一种基于U-Net的湖泊围网养殖区自动提取方法
- 国知局
- 2024-11-06 14:44:20
本发明涉及遥感影像处理和水产养殖监测,尤其是一种基于u-net的湖泊围网养殖区自动提取方法。
背景技术:
1、随着经济的不断发展,人们对湖泊的开发利用强度也逐渐提高,利用湖泊进行围网养殖情况非常普遍。围网养殖带动了湖泊周边地区的经济发展,提高了人民的生活水平。但同时,超高密度的围网养殖也带来了一系列负面影响,也带来了一系列负面影响:一方面,养殖区围网的物理阻隔效应以及养殖污染的叠加效应使得湖区水质严重恶化、水体富营养化,同时使得局部区域的水生生态系统遭受严重的破坏;另一方面,养殖的鱼蟹消耗破坏了水生植物,降低湖泊的自净能力,打破了湖泊的生态平衡。为了湖泊生态环境保护和湖泊流域可持续发展,政府开始对湖泊网围养殖的整治和拆除,开启了真正的生态渔业模式的转型和实践。因此,掌握湖泊围网时空分布和演变对湖泊生态系统稳态追踪以及生态服务功能评估至关重要。
2、卫星遥感具有实时数据获取、广泛覆盖范围和历史数据的可追溯性等优点,是开展湖泊围网养殖时空监测有效手段。光学遥感凭借时间尺度长、光谱信息丰富、数据源丰富等优势,在湖泊围网监测中得到了广泛的应用。但由于光学遥感对天气条件的敏感性,其大规模应用受到限制。与光学遥感相比,合成孔径雷达(sar)不受天气条件影响,能够全天连续获取数据,围网与光滑水面有着二面体后向散射效应,sar更有利于湖泊围网监测。然而,现有的湖泊围网研究往往局限与单个湖泊或者大型湖泊,缺少不同类型的围网养殖湖泊的研究,需要更加精细化、自动化及泛用性的湖泊围网提取方法去探究大尺度上的湖泊围网养殖区的空间分布特征与时空演变规律。
技术实现思路
1、为解决现有湖泊围网提取技术存在的提取精度低、缺乏泛用性以及仍需要人工参与等问题,本发明的目的在于提供一种精度高、复杂度低,能够及时、快速、准确地实现湖泊围网养殖区的自动提取的基于u-net的湖泊围网养殖区自动提取方法。
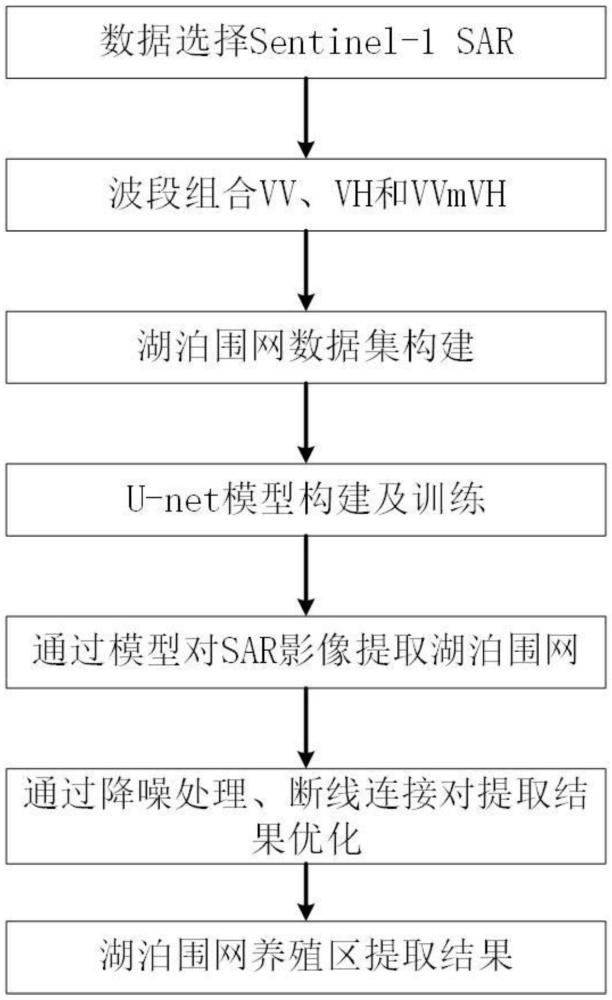
2、为实现上述目的,本发明采用了以下技术方案:一种基于u-net的湖泊围网养殖区自动提取方法,该方法包括下列顺序的步骤:
3、(1)选择高精度的遥感数据源并进行预处理:获取研究湖泊的长时序sentinel-1sar影像,对影像进行预处理,得到预处理后的sar影像;所述预处理包括辐射校正和去噪处理;
4、(2)选择组合后的sar影像:在预处理后的sar影像波段中选择vv波段和vh波段,将vv波段和vh波段相乘得到vvmvh特征,并将vv波段、vh波段和vvmvh特征进行组合,得到组合后的sar影像;
5、(3)构建湖泊围网数据集:标注围网制作像素级二值标签图,将组合后的sar影像及标注的二值标签图进行裁剪,然后对标签与影像进行数据增强,最终得到湖泊围网sar图像和二值标签图构成的湖泊围网数据集;
6、(4)构建湖泊围网提取模型及训练:采用u-net模型构建湖泊围网提取模型,将湖泊围网数据集按照4:1的比例划分为用于进行模型训练的训练集,以及用于进行精度验证的验证集,将训练集输入湖泊围网提取模型进行训练;
7、(5)通过训练后的湖泊围网提取模型对待提取的湖泊sar影像进行提取,得到湖泊围网初步提取结果,初步提取结果为包含湖泊围网信息的二值化图像;
8、(6)将初步提取结果进行优化:通过降噪处理和断线连接的方法对初步提取结果进行处理,得到湖泊围网最终提取结果。
9、所述步骤(2)具体包括以下步骤:
10、(2a)采用时序中值合成对长时序的sentinel-1sar影像的vv波段和vh波段进行湖泊围网特征增强,时序中值合成的计算公式如下:
11、medianσx,y=median{σ(x,y),1,σ(x,y),2,σ(x,y),3…σ(x,y),n}
12、其中,σ(x,y),n是(x,y)位置处第n个场景的像素后向散射系数;medianσx,y为时序中值合成结果;
13、(2b)选择vvmvh指数来增强围网信息,vvmvh指数的公式如下:
14、vvmvh=vvmedian×vhmedian
15、其中,vvmedian、vhmedian分别表示vv、vh的时间序列中位数组成。
16、所述步骤(4)具体包括以下步骤:
17、(4a)将训练集输入u-net模型进行训练,初始的学习率设置为1×10-4,每次训练输入4张影像块,最大的迭代次数为100次,在训练过程中使用adam优化算法进行训练,在每次迭代训练中动态调整学习率,adam优化算法的公式如下:
18、
19、其中,t为时间步;θt是在时间步t更新的参数,α是学习率;和均为参数,分别取0.9和0.999;∈取10-8;mt是梯度的一阶矩估计;vt是梯度的二阶矩估计;
20、(4b)u-net模型训练的损失函数选择交叉熵损失函数:
21、
22、其中,表示预测类别成员的概率,y表示像素标签的真实值,n表示图像块的批次大小,i表示索引。
23、所述步骤(6)具体包括以下步骤:
24、(6a)选择滑动窗口检测方法对初步提取结果进行降噪处理,得到围网提取结果:首先利用滑动窗口检测方法检测噪点,设定待判定窗口大小为10×10,滑动步长设定为1;若待判定窗口内有围网像素且窗口上无像素连续,则判定待判定窗口内为孤立的断线或者噪点,最后对筛选出的孤立的断线和噪点进行去除;
25、待判定窗口为:
26、w(i,j)=i[i:i+9,j:j+9]
27、其中,w(i,j)为以位置(i,i)为左上点的待判定窗口;i表示图像矩阵,i[i:i+9,j:j+9]表示从位置(i,i)开始的10×10子矩阵;
28、计算待判定窗口内的围网像素:
29、s(w(i,j))={(x,y)∣w(i,j)[x,y]=1}
30、其中,s(w(i,j))是窗口内像素和,w(i,j)[x,y]表示窗口w(i,j)中相对位置(x,y)处的像素值,假设1表示围网像素,0表示背景像素;
31、判断待判定窗口内有无连续像素:
32、c(w(i,j))=0或1
33、其中,c(w(i,j))表示对连续像素的判定,如果窗口内所有的围网像素都不相邻则c(w(i,j))为0,反之则为1;
34、对满足条件s(w(i,j))不为0且c(w(i,j))为0,利用下式对窗口内的噪点进行去除:
35、
36、其中,表示窗口内所有位置的像素值;i[i:i+x,j:j+y]表示从位置(i,i)开始的子矩阵;
37、(6b)对围网提取结果进行断线连接处理:首先对围网提取结果即围网线条进行细化处理,对于线条上的任意一点,如果满足其8领域按顺时针或逆时针方向像素值变化次数为2次,则该点为端点;检测出围网线条的端点之后,通过设定阈值,当任意两端点之间的距离小于等于设定阈值时,用直线连接这两个端点,检测围网线条上的任意一点p是否为端点的公式如下:
38、
39、其中,p为待检测点;i(pi)表示点pi的像素值,像素值为0或1,其中,i表示从0到7为点p的8邻域;v表示对p点是否为端点的判定,若v=2则该点为端点,若v为其他值则p点为非端点。
40、由上述技术方案可知,本发明的有益效果为:第一,本发明通过对sentinel-1sar影像作为研究对象,有效解决了传统光学影像受天气和光照影响大、数据获取不连续等缺点;第二,本发明实现了对湖泊围网养殖区的精确提取,相较于传统图像处理算法具有计算简单,效果好等优点;第三,本发明采用的u-net网络结构极大降低了网络参数设置的复杂度,与传统的图像处理技术相比,具有局部感知和参数共享特点,显著降低了模型的复杂度,减少了权值数量,同时,由于网络本身具有特征提取功能,可有效从样本中学习相应特征,避免了复杂的特征提取过程;第四,本发明相比于传统的影像分析方法,如边缘检测、区域生长等,能够及时、快速、准确地实现湖泊围网养殖区的自动提取,同时本发明中的算法具有运行时间短、提取精度高、鲁棒性能好等优势。
本文地址:https://www.jishuxx.com/zhuanli/20241106/323858.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。