一种自动激光清模设备的制作方法
- 国知局
- 2024-11-19 09:43:26
本发明涉及半导体封装,具体为一种自动激光清模设备。
背景技术:
1、半导体封装模具是半导体封装过程中必不可少的工具,它可以使芯片得到更好的封装,提高芯片的可靠性和稳定性。封装模具通常由硅、石英、陶瓷等材料制成,具有很高的精度和精细的结构。
2、现有技术中又很多,如申请号为cn201410053889.x中记载的一种半导体封装行业中对模具的清洁方法,特别是一种清模方法,所述清模方法包括以下步骤,(1)以清模胶条进行2—5次清模处理;(2)以清模料饼进行5~8次清模处理;(3)使用润模料进行润模处理1—3次;所述清模胶条是st2000、st5000或st5100;所述清模料饼是emec-6;所述润模料是emec-110s或iwax。本清模方法主要适用于模具模腔密度高半导体封装模具的清洁,单次清模耗时88~130分钟,清模后无不良品产生。
3、类似上述记载的以往各类塑封模具的清洁都为人工手动灌入清模颗粒及清模胶条合模后注塑清洁,作业时间长,操作步骤复杂。
4、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种自动激光清模设备。
技术实现思路
1、本发明的目的在于提供一种自动激光清模设备,以解决上述背景技术中提出的问题。
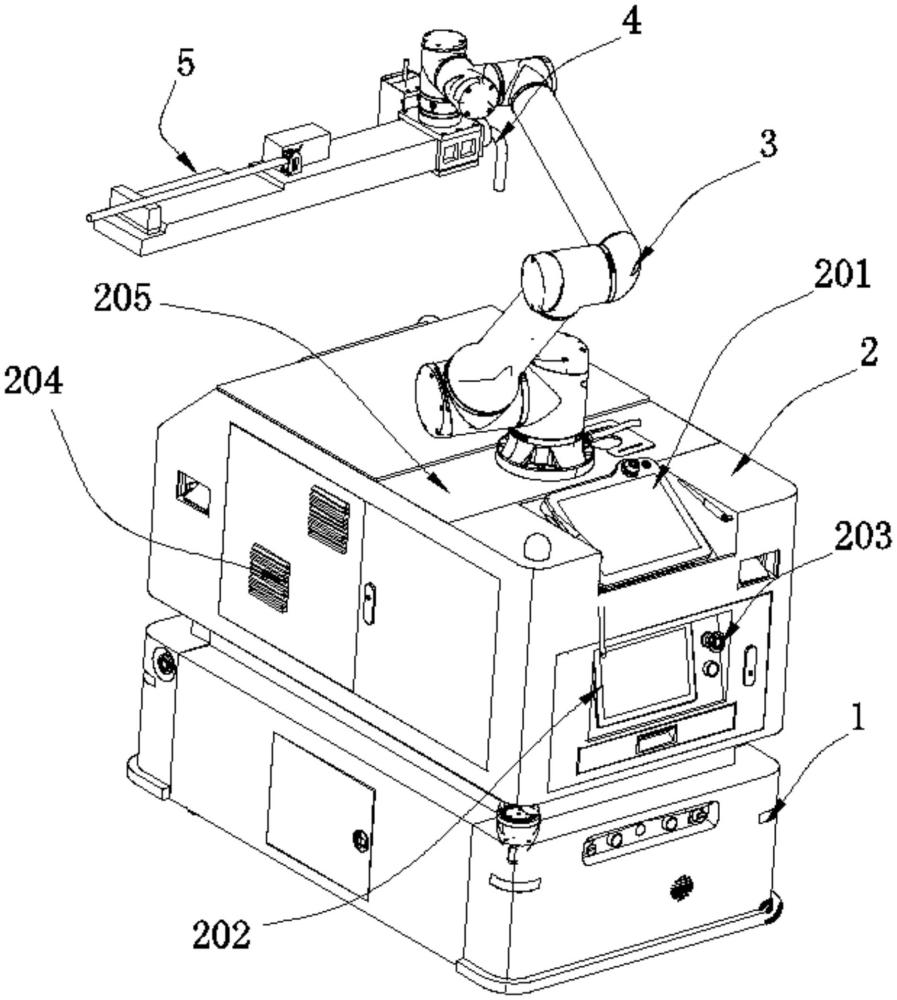
2、为实现上述目的,本发明提供如下技术方案:一种自动激光清模设备,包括agv底座承载车,所述agv底座承载车的上方安装有电器控制柜,且电器控制柜的上方安装有运作手臂机构,所述运作手臂机构上安装有激光清模头和激光定位机构,其中,运作手臂机构包括底座柱、第一旋转轴、第一机械臂、第二旋转轴和第二机械臂,其中,底座柱的一侧安装有第一旋转轴,且第一旋转轴的中部安装有第一机械臂,所述第一机械臂远离第一旋转轴的一端安装有第二旋转轴,且第二旋转轴的一侧安装有第二机械臂,所述激光清模头中包括有安装盒和清洗激光发射器,其中,安装盒的一侧安装有清洗激光发射器,且清洗激光发射器的发射端安装有激光头。
3、进一步的,所述agv底座承载车包括承载车主体、电动轮和行走指示灯,其中承载车主体的内部安装有行走指示灯,且承载车主体的底部安装有用于支撑agv底座承载车行走的电动轮,同时电动轮的内部安装有电机。
4、进一步的,所述电器控制柜的一侧安装有触摸控制板,且触摸控制板的下方安装有液晶显示板,同时液晶显示板的一侧安装有紧急制动按钮,所述电器控制柜中设置有芯片,且芯片采用i5处理器用以控制激光清模头和激光定位机构。
5、进一步的,所述电器控制柜的两侧均安装有散热板,且电器控制柜的上方安装有用于支撑运作手臂机构的支撑板。
6、进一步的,所述支撑板的上方安装有第一电动转盘,且支撑板通过第一电动转盘与底座柱构成可旋转结构,所述第一旋转轴的内部安装有第一电动机,且第一旋转轴通过第一电动机与第一机械臂构成可旋转结构。
7、进一步的,所述第二旋转轴的内部安装有第二电动机,且第一机械臂第二旋转轴与第二机械臂构成可旋转结构。
8、进一步的,所述运作手臂机构中还包括有第三旋转轴和第二电动转盘,其中第三旋转轴安装在第二机械臂的一端,且第三旋转轴的内部安装有第三电动机,且第三旋转轴的一侧安装有第一转向轴,所述转向轴的一侧安装有第二转向轴,且第二转向轴的一端安装有第二电动转盘,同时第二转向轴通过第二电动转盘与激光清模头构成可旋转结构。
9、进一步的,所述第二转向轴通过第二电动转盘与安装盒构成可旋转结构。
10、进一步的,所述激光定位机构包括定位激光发射器、第一定位激光探头、电动旋转轴和第二定位激光探头,其中,定位激光发射器安装在安装盒的表面,且定位激光发射器的一侧安装有第一定位激光探头,所述安装盒的一侧安装有电动旋转轴,且电动旋转轴远离安装盒的一侧安装有第二定位激光探头。
11、本发明提供了一种自动激光清模设备,具备以下有益效果:本发明实际为设备自动化以自动机器人承载对应清模机通过自动化手臂进行清模作业,一定范围内设备可以实现无人化的作业模式;可以消除人为清洁作业,起到减低人为操作错误风险,提高清模效率,节省人工成本和减少危废(清模胶条)排放的效果;
12、本发明支撑板通过第一电动转盘与底座柱构成可旋转结构,底座柱通过第一电动转盘可以使第一机械臂和第二机械臂进行旋转,从而带动激光清模头进行旋转,第一旋转轴通过第一电动机与第一机械臂构成可旋转结构,第一机械臂第二旋转轴与第二机械臂构成可旋转结构,第二转向轴通过第二电动转盘与激光清模头构成可旋转结构,在实际的使用过程中,通过第一旋转轴、第二旋转轴和第三旋转轴的旋转来改变第一机械臂第二旋转轴的高度和角度;
13、激光清模头通过激光定位机构进行定位,具体为,通过第一定位激光探头和第二定位激光探头来探测模具上需要清理的污渍,而探测到污渍后,清洗激光发射器通过激光头发射激光对模具上的污渍进行清理。
技术特征:1.一种自动激光清模设备,其特征在于,包括agv底座承载车(1),所述agv底座承载车(1)的上方安装有电器控制柜(2),且电器控制柜(2)的上方安装有运作手臂机构(3),所述运作手臂机构(3)上安装有激光清模头(4)和激光定位机构(5),其中,运作手臂机构(3)包括底座柱(302)、第一旋转轴(303)、第一机械臂(305)、第二旋转轴(306)和第二机械臂(308),其中,底座柱(302)的一侧安装有第一旋转轴(303),且第一旋转轴(303)的中部安装有第一机械臂(305),所述第一机械臂(305)远离第一旋转轴(303)的一端安装有第二旋转轴(306),且第二旋转轴(306)的一侧安装有第二机械臂(308),所述激光清模头(4)中包括有安装盒(401)和清洗激光发射器(402),其中,安装盒(401)的一侧安装有清洗激光发射器(402),且清洗激光发射器(402)的发射端安装有激光头(403)。
2.根据权利要求1所述的一种自动激光清模设备,其特征在于,所述agv底座承载车(1)包括承载车主体(101)、电动轮(102)和行走指示灯(103),其中承载车主体(101)的内部安装有行走指示灯(103),且承载车主体(101)的底部安装有用于支撑agv底座承载车(1)行走的电动轮(102),同时电动轮(102)的内部安装有电机。
3.根据权利要求1所述的一种自动激光清模设备,其特征在于,所述电器控制柜(2)的一侧安装有触摸控制板(201),且触摸控制板(201)的下方安装有液晶显示板(202),同时液晶显示板(202)的一侧安装有紧急制动按钮(203),所述电器控制柜(2)中设置有芯片,且芯片采用i5处理器用以控制激光清模头(4)和激光定位机构(5)。
4.根据权利要求3所述的一种自动激光清模设备,其特征在于,所述电器控制柜(2)的两侧均安装有散热板(204),且电器控制柜(2)的上方安装有用于支撑运作手臂机构(3)的支撑板(205)。
5.根据权利要求4所述的一种自动激光清模设备,其特征在于,所述支撑板(205)的上方安装有第一电动转盘(301),且支撑板(205)通过第一电动转盘(301)与底座柱(302)构成可旋转结构,所述第一旋转轴(303)的内部安装有第一电动机(304),且第一旋转轴(303)通过第一电动机(304)与第一机械臂(305)构成可旋转结构。
6.根据权利要求1所述的一种自动激光清模设备,其特征在于,所述第二旋转轴(306)的内部安装有第二电动机(307),且第一机械臂(305)第二旋转轴(306)与第二机械臂(308)构成可旋转结构。
7.根据权利要求6所述的一种自动激光清模设备,其特征在于,所述运作手臂机构(3)中还包括有第三旋转轴(310)和第二电动转盘(313),其中第三旋转轴(310)安装在第二机械臂(308)的一端,且第三旋转轴(310)的内部安装有第三电动机(309),且第三旋转轴(310)的一侧安装有第一转向轴(311),所述转向轴(311)的一侧安装有第二转向轴(312),且第二转向轴(312)的一端安装有第二电动转盘(313),同时第二转向轴(312)通过第二电动转盘(313)与激光清模头(4)构成可旋转结构。
8.根据权利要求7所述的一种自动激光清模设备,其特征在于,所述第二转向轴(312)通过第二电动转盘(313)与安装盒(401)构成可旋转结构。
9.根据权利要求8所述的一种自动激光清模设备,其特征在于,所述激光定位机构(5)包括定位激光发射器(501)、第一定位激光探头(502)、电动旋转轴(503)和第二定位激光探头(504),其中,定位激光发射器(501)安装在安装盒(401)的表面,且定位激光发射器(501)的一侧安装有第一定位激光探头(502),所述安装盒(401)的一侧安装有电动旋转轴(503),且电动旋转轴(503)远离安装盒(401)的一侧安装有第二定位激光探头(504)。
技术总结本发明公开了一种自动激光清模设备,涉及半导体封装技术领域,包括AGV底座承载车,所述AGV底座承载车的上方安装有电器控制柜,所述运作手臂机构上安装有激光清模头和激光定位机构,其中,底座柱的一侧安装有第一旋转轴,且第一旋转轴的中部安装有第一机械臂,所述激光清模头中包括有安装盒和清洗激光发射器,其中,安装盒的一侧安装有清洗激光发射器,且清洗激光发射器的发射端安装有激光头。本发明实际为设备自动化以自动机器人承载对应清模机通过自动化手臂进行清模作业,一定范围内设备可以实现无人化的作业模式;可以消除人为清洁作业,起到减低人为操作错误风险,提高清模效率,节省人工成本和减少危废清模胶条排放的效果。技术研发人员:杨裕玮,王暑光受保护的技术使用者:宁波裕准精密科技有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329942.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表