一种新能源汽车自适应路径规划系统
- 国知局
- 2024-11-19 09:44:32
本发明涉及自动驾驶,尤其涉及一种新能源汽车自适应路径规划系统。
背景技术:
1、在人工智能急速发展的大背景下,以及车互联网等技术的支持下,自动驾驶技术在智能汽车领域的发展极为快速,其技术可以实现车辆的自主行驶,提高交通效率,减少交通拥堵;
2、现有自动大多自动驾驶的依托于激光雷达的点云图进行构建周围场景,通过r0s(机器人操作系统)来进行全局规划和局部规划从而实现自动驾驶,目前多数路径规划系统都部署于云端,会出现各种数据的处理都希望往云上面靠的现象,导致云上的数据越来越多,易产生较高的传输延迟,且云端在处理多个无人驾驶的路径规划请求时,云端花时间处理完后往回传,也会产生较大的计算延迟和等待时延,易造成驾驶过程中的安全事故;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于:提出一种新能源汽车自适应路径规划系统,通过设置云端,将云端资源与边缘设备终端相结合,解决了云端的信息滞后造成安全事故的问题。
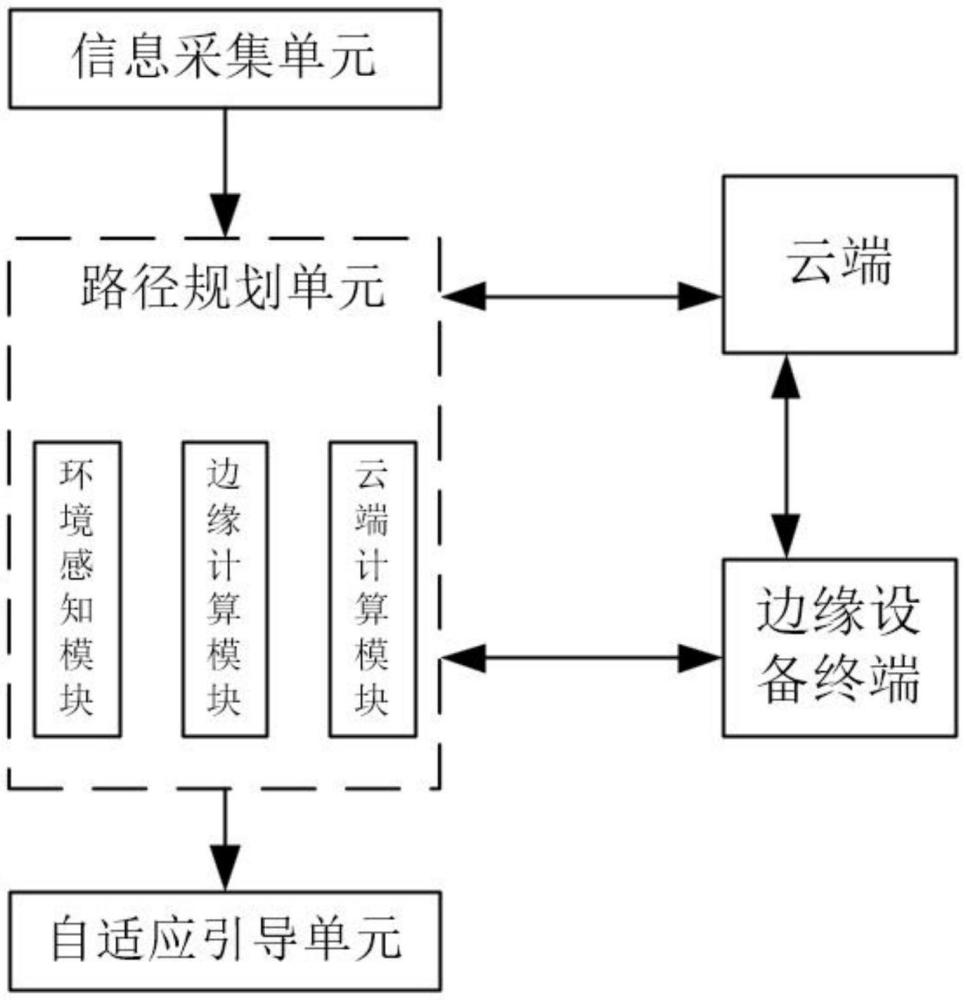
2、为了实现上述目的,本发明采用了如下技术方案:一种新能源汽车自适应路径规划系统,包括云端,云端与边缘设备终端通信连接,还包括信息采集单元、路径规划单元和自适应引导单元,信息采集单元、路径规划单元和自适应引导单元之间信号连接;
3、信息采集单元设置采集周期,对雷达探测器和激光测距仪探测的相关数据进行定时采集,并将相关数据发送给路径规划单元;其中,相关数据包括但不限于路径信息、地图信息和障碍物信息;
4、路径规划单元包括环境感知模块、边缘计算模块和云端计算模块,环境感知模块、边缘计算模块和云端计算模块之间信号连接;
5、环境感知模块通过相关数据进行特征提取,提取的特征包括三维坐标信息、多普勒速度信息、反射特性信息和时间戳,进而将提取的特征代入预设的点云图分析模型中,生成预设地图环境模型;
6、当车端向边缘设备终端发出路径请求信号,边缘计算模块立即判断当前请求目标点是否处于当前边缘设备终端的地图范围内,当判断结果处于范围之内,边缘设备终端向云端发送路径请求信号,云端计算模块根据预设地图环境模型进行路径规划,同时发出自检信号,还将自检信号发送给自引导适应单元;
7、反之,当判断结果不处于范围之内,边缘计算模块立即判断是否存在缓存路径,若存在缓存路径,直接返回路径;若不存在缓存路径,则通过路径规划算法规划出最佳路径规划,同时将路径更新到路径缓存中;
8、自引导适应单元接收到自检信号后,获取云端的当前运行信息,并对云端的当前运行信息进行判定分析,判定网络传输延迟程度,根据分析结果判断是否进行自检运算,当存在自检运算,则将进行自检运算后的运算结果返回给边缘设备终端,边缘设备终端根据实际情况生成对应的方案;反之,当不存在自检运算,生成正常信号返回给路径规划单元。
9、进一步的,生成预设地图环境模型的具体工作过程为:
10、步骤a1,通过以提取的三维坐标信息构建拓扑特征空间,并将该特征空间形成的图结构标记为v1;同时以提取的多普勒速度信息-反射特性信息构建出动态特征空间,并将该特征空间形成的图结构标记为v2;同时将拓扑特征空间和动态特征空间进行相互叠合,并将该叠合的特征空间形成的图结构标记为v3;
11、步骤a2,构建图神经网络,通过将图神经网络在拓扑特征空间所对应的图结构v1上传播节点信息并更新节点特征以获得特定嵌入h1;同时通过将图神经网络在动态特征空间所对应的图结构v2上传播节点信息并更新节点特征以获得特定嵌入h2;同时通过图神经网络在叠合特征空间所对应的图结构v3上传播节点信息并更新节点特征以获得特定嵌入h3;
12、步骤a3,通过将特定嵌入h1、特定嵌入h2和特定嵌入h3分别进行特征提取,进而将提取的特征进行权重更新,并对图神经网络的最后一层进行权重初始化,使用梯度下降算法进行学习,重新训练整个网络,获得预设地图环境模型。
13、进一步的,根据预设地图环境模型进行路径规划的具体工作过程为:
14、步骤b1,根据预设地图环境模型提取该对应地图的障碍物特征、道路通行特征、道路边界特征和建筑物位置特征,并将上述特征进行合并,获得第一全局特征;
15、步骤b2,获取当前请求目标点所在的地图范围,预设请求目标点有n0个,并以该当前请求目标点向外扩散r个长度,且以r为半径进行画圆,进而获取相邻请求目标点之间的距离特征和曲率特征,并将上述特征进行合并,获得第二全局特征;
16、步骤b3,对第一全局特征和第二全局特征进行特征匹配,并根据特征匹配结果建立点云数据,生成行驶的环境空间模型,进而根据该环境空间模型进行路径规划。
17、进一步的,云端计算模块还对路径规划进行共享处理:
18、步骤c1,建立区域分布图,预设边缘设备终端有n1个,并在区域分布图上标定n1个边缘设备终端的分布位置,将任一边缘设备终端的位置坐标标记为b(xb,yb,zb),同时标记每个车端选择的预设路径,并获得对应的车端车辆信息,包括但不限于车主姓名、车辆车牌号、车辆速度和行车习惯;
19、步骤c2,将当前任一车端发出的请求点标记为m0,将其开始发出请求时间到规划路径时间标记为时间阈值,进而将时间阈值划分为i个子时间节点,且i为大于0的自然数;
20、步骤c3,在任一子时间节点中,将每个车端作为一个用户节点,每个规划路径作为一个路径节点,将车端选择规划路径的行为作为一条边,从而构建出车端路径属性网络;同时基于任一时间节点对车端路径属性网络进行一次网络快照的生成,并将网络快照进行时序组合,生成一个动态属性网络,并将该动态属性网络上传至云端进行共享。
21、进一步的,在进行共享的过程中,还包括权限制定:
22、步骤c3-1,将云端所对应的数据库进行网格划分,并划分为n2个网格区间,并将共享的存储信息按照隐私程度分配给n2个网格区间内,对于任意一个网格区间设置相应的调用权限;还设置n3个调用角色层级,且任意一个调用角色层级n3j下有m1个调用端口,且j为正整数,进而根据调用层级设置不同的权限标签;其中,调用角色层级至少包括云端层级、车端层级以及边缘设备终端层级;
23、步骤c3-2,设置端口用户名,并获取该端口用户的调用角色层级,进而获取该端口用户的角色属性和请求点地址,以进行相应的权限层级匹配;其中,每一权限层级描述了相应的角色属性和请求点地址。
24、进一步的,路径规划算法基于蚁群算法设计,对应的设计过程为:
25、步骤d1,通过预设地图环境模型初始化算法参数,包括但不限于迭代次数t0、最大迭代次数为tmax、蚂蚁数量sm、信息素挥发因子ρ以及启发函数重要程度因子β,同时根据上一时间节点车端选择的路径初始化信息素分布;
26、步骤d2,预设当前时间节点的任一请求点m0的起始位置为起始节点,开始进行迭代操作,sm群蚂蚁从起始节点开始搜索路径;
27、步骤d3,根据状态转移概率公式计算sm个蚂蚁将要到达的下一节位置;
28、步骤d4,设定车端的目地位置为目标节点,当到达目标节点,则一轮迭代结束,保存此迭代为最优路径,并更新信息素浓度,进而更新信息素挥发因子ρ和启发函数重要程度因子β,反之,当没有到达目标节点,则重复步骤d3操作;
29、步骤d5,重复步骤d2-步骤d4的迭代操作,当迭代次数达到最大迭代次数为tmax,输出最佳路径规划。
30、进一步的,判定分析的具体工作过程如下:
31、运行信息包括上传云端的路径规划数量和路径请求响应速度,并分别标记为g1和g2;
32、步骤e1,提取时间阈值内的几个相邻子时间节点,并组合形成时间段,获取该时间段内的运行信息,以构建监测向量<路径规划数量g1,请求响应速度g2,时间time>,统计每一个时间段内的运行信息的平均值和波动值,对于任意一个时间段ta,标记该时间段ta内的路径规划数量g1以及请求响应速度g2的平均值分别为mg1以及mg2,和波动值分别为dg1以及dg2;其中,波动值表示该时间段ta运动信息对应的最大值和最小值之间的差值;
33、进而并按照不同的组合构建判断向量;
34、步骤e2,预设一个判断模型,进而将任一判断向量代入判断模型中,生成判断结果;同时设置判断结果的阈值,当该判断结果小于预设阈值,判定网络传输存在较高延迟,进而进行自检运算,具体为:通过边缘设备终端运行自检运算程序,并统计边缘设备终端运行自检运算时的运算速度,将该运算速度与预设的运算速度进行对比,若该运算速度小于预设的运算速度则生成边缘设备终端负荷能力损失信号,若该运算速度大于等于预设的运算速度则生成边缘设备终端负荷能力正常运行信号。
35、综上所述,由于采用了上述技术方案,本发明的有益效果是:
36、本发明通过设置云端,云端与边缘设备终端之间通信连接,还包括信息采集单元、路径规划单元和自适应引导单元;先通过雷达探测器和激光测距仪探测的相关数据进行定时采集,进而通过提取三维坐标信息、多普勒速度信息、反射特性信息和时间戳的特征,生成预设的地图环境模型;当车端发出路径请求信号,边缘计算模块立即判断当前请求目标点是否处于当前边缘设备终端的地图范围内,当判断结果处于范围之内,边缘设备终端向云端发送路径请求信号,云端计算模块根据预设地图环境模型进行路径规划,同时发出自检信号发送给自引导单元,进而对云端的当前运行信息进行判定分析以判定网络传输延迟程度,当网络传输延迟程度较高,便进行自检运算,将自检运算的结果返回给边缘设备终端,并进行实际的方案生成;当判断结果不处于范围之内,边缘计算模块立即判断是否存在缓存路径,若存在缓存路径,直接返回路径;若不存在缓存路径,则通过路径规划算法规划出最佳路径规划,同时将路径更新到路径缓存中;在这一过程中,云端还支持多辆车之间的信息互通,构建万物互联,大幅提升了安全性和效率,且在路径选择的过程中,终端会依据实际情况进行取舍,以防止因为云端的信息滞后造成安全事故。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330015.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。