一种多目相机标定方法及标定装置与流程
- 国知局
- 2024-10-21 14:27:03
本发明涉及相机标定,尤其涉及一种多目相机标定方法及标定装置。
背景技术:
1、液体火箭发动机的力学试验过程中特别关注各种载荷下发动机的振动和结构变形,常在该过程中布置多个各种类型的传感器,但该方法耗时费力,且空间分辨率低。随着技术的发展,新兴的基于机器视觉的测量技术以其非接触、远距离和高分辨率等优势逐渐出现在发动机力学试验种中。现有的双目视觉测量方法能测得的发动机信息有限,发展多目相机的视觉测量技术势在必行。
2、现在主流的多目相机标定方法主要包括利用标定物的相机标定(如基于棋盘格的张正友标定法、基于正六面体标定物的标定方法)和基于扫描仪定位特征的相机标定。利用标定物相机标定方法需要将标定物放置在两个相机的视场重叠区域,但在实际的视觉测量中,两个相机的重叠视场往往放置了待测物,无法将标定物放置在两相机的重叠视场区域,致使相机标定困难。而基于扫描仪定位特征的标定方法需要额外的扫描装置,增加了相机标定的成本,同时标定过程操作复杂,所需技术要求高。
3、因此,亟需一种多目相机标定方法及标定装置。
技术实现思路
1、本发明的目的在于提供一种多目相机标定方法及标定装置,用于解决多目相机的重叠视场被待测物占据情况下多目相机标定困难、成本高且操作复杂的问题。
2、为了实现上述目的,本发明提供如下技术方案:
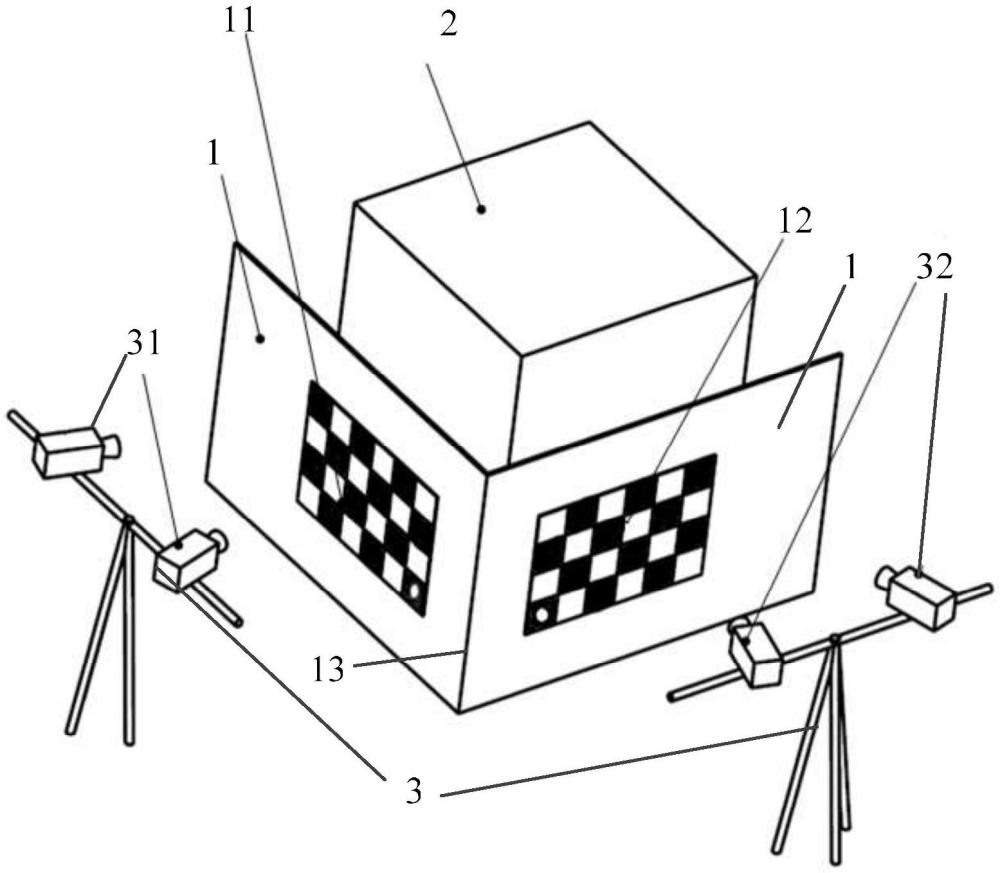
3、第一方面,本发明提供一种多目相机标定方法,应用于多目相机标定装置,所述多目相机标定装置包括两个互相连接且不在同一平面上的标定基板,所述标定基板设置在待测物和多目相机之间,每个所述标定基板朝向多目相机的一面固定有一个棋盘格标定板,所述棋盘格标定板与所述标定基板共面,两个所述标定基板之间存在约束关系,所述约束关系为固定在所述标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠;所述棋盘格标定板任意一角处的棋盘格内设有圆形图案,与所述圆形图案距离最近的内角点为标定物坐标系的原点;所述多目相机包括第一相机和第二相机,所述第一相机的拍摄范围和第二相机的拍摄范围之间有重叠区域,所述待测物位于所述重叠区域内;所述棋盘格标定板任意一角处的棋盘格内设有圆形图案,与所述圆形图案距离最近的内角点为标定物坐标系的原点;每个棋盘格标定板对应一个标定物坐标系;所述多目相机包括第一相机和第二相机,所述第一相机的拍摄范围和第二相机的拍摄范围之间有重叠区域,所述待测物位于所述重叠区域内;方法包括:
4、分别控制所述第一相机和第二相机对多目相机标定装置进行拍摄,得到第一相机拍摄的多张第一图像和第二相机拍摄的多张第二图像;
5、根据标定物坐标系的原点、第一图像、第二图像以及所述约束关系对所述多目相机进行标定。
6、与现有技术相比,本发明提供的一种多目相机标定方法,应用于多目相机标定装置,多目相机标定装置包括两个互相连接且不在同一平面上的标定基板,每个标定基板朝向多目相机的一面设置有一个棋盘格标定板,棋盘格标定板与标定基板共面,可以保证多目相机的第一相机和第二相机在同一时间分别看到标定装置的一个标定平面上的棋盘格标定板;两个标定基板之间存在约束关系,约束关系为固定在标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠,根据该约束关系以及两个相机拍摄的图像就可以实现对多目相机的标定,另外,棋盘格标定板任意一角处的棋盘格内设有圆形图案,将与圆形图案距离最近的内角点作为标定物坐标系的原点,可以确定唯一的棋盘格标定板的标定物坐标系原点,避免棋盘格标定板的标定物坐标系原点不统一导致标定过程存在歧义,通过控制第一相机和第二相机对多目相机标定装置进行拍摄,得到多张第一相机拍摄的图像和多张第二相机拍摄的图像;然后根据标定物坐标系的原点、第一相机拍摄的图像、第二相机拍摄的图像以及约束关系对多目相机进行标定可以实现对多目相机重叠视场被待测物占据时的多目相机的标定,成本低且标定方法简单。
7、第二方面,本发明提供一种多目相机标定装置,应用于所述多目相机标定方法,所述多目相机标定装置包括两个互相连接且不在同一平面上的标定基板,所述标定基板设置在待测物和多目相机之间,每个所述标定基板朝向多目相机的一面固定有一个棋盘格标定板,所述棋盘格标定板与所述标定基板共面,两个所述标定基板之间存在约束关系,所述约束关系为固定在所述标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠;所述棋盘格标定板任意一角处的棋盘格内设有圆形图案,与所述圆形图案距离最近的内角点为标定物坐标系的原点;所述多目相机包括第一相机和第二相机,所述第一相机的拍摄范围和第二相机的拍摄范围之间有重叠区域,所述待测物位于所述重叠区域内;所述第一相机和第二相机用于对多目相机标定装置进行拍摄;根据标定物坐标系的原点、第一相机拍摄的第一图像、第二相机拍摄的第二图像以及所述约束关系对所述多目相机进行标定。
8、与现有技术相比,本发明提供的多目相机标定装置的有益效果与上述技术方案所述多目相机标定方法的有益效果相同,此处不做赘述。
技术特征:1.一种多目相机标定方法,其特征在于,应用于多目相机标定装置,所述多目相机标定装置包括两个互相连接且不在同一平面上的标定基板,所述标定基板设置在待测物和多目相机之间,每个所述标定基板朝向多目相机的一面固定有一个棋盘格标定板,所述棋盘格标定板与所述标定基板共面,两个所述标定基板之间存在约束关系,所述约束关系为固定在所述标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠;所述棋盘格标定板任意一角处的棋盘格内设有圆形图案,与所述圆形图案距离最近的内角点为标定物坐标系的原点;所述多目相机包括第一相机和第二相机,所述第一相机的拍摄范围和第二相机的拍摄范围之间有重叠区域,所述待测物位于所述重叠区域内;方法包括:
2.根据权利要求1所述多目相机标定方法,其特征在于,所述根据标定物坐标系的原点、第一图像、第二图像以及所述约束关系对所述多目相机进行标定包括:
3.根据权利要求2所述多目相机标定方法,其特征在于,所述对所述图像中的角点进行提取,并确定各角点的像素坐标和对应标定物坐标系下的标定物坐标包括:
4.根据权利要求2所述多目相机标定方法,其特征在于,相机的目标参数包括相机的内参矩阵、标定物坐标系相对相机坐标系的旋转矩阵以及标定物坐标系相对相机坐标系的平移矢量;所述基于各角点的像素坐标和对应的标定物坐标,采用张正友标定法对相机进行标定,得到相机的目标参数包括:
5.根据权利要求2所述多目相机标定方法,其特征在于,所述确定第一相机的目标参数和第二相机的目标参数之后还包括:
6.根据权利要求2所述多目相机标定方法,其特征在于,两个所述棋盘格标定板为第一棋盘格标定板和第二棋盘格标定板;第一棋盘格标定板的标定物坐标系为第一标定物坐标系,第二棋盘格标定板的标定物坐标系为第二标定物坐标系,所述第一棋盘格标定板为朝向所述第一相机的棋盘格标定板,所述第二棋盘格标定板为朝向所述第二相机的棋盘格标定板;所述根据所述第一相机的目标参数、第二相机的目标参数以及所述约束关系确定第一相机坐标系和第二相机坐标系之间的相对旋转矩阵和相对平移矢量包括:
7.根据权利要求6所述多目相机标定方法,其特征在于,所述分别控制所述第一相机和第二相机对多目相机标定装置进行拍摄,得到第一相机拍摄的多张第一图像和第二相机拍摄的多张第二图像包括:
8.一种多目相机标定装置,其特征在于,应用于权利要求1-7任意一项所述多目相机标定方法,多目相机标定装置包括两个互相连接且不在同一平面上的标定基板,所述标定基板设置在待测物和多目相机之间,每个所述标定基板朝向多目相机的一面固定有一个棋盘格标定板,所述棋盘格标定板与所述标定基板共面,两个所述标定基板之间存在约束关系,所述约束关系为固定在所述标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠;所述棋盘格标定板任意一角处的棋盘格内设有圆形图案,与所述圆形图案距离最近的内角点为标定物坐标系的原点;所述多目相机包括第一相机和第二相机,所述第一相机的拍摄范围和第二相机的拍摄范围之间有重叠区域,所述待测物位于所述重叠区域内;所述第一相机和第二相机用于对多目相机标定装置进行拍摄;根据标定物坐标系的原点、第一相机拍摄的第一图像、第二相机拍摄的第二图像以及所述约束关系对所述多目相机进行标定。
9.根据权利要求8所述多目相机标定装置,其特征在于,所述棋盘格标定板为长方形;所述棋盘格标定板的长边为所述标定物坐标系的xp轴,所述棋盘格标定板的短边为所述标定物坐标系的yp轴,所述标定物坐标系的zp轴符合坐标系右手法则,相机坐标系以相机的光心为坐标原点,相机坐标系的xc轴、成像平面坐标系的x轴方向以及像素坐标系的u轴方向相同,相机坐标系的yc轴、成像平面坐标系的y轴方向以及像素坐标系的v轴方向相同,相机坐标系的zc轴为相机主光轴。
10.根据权利要求8所述多目相机标定装置,其特征在于,所述第一相机包括多个相机,所述第二相机包括多个相机。
技术总结本发明公开一种多目相机标定方法及标定装置,涉及相机标定技术领域,以解决多目相机重叠视场被待测物占据情况下多目相机标定困难的问题。方法应用于多目相机标定装置,装置包括两个互相连接且不在同一平面上的标定基板,两个标定基板之间的约束关系为固定在标定基板上的棋盘格标定板绕两个标定基板的连接轴旋转并平移后与另一个棋盘格标定板的图案完全重叠;棋盘格标定板任意一角处的棋盘格内设有圆形图案,与圆形图案距离最近的内角点为标定物坐标系的原点;基于多目相机对多目相机标定装置拍摄的图像对多目相机进行标定。本发明提供的多目相机标定方法用于多目相机的重叠视场被待测物占据情况下的多目相机标定。技术研发人员:舒小华,王珺,闫松,张志伟,李祎,吴琼,何志勇受保护的技术使用者:西安航天动力研究所技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318204.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表