无线测斜水位一体式机器人的制作方法
- 国知局
- 2024-11-19 10:02:01
本发明涉及深层水平位移检测,特别涉及一种无线测斜水位一体式机器人。
背景技术:
1、近年来,随之信息技术飞速发展,社会的信息化发展也给岩土工程监测信息化建设带来了新的机遇,基坑自动化监测具有结构简单、清晰、集中式的数据库管理、并容易保证数据的一致性、提供全天候、三维立体、实时连续和高精度定位,深层水平位移作为基坑监测重要参数之一。
2、目前的深层水平位移检测装置大多使用通讯电缆作为动力连接采集终端,通讯电缆多次使用后会很快老化,破损或进水,容易导致采集终端采集失败,此时就需要采用无线的采集终端进行深层检测,在采集终端在沿测斜管向下移动的过程中,通常会采用加速度计(mems传感器)测量重力加速度在不同的轴向上的数据来反映出对应轴与重力方向的角度,通过角度的变化从而计算出对应的长度杆的位移量,当测斜管随之变形,测斜探头上滑轮顺槽而下逐点测试,在此过程中,采集终端在测斜管中移动时容易受到横向振动力的影响,同时采集终端向下移动的过程中也会受到很大的冲击力,这样的情况都会影响到加速度计(mems传感器)的检测精度,不利于对深层水平位移的数据准确分析。
3、因此,发明一种无线测斜水位一体式机器人解决上述问题。
技术实现思路
1、本发明的主要目的在于提供一种无线测斜水位一体式机器人,可以有效解决背景技术中的技术问题。
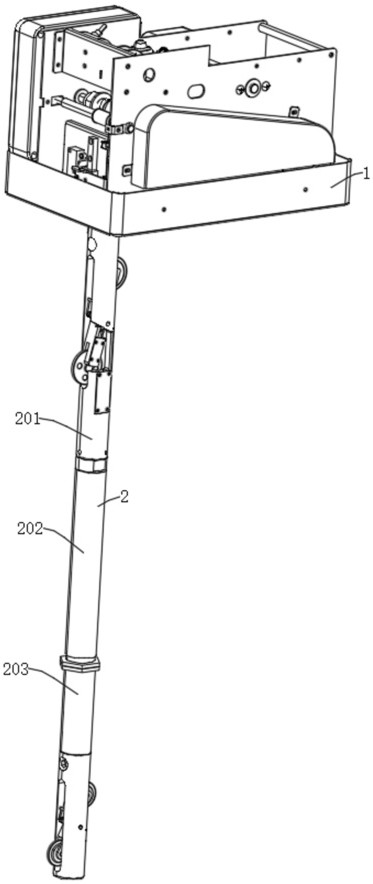
2、为实现上述目的,本发明采取的技术方案为:无线测斜水位一体式机器人,包括机体和采集管,所述机体和所述采集管之间设置有钢丝绳,还包括:
3、收放线机构,所述收放线机构设置在所述机体内,用于对钢丝绳的收卷和放开;
4、采集机构,所述采集机构设置在所述采集管的内部,用于对深层水平位移量和深层水位高度的数据采集;
5、减振机构,所述减振机构设置在所述采集机构上,用于减缓采集机构发生的振动。
6、优选地,所述采集管还包括依次上下螺纹连接的上管、中管及下管,所述采集机构还包括多个沿所述中管周向间隔设置且与所述中管内壁滑动连接的支撑盒,每个所述支撑盒靠近所述中管轴线的一侧均设有支撑杆,多个所述支撑杆的自由端之间共同固定连接有圆盘,所述圆盘的其中一端面上设有微机电传感器,所述下管内设置有水位传感器。
7、优选地,所述减振机构还包括多个与所述支撑盒相对应且与所述支撑盒滑动连接的减振板,每个所述减振板上均固定连接有支撑架,每个所述支撑架均伸出所述支撑盒且与相对应的支撑杆滑动连接,每个所述支撑架两端均铰接有连杆,每个所述连杆自由端均铰接有减振块,每个所述减振块均通过滑块与所述圆盘滑动连接,同一个所述支撑架上的两个所述滑块的相背端均通过第一弹性件与其相邻的滑块连接。
8、优选地,同一个所述支撑架上的两个所述减振块的相背端均设有辅助块,每个所述辅助块上均开设有推槽,所述中管内设有多个与所述支撑盒相对应的固定杆,每个所述固定杆两端均设有位于相对应的所述推槽内的固定架,每个固定架两端均设有与所述推槽侧壁接触的压杆。
9、优选地,每个所述支撑盒均通过滑板与所述中管滑动连接,每个所述滑板两端均通过第二弹性件与所述中管连接,所述中管内固定连接有控制主板,所述水位传感器和微机电传感器与所述控制主板电连接,所述中管和下管之间拆卸连接有蓄电池,所述蓄电池用于向所述控制主板供电。
10、优选地,所述上管和下管上均开设有通槽,每个通槽内均转动连接有支架,每个所述支架两端均转动连接有导向轮,每个所述通槽内两侧均设有扭簧,所述支架位于两个所述扭簧之间且与扭簧连接。
11、优选地,所述收放线机构还包括与所述机体转动连接的传动轴,所述传动轴上同轴设有绕线轮,所述机体内转动连接有位于所述传动轴任意一侧的从动轴,所述从动轴上同轴设有收放轮,所述机体上转动连接有位于所述收放轮一侧的摩擦辊,所述机体上转动连接有多个位于所述收放轮和绕线轮之间的导线辊。
12、优选地,所述机体上转动连接有位于所述收放轮任意一侧的计米轮,所述计米轮其中一侧设有编码器,所述钢丝绳缠绕在所述绕线轮上,所述钢丝绳自由端依次绕过导线辊和计米轮且位于收放轮和摩擦辊之间。
13、优选地,所述机体内滑动连接有位于绕线轮和导线辊之间的梳线架,所述机体上转动连接有往复丝杆,所述往复丝杆与所述梳线架螺纹连接,所述钢丝绳从梳线架上穿过。
14、优选地,所述机体内安装有电机,所述电机输出端和传动轴一端均同轴设有第一链轮,两个所述第一链轮之间通过第一链条连接,所述传动轴另一端和从动轴上均同轴设有第二链轮,两个所述第二链轮之间通过第二链条连接,所述机体和传动轴上设有第三链轮,所述机体上的第三链轮与所述机体转动连接,两个所述第三链轮之间通过第三链条连接,所述机体上的第三链轮和往复丝杆上均同轴设有齿轮,两个所述齿轮相啮合。
15、本发明的技术效果和优点:
16、1、本发明通过设置的收放轮、摩擦辊和绕线轮能够将钢丝绳稳定自动收放,保证采集管在测斜管中移动的稳定性,能够有效地提高采集管采集数据的准确度,且通过往复丝杆带动梳线架往复运动,能够将钢丝绳整齐地缠绕在绕线轮上,避免了钢丝绳出现散乱的问题,且在编码器和计米轮,能够对钢丝绳释放的长度进行编码且传输到控制终端,能够有效把控基坑的深度,进一步提高施工工程的安全性。
17、2、本发明通过设置的减振板通过支撑架和连杆带动减振块沿圆盘的圆周侧滑动,能够使得管壁振动的力通过减振板和减振块逐级分散,最终通过圆盘的圆周侧进行分散,同时受到纵向的冲击力时,能够通过辅助块和推槽将冲击力在圆盘的圆周侧进行分散,减小冲击力,能够有效避免振动力和冲击力对微机电传感器(加速度计)检测精度的影响,从而能够精确地检测出水平位移量,进一步地保证施工工程的安全进行。
技术特征:1.无线测斜水位一体式机器人,其特征在于,包括机体和采集管,所述机体和所述采集管之间设置有钢丝绳,还包括:
2.根据权利要求1所述的无线测斜水位一体式机器人,其特征在于:所述采集管还包括依次上下螺纹连接的上管、中管及下管,所述采集机构还包括多个沿所述中管周向间隔设置且与所述中管内壁滑动连接的支撑盒,每个所述支撑盒靠近所述中管轴线的一侧均设有支撑杆,多个所述支撑杆的自由端之间共同固定连接有圆盘,所述圆盘的其中一端面上设有微机电传感器,所述下管内设置有水位传感器。
3.根据权利要求2所述的无线测斜水位一体式机器人,其特征在于:所述减振机构还包括多个与所述支撑盒相对应且与所述支撑盒滑动连接的减振板,每个所述减振板上均固定连接有支撑架,每个所述支撑架均伸出所述支撑盒且与相对应的支撑杆滑动连接,每个所述支撑架两端均铰接有连杆,每个所述连杆自由端均铰接有减振块,每个所述减振块均通过滑块与所述圆盘滑动连接,同一个所述支撑架上的两个所述滑块的相背端均通过第一弹性件与其相邻的滑块连接。
4.根据权利要求3所述的无线测斜水位一体式机器人,其特征在于:同一个所述支撑架上的两个所述减振块的相背端均设有辅助块,每个所述辅助块上均开设有推槽,所述中管内设有多个与所述支撑盒相对应的固定杆,每个所述固定杆两端均设有位于相对应的所述推槽内的固定架,每个固定架两端均设有与所述推槽侧壁接触的压杆。
5.根据权利要求2所述的无线测斜水位一体式机器人,其特征在于:每个所述支撑盒均通过滑板与所述中管滑动连接,每个所述滑板两端均通过第二弹性件与所述中管连接,所述中管内固定连接有控制主板,所述水位传感器和微机电传感器与所述控制主板电连接,所述中管和下管之间拆卸连接有蓄电池,所述蓄电池用于向所述控制主板供电。
6.根据权利要求2所述的无线测斜水位一体式机器人,其特征在于:所述上管和下管上均开设有通槽,每个通槽内均转动连接有支架,每个所述支架两端均转动连接有导向轮,每个所述通槽内两侧均设有扭簧,所述支架位于两个所述扭簧之间且与扭簧连接。
7.根据权利要求1所述的无线测斜水位一体式机器人,其特征在于:所述收放线机构还包括与所述机体转动连接的传动轴,所述传动轴上同轴设有绕线轮,所述机体内转动连接有位于所述传动轴任意一侧的从动轴,所述从动轴上同轴设有收放轮,所述机体上转动连接有位于所述收放轮一侧的摩擦辊,所述机体上转动连接有多个位于所述收放轮和绕线轮之间的导线辊。
8.根据权利要求7所述的无线测斜水位一体式机器人,其特征在于:所述机体内安装有电机,所述电机输出端和传动轴一端均同轴设有第一链轮,两个所述第一链轮之间通过第一链条连接,所述传动轴另一端和从动轴上均同轴设有第二链轮,两个所述第二链轮之间通过第二链条连接,所述机体和传动轴上设有第三链轮,所述机体上的第三链轮与所述机体转动连接,两个所述第三链轮之间通过第三链条连接,所述机体上的第三链轮和往复丝杆上均同轴设有齿轮,两个所述齿轮相啮合。
9.根据权利要求7所述的无线测斜水位一体式机器人,其特征在于:所述机体上转动连接有位于所述收放轮任意一侧的计米轮,所述计米轮其中一侧设有编码器,所述钢丝绳缠绕在所述绕线轮上,所述钢丝绳自由端依次绕过导线辊和计米轮且位于收放轮和摩擦辊之间。
10.根据权利要求7所述的无线测斜水位一体式机器人,其特征在于:所述机体内滑动连接有位于绕线轮和导线辊之间的梳线架,所述机体上转动连接有往复丝杆,所述往复丝杆与所述梳线架螺纹连接,所述钢丝绳从梳线架上穿过。
技术总结本发明公开了一种无线测斜水位一体式机器人,涉及深层水平位移检测技术领域,包括机体和采集管,所述机体和所述采集管之间设置有钢丝绳,还包括收放线机构,所述收放线机构设置在所述机体内,用于对钢丝绳的收卷和放开,采集机构,所述采集机构设置在所述采集管的内部,用于对深层水平位移量和深层水位高度的数据采集,减振机构,所述减振机构设置在所述采集机构上,用于减缓采集机构发生的振动;本发明能够精确地检测深层水平位移量的数据。技术研发人员:陈纬,陈经,陈邦早,陈邦孟受保护的技术使用者:浙江城乡工程研究有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/331214.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表