计算机视觉的港口场景行人轨迹获取方法和装置与流程
- 国知局
- 2024-11-06 14:39:34
本申请涉及图像处理领域,特别是涉及计算机视觉的港口场景行人轨迹获取方法、装置、电子装置和存储介质。
背景技术:
1、随着运输量的逐年增加,港区的安全管理问题日益突出。港区内部往往人员密集,车辆密集,货物密集,可能会出现部分人员车辆没有遵守安全规范,例如禁止区域有人员、车辆的闯入,从而导致人员和车辆靠的太近,甚至引发人员车辆相撞的安全事故。因此,高效的安全管理措施,防范人车相撞显得非常重要。利用安保人员进行现场巡查或是观看摄像监控,是一种排查安全隐患的管理方式,然而这种人工检测方法效率不高。近年来,基于计算机视觉的视频分析技术发展较为迅速,广泛用于包括安防在内的各个领域,具有效率高,实时性好的优势,能24小时不间断的对装有监控的多个区域同时监控分析,判断存在画面中人车相撞的可能性。
2、传统的防范人车相撞的系统,需要在每辆车辆上安装雷达或双目摄像头,通过雷达3d建模或双目测距技术实现,这些方式需要在每一辆车辆上都要进行安装雷达或双目摄像头以及相应的计算机设备,成本巨大,而且随着车辆的移动获取的图像会存在视图上的距离偏差,即近大远小,以使得获取的结果精确度不高,进而导致物体的跟踪轨迹计算误差大的问题。
3、目前针对相关技术中物体的跟踪轨迹计算误差大的问题,尚未提出有效的解决方案。
技术实现思路
1、本申请实施例提供了一种计算机视觉的港口场景行人轨迹获取方法、装置、电子装置和存储介质,以至少解决相关技术中物体的跟踪轨迹计算误差大的问题。
2、第一方面,本申请实施例提供了一种基于计算机视觉的港口场景行人轨迹获取方法,包括:
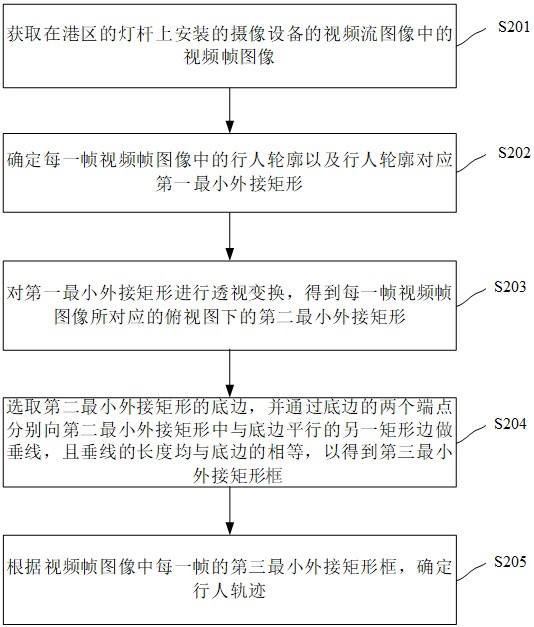
3、获取在港区的灯杆上安装的摄像设备的视频流图像中的视频帧图像;
4、确定每一帧所述视频帧图像中的行人轮廓以及所述行人轮廓对应第一最小外接矩形;
5、对所述第一最小外接矩形进行透视变换,得到每一帧所述视频帧图像所对应的俯视图下的第二最小外接矩形;
6、选取所述第二最小外接矩形的底边,并通过所述底边的两个端点分别向所述第二最小外接矩形中与所述底边平行的另一矩形边做垂线,且所述垂线的长度均与所述底边的相等,以得到第三最小外接矩形框;
7、根据所述视频帧图像中每一帧的所述第三最小外接矩形框,确定所述行人轨迹。
8、第二方面,本申请实施例提供了一种计算机视觉的港口场景行人轨迹获取装置,包括:
9、获取模块,用于获取在港区的灯杆上安装的摄像设备的视频流图像中的视频帧图像;
10、第一确定模块,用于确定每一帧所述视频帧图像中的行人轮廓以及所述行人轮廓对应第一最小外接矩形;
11、变换模块,用于对所述第一最小外接矩形进行透视变换,得到每一帧所述视频帧图像所对应的俯视图下的第二最小外接矩形;
12、处理模块,用于选取所述第二最小外接矩形的底边,并通过所述底边的两个端点分别向所述第二最小外接矩形中与所述底边平行的另一矩形边做垂线,且所述垂线的长度均与所述底边的相等,以得到第三最小外接矩形框;
13、第二确定模块,用于根据所述视频帧图像中每一帧的所述第三最小外接矩形框,确定所述行人轨迹。
14、第三方面,本申请实施例提供了一种电子装置,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的计算机视觉的港口场景行人轨迹获取方法。
15、第四方面,本申请实施例提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一方面所述的计算机视觉的港口场景行人轨迹获取方法。
16、相比于相关技术,本申请实施例提供的计算机视觉的港口场景行人轨迹获取方法、装置、电子装置和存储介质,通过获取在港区的灯杆上安装的摄像设备的视频流图像中的视频帧图像;确定每一帧视频帧图像中的行人轮廓以及行人轮廓对应第一最小外接矩形;对第一最小外接矩形进行透视变换,得到每一帧视频帧图像所对应的俯视图下的第二最小外接矩形;选取第二最小外接矩形的底边,并通过底边的两个端点分别向第二最小外接矩形中与底边平行的另一矩形边做垂线,且垂线的长度均与底边的相等,以得到第三最小外接矩形框;根据视频帧图像中每一帧的第三最小外接矩形框,确定行人轨迹的方式,解决了相关技术中物体的跟踪轨迹计算误差大的问题,提高了物体的跟踪轨迹计算精确度。
17、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:1.一种基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,包括:
2.根据权利要求1所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,确定每一帧所述视频帧图像中的行人轮廓以及所述行人轮廓对应第一最小外接矩形包括:
3.根据权利要求2所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,采用深度学习算法对所述视频帧图像进行分割,得到所述视频帧图像中的行人轮廓包括:
4.根据权利要求1所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,根据所述视频帧图像中每一帧的所述第三最小外接矩形框,确定所述行人轨迹包括:
5.根据权利要求1所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,根据所述视频帧图像中每一帧的所述第三最小外接矩形框,确定所述行人轨迹之后,所述方法还包括:
6.根据权利要求5所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,所述预设直线拟合包括以下至少之一:一次直线拟合、二次直线拟合。
7.根据权利要求5所述的基于计算机视觉的港口场景行人轨迹获取方法,其特征在于,对所述行人轨迹进行预设直线拟合,确定所述行人轨迹所对应的预测轨迹之前,所述方法还包括:
8.一种计算机视觉的港口场景行人轨迹获取装置,其特征在于,包括:
9.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至7中任一项所述的计算机视觉的港口场景行人轨迹获取方法。
10.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行权利要求1至7中任一项所述的计算机视觉的港口场景行人轨迹获取方法。
技术总结本发明公开了一种计算机视觉的港口场景行人轨迹获取方法和装置,涉及图像处理领域;该方法包括:通过获取在港区的灯杆上安装的摄像设备的视频流图像中的视频帧图像;确定每一帧视频帧图像中的行人轮廓以及行人轮廓对应第一最小外接矩形;对第一最小外接矩形进行透视变换,得到每一帧视频帧图像所对应的俯视图下的第二最小外接矩形;选取第二最小外接矩形的底边,并通过底边的两个端点分别向第二最小外接矩形中与底边平行的另一矩形边做垂线,且垂线的长度均与底边的相等,以得到第三最小外接矩形框;根据视频帧图像中每一帧的第三最小外接矩形框,确定行人轨迹;解决了物体跟踪轨迹计算误差大的问题,提高了物体的跟踪轨迹计算精确度。技术研发人员:黄昂涛,夏侃,乔耿嘉,梅浪奇,鲍朝前,吴高德,叶倩莹,杨子江受保护的技术使用者:宁波港信息通信有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323373.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。