一种基于背景抑制的三角位移测距方法与流程
- 国知局
- 2024-11-21 11:30:49
本发明涉及三角位移测距方法领域,具体涉及一种基于背景抑制的三角位移测距方法。
背景技术:
1、传统的激光位移算法在测量过程中受到多种因素的影响,如目标物颜色的反射率变化、激光发射功率波动以及入射角度无法测量等,这些因素导致使用三角位移测距方法的测距精度难以保证。
2、现有技术中有提出使用线性函数对三角位移计算的结果进行拟合,但是由于结构、光学等误差,导致函数线性度差,无法满足高精度应用场景的需求。
技术实现思路
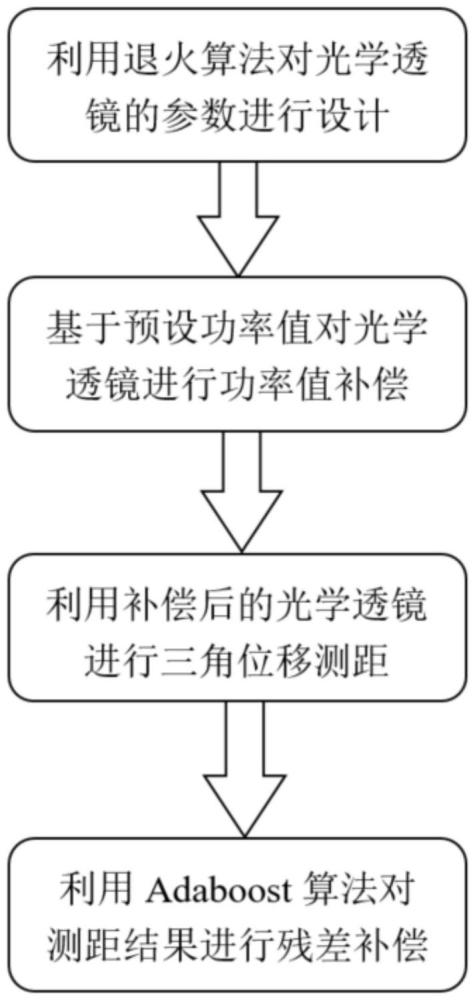
1、为解决上述技术问题,本发明提供了一种基于背景抑制的三角位移测距方法,该基于背景抑制的三角位移测距方法包括以下步骤:
2、步骤一:利用退火算法对光学透镜的参数进行设计,得到光学透镜的设计参数;
3、步骤二:基于光学透镜的设计参数,通过预设的功率值对光学透镜的功率值进行补偿;
4、步骤三:利用补偿后的光学透镜,通过三角位移测距法进行测距,得到测距结果;
5、步骤四:利用adaboost算法对测距结果进行残差补偿,得到补偿后的测距结果。
6、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:光学透镜的设计参数包括曲率半径、厚度以及折射率。
7、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:在步骤1中,退火算法包括以下步骤:
8、(1)、以焦距、透射效率、波前畸变最小化为目标函数;以透镜材料、几何尺寸、制造工艺的成本为约束条件;将光学透镜的曲率半径、厚度以及折射率为初始化参数;
9、(2)、模型随机生成,使得初始化退火温度t0,降温系数a0,在每个温度下的迭代次数l;
10、(3)、令温度t等于冷却进度表中的下一个值ti(第一次迭代时t=t0);
11、(4)、在当前解xi的附近随机产生一个新解xj,新解必须满足约束条件,然后计算新解的目标函数值f(xj)(第一次迭代时xi=xj);
12、(5)、如果f(xj)<f(xi),则接受新解xj,反之,则计算δf=f(xj)-f(xi),并计算接受概率,然后随机生成一个在区间[0,1]上服从均匀分布的随机数,如果,则接受新解r;
13、(6)、在温度ti下,将步骤(4)和(5)重复l次;
14、(7)判断是否满足退出条件,如果满足则退出迭代,否则回到步骤(3)继续迭代。
15、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:在步骤二中,基于预设的功率上限和功率下限,利用未补偿的功率值与上限、下限之间的误差对功率值进行补偿,得到补偿后的功率值。
16、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:对功率值进行补偿时,涉及到的参数包括比例增益、积分增益以及微分增益。
17、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:在步骤三中,三角位移测距法的计算公式为:
18、
19、在上述公式中,y为被测面的移动距离,x为光斑在感光面上的移动距离,激光光束与成像光轴交点为a,a与成像透镜之间夹角α,a点通过成像透镜在感光面上的光斑位置为a`,成像透镜与a`连线与感光面夹角为β,点a的物距为a0,相距为b0。
20、在本发明提供的基于背景抑制的三角位移测距方法中,还可以具有这样的特征:在步骤四中,利用adaboost算法进行残差补偿的步骤包括数据收集、分类器选择、算法训练以及模型组合。
21、本发明的有益效果在于:
22、在本发明的基于背景抑制的三角位移测距方法中,首先利用退火算法对光学透镜进行参数设计,然后在对设计好的光学透镜进行功率值补偿,之后利用该设计好的光学透镜作为成像透镜进行三角位移测距,测距后,再利用adaboost算法对测距后的值进行残差补偿,得到补偿后的位移值。基于该测距方法,在设计光学透镜参数时,不再依赖设计经验和历史测试数据,经过模拟退火对光学参数进行自动优化,减少了设计的盲目性,降低了根据实验结合经验法来获得光学参数的误差,缩短了光学透镜的设计周期。
23、另外,在该方法中,还对光学透镜的参数进行了功率值补充,避免光学透镜因颜色、反光性能以及表面状况(如粗糙度和倾斜度)等因素而影响接收芯片的测量精度的问题,确保测量过程中的准确性和稳定性。避免光量饱和现象的发生,并有效抑制了背景噪声的干扰。相反,当目标物的反射率较低时,传感器会增加激光功率,以确保足够的光线能够被目标物反射回传感器进行接收。这样可以强化接收信号的强度,提高传感器的灵敏度和测量精度。
24、不仅如此,在计算位移值,利用adaboost算法对测距后的值进行残差补偿,通过补偿模型的计算补偿,能够整个测距方法的位移精度可以做到0.1mm,实现了对测量误差的精准补偿。
技术特征:1.一种基于背景抑制的三角位移测距方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于背景抑制的三角位移测距方法,其特征在于:
3.根据权利要求1所述的基于背景抑制的三角位移测距方法,其特征在于:
4.根据权利要求1所述的基于背景抑制的三角位移测距方法,其特征在于:
5.根据权利要求4所述的基于背景抑制的三角位移测距方法,其特征在于:
6.根据权利要求1所述的基于背景抑制的三角位移测距方法,其特征在于:
7.根据权利要求1所述的基于背景抑制的三角位移测距方法,其特征在于:
技术总结本发明提供了一种基于背景抑制的三角位移测距方法,该基于背景抑制的三角位移测距方法包括以下步骤:步骤一:利用退火算法对光学透镜的参数进行设计,得到光学透镜的设计参数;步骤二:基于光学透镜的设计参数,通过预设的功率值对光学透镜的功率值进行补偿;步骤三:利用补偿后的光学透镜,通过三角位移测距法进行测距,得到测距结果;步骤四:利用Adaboost算法对测距结果进行残差补偿,得到补偿后的测距结果。基于该测距方法,在设计光学透镜参数时,不再依赖设计经验和历史测试数据,经过模拟退火对光学参数进行自动优化,减少了设计的盲目性,降低了根据实验结合经验法来获得光学参数的误差,缩短了光学透镜的设计周期。技术研发人员:宋益盛,陈坤速,柯达受保护的技术使用者:上海索迪龙自动化股份有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/331567.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。