基于多视角投影的物体对称轴检测方法及系统与流程
- 国知局
- 2024-11-18 18:24:12
本发明涉及图像处理,特别涉及基于多视角投影的物体对称轴检测方法及系统。
背景技术:
1、在3d领域中,物体的对称轴检测是评估其朝向与展示效果的关键指标。正确识别对称轴不仅有助于精确定位物体的方向,还能在用户旋转物体以多角度观察时,提供更为流畅和逼真的视觉体验。对称轴的特性主要包括:其一,物体绕此轴旋转时,其形态应保持不变,避免左右偏移;其二,旋转过程中,物体需维持直立向上的姿态。
2、现有技术中,例如中国专利cn105184830b公开了一种对称图像对称轴检测定位方法,通过边缘提取、梯度计算和hough变换等步骤来定位对称轴,但该方法在边缘点中垂线的选择上精度有限,进而影响最终结果的准确性。
3、中国专利cn106780528b公开了基于边缘线匹配的图像对称轴检测方案,尽管该方法适用于图像处理,但在面对3d物体对称轴检测时,其效率较低且边缘匹配的不稳定性限制了其应用范围。
4、中国专利cn108010036b公开了一种基于rgb-d相机的物体对称轴检测方法,通过构建点云并以质心为中心定位候选对称平面,进而分析点云分布来评估对称性。然而,该方法在点云分布不均时面临挑战,因为质心可能并非物体的真实几何中心,且点云数量的差异并不总能准确反映物体的对称特性,即便在分布均匀的情况下,也存在局限性。
5、综上所述,对于单张图像进行对称轴检测,传统方法多聚焦于提取显著的特征点或边缘线,并通过这些特征的匹配来估算对称轴;然而,这些方法存在局限性:特征点匹配方法易受到图像中特征点稀缺或误识别的影响,导致检测失败;而边缘线匹配方法则可能因边缘复杂性或模糊性而无法有效匹配,限制了其通用性。对于3d物体对称轴的确定,一些现有算法采用基于点云数量的简单统计或暴力搜索方法,尽管操作直接,但精度往往不足,难以满足我们特定场景中的高精度需求;此外,还有算法假设点云数据本身就是对称的,这在实际应用中是一大限制,在现实世界中的物体很可能是非对称的,这样的前提假设限制了算法的适用范围。
6、因此,如何提供基于多视角投影的物体对称轴检测方法及系统,是目前亟待解决的问题。
技术实现思路
1、本发明实施例提供了基于多视角投影的物体对称轴检测方法及系统,以解决现有技术中存在的上述技术问题。
2、为了对披露的实施例的一些方面有一个基本的理解,下面给出了简单的概括。该概括部分不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围。其唯一目的是用简单的形式呈现一些概念,以此作为后面的详细说明的序言。
3、根据本发明实施例的第一方面,提供了基于多视角投影的物体对称轴检测方法。
4、在一个实施例中,基于多视角投影的物体对称轴检测方法,该方法包括:
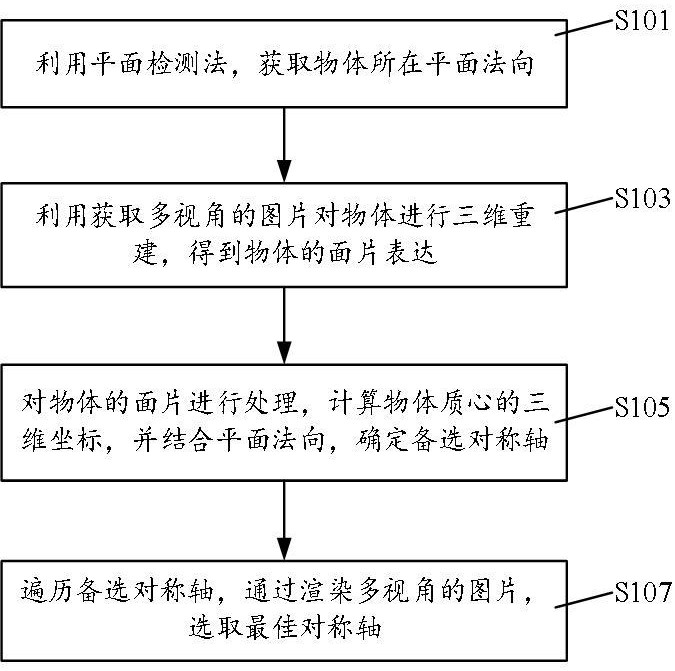
5、利用平面检测法,获取物体所在平面法向;
6、利用获取多视角的图片对物体进行三维重建,得到物体的面片表达;
7、对物体的面片进行处理,计算物体质心的三维坐标,并结合平面法向,确定备选对称轴;
8、遍历备选对称轴,通过渲染多视角的图片,选取最佳对称轴。
9、在一个实施例中,所述利用平面检测法,获取物体所在平面法向包括:
10、对物体进行平面检测,并基于物体平面检测结果预设若干组拍摄点位;
11、利用预设的拍摄点位对物体进行拍摄,获取多视角的图片;
12、基于多视角的图片,得到物体所在平面法向。
13、在一个实施例中,所述对物体的面片进行处理,计算物体质心的三维坐标,并结合平面法向,确定备选对称轴包括:
14、利用光度测量软件,计算每张图片对应的相机参数;
15、对每张图片进行图像分割,并结合开源计算机视觉库,提取分割图像中的物体轮廓;
16、基于分割图像中的物体轮廓,计算每个轮廓所代表物体面片质心的像素坐标;
17、根据物体面片质心的像素坐标与相机参数,利用最小二乘法计算物体质心的三维坐标;
18、结合物体质心的三维坐标与平面法向,确定备选对称轴。
19、在一个实施例中,所述基于分割图像中的物体轮廓,计算每个轮廓所代表物体面片质心的像素坐标包括:
20、根据分割图像中的物体轮廓,计算每个物体轮廓的面积;
21、基于每个物体轮廓的面积,获取轮廓点的横轴一阶矩及纵轴一阶矩;
22、综合物体轮廓的面积、轮廓点的横轴一阶矩及纵轴一阶矩,得到面片的质心的像素坐标。
23、在一个实施例中,所述根据物体面片质心的像素坐标与相机参数,利用最小二乘法计算物体质心的三维坐标的计算公式包括:
24、
25、式中, c表示4*4的矩阵; k表示相机内参数; m表示相机外参数; c ij表示第i行j列的值; n表示图片的数量; x i表示第i张图片的质心的横轴坐标; y i表示第i张图片的质心的纵轴坐标; x表示物体质心的三维横坐标; y表示物体质心的三维纵坐标; z表示物体质心的三维竖坐标。
26、在一个实施例中,所述结合物体质心的三维坐标与平面法向,确定备选对称轴包括:
27、将平面法向作为初始对称轴;
28、以物体质心的三维坐标作为原点,初始对称轴作为轴心,构建圆锥面;
29、基于构建的圆锥面,等间距选取若干直线,并将每个直线作为备选对称轴。
30、在一个实施例中,所述备选对称轴的公式为:
31、
32、式中, up表示备选对称轴的朝向; θ表示在平面上的投影与横轴的夹角; φ表示备选对称轴与纵轴的夹角。
33、在一个实施例中,所述遍历备选对称轴,通过渲染多视角的图片,选取最佳对称轴包括:
34、遍历备选对称轴,并将备选对称轴作为新的纵轴,物体围绕新的纵轴按照预设的角度进行旋转;
35、将相机放置在旋转后的物体前方,采用渲染引擎渲染多视角的图片;
36、从渲染后的图片中提取物体的轮廓点,并计算物体轮廓点的对称性;
37、选取对称性最小的投影,将最小投影对应的备选对称轴作为最佳对称轴。
38、在一个实施例中,所述对称性计算公式为:
39、
40、式中, s表示对称性的值; contourarea表示对称轴左侧轮廓内面积与右侧轮廓内面积的差值; left表示对称轴左侧; right表示对称轴右侧。
41、根据本发明实施例的第二方面,提供了基于多视角投影的物体对称轴检测系统。
42、在一个实施例中,所述基于多视角投影的物体对称轴检测系统,该系统包括:
43、平面法向获取模块,用于利用平面检测法,获取物体所在平面法向;
44、面片表达得到模块,用于利用获取多视角的图片对物体进行三维重建,得到物体的面片表达;
45、备选对称轴确定模块,用于对物体的面片进行处理,计算物体质心的三维坐标,并结合平面法向,确定备选对称轴;
46、最佳对称轴选取模块,用于遍历备选对称轴,通过渲染多视角的图片,选取最佳对称轴。
47、根据本发明实施例的第三方面,提供了一种计算机设备。
48、在一些实施例中,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
49、根据本发明实施例的第四方面,提供了一种计算机可读存储介质。
50、在一个实施例中,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
51、本发明实施例提供的技术方案可以包括以下有益效果:
52、1、本发明通过基于多视角投影的对称轴检测方法,突破了传统单张图像分析的限制,有效应对了特征点稀缺、边缘界限模糊及形状高度不规则的复杂场景,能够根据物体的特性进行灵活调整,实现对多种类型物体的有效对称轴检测,大大拓宽了应用范围。
53、2、本发明通过计算3d物体的质心作为旋转基点,并结合多视角投影图像的比较分析,显著提高了对称轴检测的精度,避免了因旋转基点不准确或点云对称性假设导致的误差,能够更准确地捕捉物体的对称性特征,确保检测结果的可靠性。
54、3、本发明通过从多个视角渲染物体图片,并进行综合比较和分析,实现了对物体对称性的全面评估,多视角验证不仅增强了检测的鲁棒性,还能够在不同视角下捕捉到物体的细微差异,从而更准确地确定最佳对称轴,为后续的应用提供了坚实的基础。
55、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表