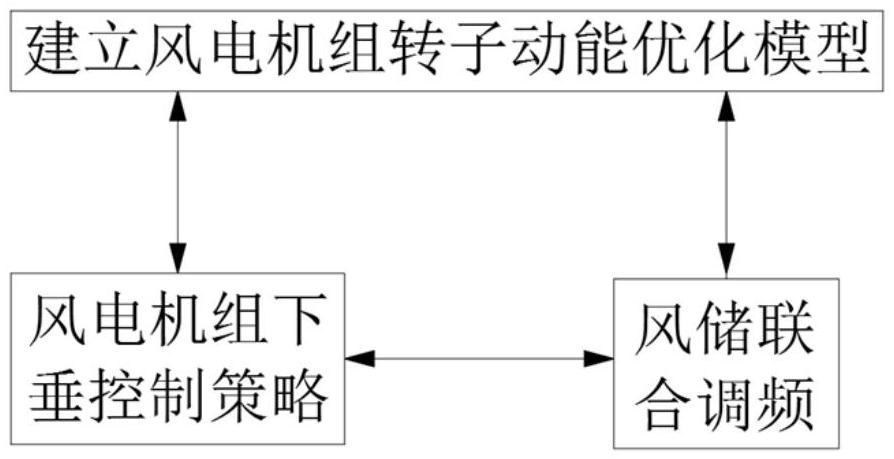
2、为实现上述目的,本发明提供如下技术方案:一种基于转子动能的风电机组控制方法,包括以下方法:建立风电机组转子动能优化模型:包括风力机模型与转子动能优化模型,配合风电机组下垂控制策略以及风储联合调频,风电机组下垂控制策略包括下垂系数设计、调整风机有功出力和计及rocof与转子动能的下垂控制策略。
3、优选的,风力机数学模型为:
4、
5、
6、
7、式中,pm为风力机的输出机械功率,ρ为空气密度,a为风电机组的叶尖速比,系数c1=0.517,c2=116,c3=0.4,c4=5,c5=21,c6=0.006;
8、风电机组的控制系统主要包括风力机转速控制和桨距角控制,其中,背靠背全功率变流器分为机侧变流器和网侧变流器,机侧变流器的控制目标是风力发电机的输出功率,网侧变流器的控制目标是变流器的直流侧电压和风力发电机的无功功率,变流器控制系统均采用pi控制。
9、优选的,所述转子动能优化模型的目标函数为:
10、
11、
12、式中,δek,i为第i台风电机组的转子动能,n为风电机组的数量,ωdel,i为第i台风机降载运行时的转速,ωopt,i为第i台风机最优转子转速。
13、优选的,风电场总的降载功率等于各台风电机组降载功率之和,且各台风电机组的转子转速、桨距角、转子动能和降载功率均在规定范围内,其约束条件为:
14、
15、ωopt,i≤ωdel,i≤ωmax,i;
16、βmin≤βi≤βmax;
17、δek,min≤δek,i≤δek,max;
18、δpd,min≤δpd,i≤δpd,max;
19、式中,δpd为风电场总的降载功率,δpd,i为第i台风电机组的降载功率,pmppt,i为第i台风电机组的最大运行有功功率,βmin和βmax分别为风机桨距角的最小值和最大值,δek,min和δek,max分别为风电机组转子动能的最小值和最大值,δpd,min和δpd,max分别为风电机组降载功率的最小值和最大值。
20、优选的,所述下垂系数设计方法为:系统发生扰动后的频率动态分为区间1、区间2和区间3,针对不同的频率动态区间,采用不同的下垂系数;
21、区间1:采用较大的下垂系数,充分利用转子动能在短时间内为系统提供功率支撑,阻止频率快速跌落;
22、区间2:下垂系数随rocof减小而减小,在提高频率最低点的同时,防止风机过度释放转子动能;
23、区间3:频率开始恢复,此时将下垂系数设置较小,保留转子动能,以应对后续突发状况;
24、为避免风机有功出力突变给系统频率带来的二次冲击,同时减少风机内部零件的疲劳磨损,采用butterworth函数来满足下垂系数的平滑变化。
25、优选的,所建立的下垂系数与rocof的耦合关系为:
26、
27、式中,kmax、kmin粪便为下垂系数k的上限值与下限值,均为常数。
28、优选的,所述计及rocof与转子动能的下垂控制策略为:在频率测试环境采用低通滤波器,以消除测量信号中的高频噪声,在稳定条件下,风机运行在mppt模式,当系统发生频率偏移时,则根据rocof和转子转速调整下垂系数,一旦频率偏差越过设定区域,下垂控制根据频率偏差δf和自适应下垂系数kp(df/dt,ωr)给出调频功率增加,释放转子动能来支撑系统频率;
29、下垂控制回路的有功出力增量δpdroop的表达式为;
30、δpdroop=kp(df/dt,ωr)δf。
31、优选的,所述调整风机有功出力的方法为:在自适应下垂控制中引入转速影响因子,限制低转速风机的有功出力,当风机转速为ωr时,转子中可释放的动能为:
32、
33、式中,j为风机的等效转动惯量;
34、定子转速影响因子η为:
35、
36、其中,η∈[0,1],η随转速ωr减小而减小。
37、优选的,所述风储联合调频方法为:超级电容器通过双向dc-dc变换器接入转子侧与网侧变换器之间的直流母线,在系统负荷突增导致功率不平衡期间,分别控制转子侧变流器和双向变流器,实现双馈风机的转子动能和电容器储能通过网侧变流器有效输出,共同参与系统频率调节。
38、与现有技术相比,本发明的有益效果是:
39、本发明中,通过建立风电机组转子动能优化模型,配合对下垂系数的调整,在相同减载水平下具有更多的可释放转子动能,从而具有更多的备用功率来响应系统频率变化,同时该方式能够更加充分的利用风电场的转子动能,从而具有更好的一次调频控制性能,同时配合风电机组下垂控制策略,提高了下垂控制相应速度和系统频率最低点,充分发挥了转子动能对系统频率的支撑作用,同时能够防止风机转子失速,避免系统频率二次跌落,配合风储联合调频,能够在风电机组在频率波动时提供快速且长时的有功支撑,保证了输出有功功率的最大化。
技术特征:1.一种基于转子动能的风电机组控制方法,其特征在于,包括以下方法:建立风电机组转子动能优化模型:包括风力机模型与转子动能优化模型,配合风电机组下垂控制策略以及风储联合调频,风电机组下垂控制策略包括下垂系数设计、调整风机有功出力和计及rocof与转子动能的下垂控制策略。
2.根据权利要求1所述的基于转子动能的风电机组控制方法,其特征在于:风力机数学模型为:
3.根据权利要求1所述的基于转子动能的风电机组控制方法,其特征在于:所述转子动能优化模型的目标函数为:
4.根据权利要求2所述的基于转子动能的风电机组控制方法,其特征在于:风电场总的降载功率等于各台风电机组降载功率之和,且各台风电机组的转子转速、桨距角、转子动能和降载功率均在规定范围内,其约束条件为:
5.根据权利要求4所述的基于转子动能的风电机组控制方法,其特征在于:所述下垂系数设计方法为:系统发生扰动后的频率动态分为区间1、区间2和区间3,针对不同的频率动态区间,采用不同的下垂系数;
6.根据权利要求1所述的基于转子动能的风电机组控制方法,其特征在于:所建立的下垂系数与rocof的耦合关系为:
7.根据权利要求1所述的基于转子动能的风电机组控制方法,其特征在于:所述计及rocof与转子动能的下垂控制策略为:在频率测试环境采用低通滤波器,以消除测量信号中的高频噪声,在稳定条件下,风机运行在mppt模式,当系统发生频率偏移时,则根据rocof和转子转速调整下垂系数,一旦频率偏差越过设定区域,下垂控制根据频率偏差δf和自适应下垂系数kp(df/dt,ωr)给出调频功率增加,释放转子动能来支撑系统频率;
8.根据权利要求3所述的基于转子动能的风电机组控制方法,其特征在于:所述调整风机有功出力的方法为:在自适应下垂控制中引入转速影响因子,限制低转速风机的有功出力,当风机转速为ωr时,转子中可释放的动能为:
9.根据权利要求8所述的基于转子动能的风电机组控制方法,其特征在于:所述风储联合调频方法为:超级电容器通过双向dc-dc变换器接入转子侧与网侧变换器之间的直流母线,在系统负荷突增导致功率不平衡期间,分别控制转子侧变流器和双向变流器,实现双馈风机的转子动能和电容器储能通过网侧变流器有效输出,共同参与系统频率调节。
技术总结本发明公开了一种基于转子动能的风电机组控制方法,包括以下方法:建立风电机组转子动能优化模型:包括风力机模型与转子动能优化模型,配合风电机组下垂控制策略以及风储联合调频。本发明通过建立风电机组转子动能优化模型,配合对下垂系数的调整,在相同减载水平下具有更多的可释放转子动能,从而具有更多的备用功率来响应系统频率变化,同时该方式能够更加充分的利用风电场的转子动能,从而具有更好的一次调频控制性能,同时配合风电机组下垂控制策略,提高了下垂控制相应速度和系统频率最低点,充分发挥了转子动能对系统频率的支撑作用,同时能够防止风机转子失速,避免系统频率二次跌落。技术研发人员:贾云冲,韩长华,董新伟,徐智军,张鑫陈,李秋硕受保护的技术使用者:中国矿业大学技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316235.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表