基于动态负载的分布式电机控制方法、系统及电动挖掘机与流程
- 国知局
- 2024-11-21 11:30:42
本发明涉及基于动态负载的分布式电机控制方法、系统及电动挖掘机,属于新能源机械领域。
背景技术:
1、电动挖掘机是一种用于土方工程、矿山开采、建筑施工等领域的重型工程机械设备,具有挖掘、装载、平整、拆除等功能,其工作周期性强,且外部负载多变。而外部负载的变化会影响电机的效率和能耗,在不同的负载条件下,电机可能无法运行在其最高效率点,导致能源浪费。
2、尽管现有的电机控制算法控制电机的启动和响应速度有了显著提高,但是在面对挖掘机复杂的作业环境时,仍存在响应速度不够快的问题,导致挖掘机在处理突变负载时出现性能下降;此外,现有电机控制算法在应对不同工况时,出现能源利用率不高的情况,这意味着在某些作业模式下,电机可能需要更多的能量输入,以保持相同的作业输出,从而降低了整体能效。因此,需要进一步探索电机控制算法,以精确控制电机的功率输出,提高控制系统的稳定性和可靠性。
3、为此,本专利引入神经网络算法识别当前电动挖掘机动作和负载情况,在此基础上设计模糊规则动态确定电机的高功率、次高功率、中功率、低功率和零功率输出,保证电机在各种负载条件下的稳定、高效和经济运行,提高挖掘机的整体工作效率和能源利用率。
4、中国专利cn116513146a基于四个转向电机和四个行走电机构建全电驱动作业机械动力系统,结构复杂,增加系统设计和实施方面难度,且根据soc电量和车身倾角分配行走电机转矩,在复杂工况下易出现分配不均衡的问题,影响作业机械的平稳性和操控性。中国专利cn105297821a通过判定挖掘机处于挖掘和卸载或回转动作状态下,来判定挖掘机的负载为重载或轻载,进而输出所对应的目标功率,分类偏少,无法满足挖掘机在应对多种工况时的动力和能耗要求。中国专利cn108331064b提出一种液压挖掘机负载自适应智能控制装置及系统,主要是调节电比例液压主泵的消耗功率与预先设定的发动机的功率曲线相匹配,并不适用于纯电动挖掘机。
5、因此,为提高策略对工况繁杂、状态时变的纯电动挖掘机的适用性,设计一种基于动态负载的分布式电动挖掘机协调控制系统及方法非常必要。
技术实现思路
1、本发明提供了基于动态负载的分布式电机控制方法、系统及电动挖掘机,解决了背景技术中由于挖掘机作业环境通常较为复杂,操作过程容易受到环境变化的影响,导致挖掘机作业效果不理想。具体来说,挖掘机工作周期性强,外部负载多变,进而影响电机的效率和能耗,在不同的负载条件下,电机因无法运行在其最高效率点而导致能源浪费的问题。基于挖掘机操作手柄电信号及变化率、液压泵压力及变化率和液压泵流量及变化率的采集数据,通过神经网络算法建立挖掘机在不同工作状态和负载情况下的识别模型,即行走、挖掘甩方、装车、怠速、负载和负载变化率,实现对挖掘机工作状态的智能监测和识别。然后,根据挖掘机工作状态、负载、负载变化率和电池soc设立模糊规则,动态调整四个电机的高功率、次高功率、中功率、低功率和零功率输出,相比不使用模糊规则的控制系统,可以使挖掘机更好地适应不同的作业条件,提高控制系统的灵活性、适应性和鲁棒性。更好地实现对电动挖掘机电机功率输出的优化调控,使其在不同工作场景下能够实现最佳的动力输出和效率。
2、为了解决上述技术问题,本发明所采用的技术方案是:
3、基于动态负载的分布式电机控制方法:
4、获取挖掘机动作数据以及电池电量soc;
5、将挖掘机动作数据输入预先训练好的bp神经网络,识别挖掘机的工作模式和负载情况;
6、根据挖掘机的工作模式、负载情况和电量soc,利用模糊规则控制电机的高功率、次高功率、中功率、低功率和零功率输出。
7、进一步地,挖掘机动作数据包括:挖掘机两个操作手柄电信号h1,h2及其变化率ha1,ha2;三个液压泵压力s1,s2,s3及其变化率sa1,sa2,sa3;三个液压泵流量f1,f2,f3及其变化率fa1,fa2,fa3。
8、进一步地,挖掘机的工作模式包括:行走模式w,挖掘甩方模式d,装车模式c和怠速模式i;负载情况包括负载l及负载变化率la。
9、进一步地,所述bp神经网络的训练方法为:
10、输入层节点为动作数据h1,h2,ha1,ha2,s1,s2,s3,sa1,sa2,sa3,f1,f2,f3,fa1,fa2,fa3,输入节点数为g个,g取16对应16个动作数据;隐含层节点数为h个,h取18;输出层节点为挖掘机的负载l及负载变化率la,行走模式w,挖掘甩方模式d,装车模式c和怠速模式i,输出节点数为k个,k取6对应上述6个输出;
11、xg×t=[x1,x2,...,x(t),...,xt]为一组节点数为g、序列为t的输入向量,为g×t维向量;为序列号为t时的输入向量,为1×g维向量;u表示输入层到隐含层的连接权值矩阵,表示为:
12、
13、v表示隐含层到输出层的连接权值矩阵,表示为:
14、
15、d表示隐含层各神经元的阈值矩阵,表示为:
16、d1×h=[d11,d12,...,d1h];
17、e表示输出层各神经元的阈值矩阵,表示为:
18、e1×k=[e11,e12,...,e1k];
19、表示序列t对应的第h个隐含层节点的输入量之和,表示为:
20、
21、表示序列t对应的第h个隐含层节点的输出量,表示为:
22、
23、其中,θ(*)表示隐含层节点的激励函数,取tansig函数。
24、表示序列t对应的第k个输出层节点的输入量之和,k∈[1,k],表示为:
25、
26、表示序列t对应的第k个输出层节点的输出量,表示为:
27、
28、其中,σ(*)表示输出层节点的激励函数,取purelin函数。
29、表示序列t对应的第k个输出层节点的真实值;
30、表示序列t对应的第k个输出层节点的真实值与计算值的误差,表示为:
31、
32、ll(t)表示序列t对应的输出层节点的真实值与计算值的误差平方和,表示为:
33、
34、总体均值方差表示为:
35、
36、利用训练函数traingdx函数和学习函数learngdm函数完成对u、v、d和e的更新,使得ll→0。
37、进一步地,根据挖掘机的工作模式和负载情况,利用模糊规则控制电机的高功率、次高功率、中功率、低功率和零功率输出的方法为:
38、将挖掘机的负载l及负载变化率la,行走模式w,挖掘甩方模式d,装车模式c和怠速模式i以及电量soc作为模糊控制器的输入项,将三个电机:m1,m2,m3和回转电机tm的高功率、次高功率、中功率、低功率和零功率输出作为模糊控制器的输出项,制定模糊规则,实时输出电机功率。
39、进一步地,将挖掘机的负载l及负载变化率la,行走模式w,挖掘甩方模式d,装车模式c和怠速模式i以及电量soc作为模糊控制器的输入项的方法为:
40、将挖掘机的负载l的模糊子集定义为{0,5,10},对应低、中、高,对应的语言变量为{loadl,loadm,loadh};将挖掘机的负载变化率la的模糊子集定义为{0,0.5,1},对应低、中、高,对应的语言变量为{loadratel,loadratem,loadrateh};将挖掘机的行走模式的模糊子集定义为{0,1,2,3},对应怠速模式i、行走模式w、挖掘甩方模式d、装车模式c,对应的语言变量为{怠速i,行走w,挖掘甩方d,装车c};将挖掘机的电量soc的模糊子集定义为{0,0.5,1},对应低、中、高,对应的语言变量为{socl,socm,soch}。
41、进一步地,将三个电机:m1,m2,m3和回转电机tm的高功率、次高功率、中功率、低功率和零功率输出作为模糊控制器的输出项的方法为:
42、将三个电机:m1,m2,m3和回转电机tm的模糊子集定义为{0,1,2,3,4},对应零功率、低功率、中功率、次高功率和高功率,对应的语言变量为{p0,pl,pm,p2h,ph}。
43、进一步地,所述模糊规则为:
44、
45、
46、
47、
48、
49、相应地,本发明还提供基于动态负载的分布式电机控制系统,包括:
50、数据获取模块,用于获取挖掘机动作数据以及电池电量soc;
51、识别模块,用于将挖掘机动作数据输入预先训练好的bp神经网络,识别挖掘机的工作模式和负载情况;
52、模糊规则控制模块,用于根据挖掘机的工作模式、负载情况和电量soc,利用模糊规则控制电机的高功率、次高功率、中功率、低功率和零功率输出。
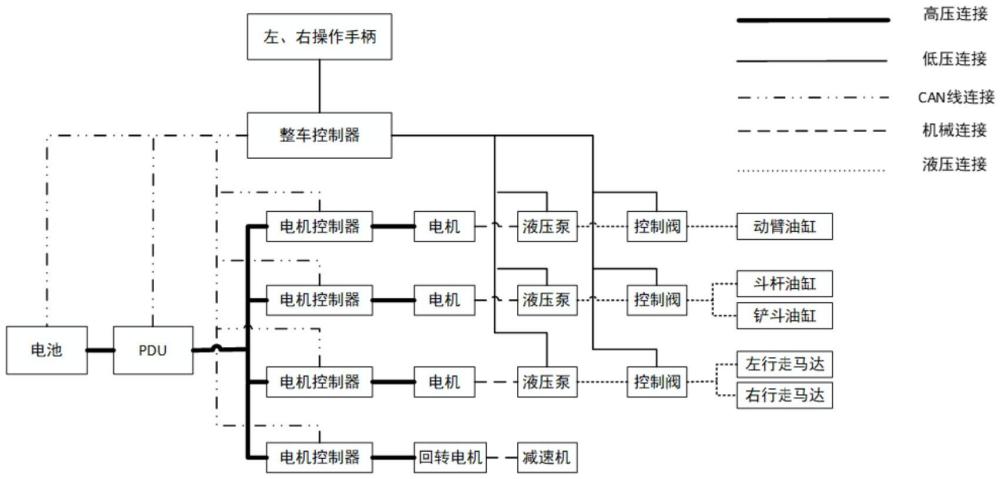
53、相应地,本发明还提供一种电动挖掘机,包括:整车控制器以及与整车控制器通讯连接的电池、pdu、动臂油缸、斗杆油缸、铲斗油缸、左行走马达、右行走马达、左操作手柄和右操作手柄;还包括:电机m1、电机m2、电机m3和回转电机tm;以及上述的基于动态负载的分布式电机控制系统;所述控制系统设于所述整车控制器;所述电机m1输入端通过电机控制器连接pdu,输出端通过液压泵和控制阀连接动臂油缸;所述电机m2输入端通过电机控制器连接pdu,输出端通过液压泵和控制阀连接斗杆油缸和铲斗油缸;所述电机m3输入端通过电机控制器连接pdu,输出端通过液压泵和控制阀连接左行走马达和右行走马达;所述回转电机tm输入端通过电机控制器连接pdu,输出端连接减速机。
54、本发明所达到的有益效果:
55、充分融合bp神经网络的模式识别和模糊控制适应性强的优势,设计出基于动态负载的分布式电动挖掘机协调控制系统及方法。使得在不同负载条件下,电机能够运行在高效率输出区间,从而提高挖掘机的工作效率和性能,减少能源消耗,实现挖掘机在不同工作场景下的最佳动力输出和效率。
本文地址:https://www.jishuxx.com/zhuanli/20241120/331552.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表