基于情绪模式的异构无人集群协同任务分配与路径规划方法
- 国知局
- 2024-11-21 11:58:24
本发明涉及雷达信号处理技术,具体涉及一种基于情绪模式的异构无人集群协同任务分配与路径规划方法。
背景技术:
1、异构无人集群由多种不同类型的无人机组成,可以适应不同环境和任务需求,利用信息交互与反馈、激励与响应,实现相互间行为协同,完成更加复杂和高效的飞行任务,与同构无人集群相比,可以显著提高系统性能,降低集成和维护成本。
2、无人机任务分配方法的实际性能在很大程度上取决于与之相关的路径规划过程,但现有的大多数研究,并未考虑任务分配和路径规划二者之间的耦合性。这种处理方式虽然降低了求解问题的复杂度,但面对日益严峻的任务环境也显现出其弊端。另外,针对复杂多任务场景中无人集群适应性弱、鲁棒性低、灵活性小、通信负载大和资源利用率低等问题,以自组织的方式建立起来的异构无人集群网络节点可以自由地加入和离开,能够自动调整拓扑,无需中心节点的管理和介入,可以灵活调用闲置的计算能力或存储能力。综上所述,现有技术中尚未有基于情绪模式的异构无人集群协同任务分配与路径规划方法。
技术实现思路
1、发明目的:本发明的目的是提供一种基于情绪模式的异构无人集群协同任务分配与路径规划方法,实现了较优的异构无人集群协同任务分配与路径规划,有效地提升了异构无人集群的净收益。
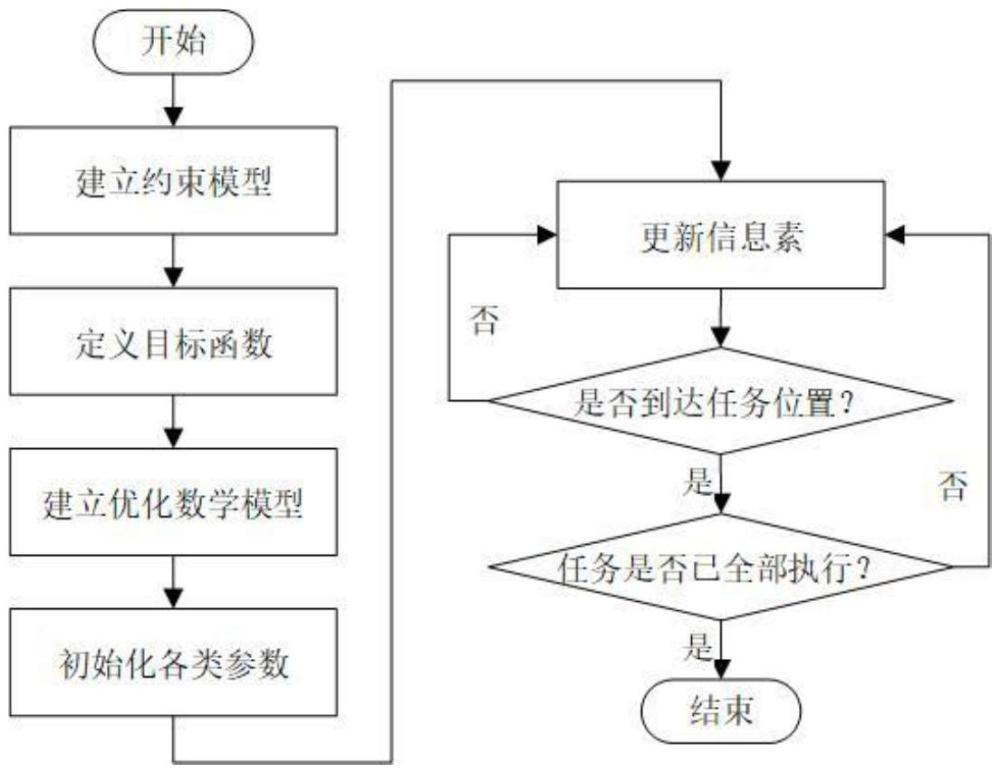
2、技术方案:本发明的基于情绪模式的异构无人集群协同任务分配与路径规划方法,包括以下步骤:
3、(1)建立异构无人集群约束模型,包括异构无人集群航程约束、任务需求约束、航迹安全约束和载荷约束;
4、(2)构造基于情绪模式的异构无人集群协同任务分配与路径规划方法目标函数,以此作为协同任务分配与路径规划效果的衡量指标;
5、(3)以异构无人集群航程、任务需求、航迹安全和任务载荷为约束条件,以最大化异构无人集群净收益为优化目标,建立基于情绪模式的异构无人集群协同任务分配与路径规划优化数学模型;
6、(4)采用蚁群算法,引入轮盘赌选择原则和精英策略对基于情绪模式的异构无人集群协同任务分配与路径规划优化数学模型进行求解。
7、进一步的,异构无人集群航程约束表示为:
8、
9、其中,表示无人机ui从起点到任务tia的距离;表示无人机ui从tia的前序任务到任务tia的距离;lmax,i表示无人机ui燃油耗尽时的航程;a表示无人机ui分配到的任务总数;
10、异构无人集群任务需求约束表示为:
11、
12、其中,xij表示任务决策变量;n表示异构无人集群中无人机总数;
13、异构无人集群航迹安全约束表示为:
14、①针对雷达等有源威胁区的威胁概率:
15、
16、②针对高山等固定障碍物威胁区的威胁概率:
17、
18、其中,表示无人机ui受威胁源威胁概率;表示无人机ui与威胁源中心之间的距离;db表示威胁源的最大威胁半径;表示威胁源的威胁程度;表示无人机ui被摧毁的临界值;
19、异构无人集群载荷约束表示为:
20、
21、其中,表示无人机ui执行任务tia所耗费的载荷资源;bmax,i表示无人机ui携带的总任务载荷资源。
22、进一步的,基于情绪模式的异构无人集群协同任务分配与路径规划方法目标函数表示为:
23、uu=μ1eu-μ2cu+dij
24、其中,uu表示异构无人集群的净收益;μ1、μ2为权值系数,且μ1+μ2=1;eu表示异构无人集群的理想收益;cu表示异构无人集群执行任务的代价;dij表示异构无人集群中无人机ui执行任务tj的收益调整函数。
25、进一步的,异构无人集群的理想收益eu的表达式为:
26、
27、其中,n表示异构无人集群中无人机总数;ei表示异构无人集群中无人机ui对任务打击的理想收益,表达式为:
28、
29、其中,a表示无人机ui分配到的任务总数;v_targeta表示任务tia价值;pia表示无人机ui摧毁任务tia概率。
30、进一步的,异构无人集群执行任务的代价cu的表达式为:
31、
32、其中,n表示异构无人集群中无人机总数;ci表示异构无人集群中无人机ui的任务代价,表达式为:
33、
34、其中,v_uavi表示无人机ui自身价值;表示任务tia摧毁无人机ui的概率;表示任务tia对无人机ui的威胁程度;λ1、λ2、λ3为权值系数;a表示无人机ui分配到的任务总数。
35、进一步的,异构无人集群中无人机ui执行任务tj的收益调整函数dij的表达式为:
36、
37、其中,eij表示无人机ui执行任务tj的收益函数;γ为偏好系数;emin表示无人机最小理想收益,emax表示无人机最大理想收益,ed=emax-emin。
38、进一步的,基于情绪模式的异构无人集群协同任务分配与路径规划优化数学模型的表达式为:
39、
40、其中,uu表示异构无人集群的净收益;μ1、μ2为权值系数;eu表示异构无人集群的理想收益;cu表示异构无人集群执行任务的代价;dij表示异构无人集群中无人机ui执行任务tj的收益调整函数;表示无人机ui从起点到任务tia的距离;表示无人机ui从tia的前序任务到任务tia的距离;lmax,i表示无人机ui燃油耗尽时的航程;xij表示任务决策变量;表示无人机ui受威胁源威胁概率;表示无人机ui被摧毁的临界值;表示无人机ui执行任务tia所耗费的载荷资源;bmax,i表示无人机ui携带的总任务载荷资源;n表示异构无人集群中无人机总数;a表示无人机ui分配到的任务总数。
41、进一步的,步骤(4)中设个体表示为xi,i=1,2,...,ant,ant表示群体大小,则其适应度值为f(xi),群体中每个个体的被选择概率p(xi)为:
42、
43、由p(x1)+p(x2)+...+p(xant)=1组成一个轮盘,计算每个个体的累积概率qi:
44、
45、根据累积概率,在[0,1]区间内用rand()产生一个均匀分布的伪随机数r,若r落在概率区间qk-1<r≤qk,则选择个体xk。
46、进一步的,步骤(4)中精英策略中信息素调整参数为:
47、
48、其中,表示精英蚂蚁引起节点m与n之间的信息素增量;tbest表示组成最优路径的节点集;lbest表示截至目前找到的最优解的路径长度;q表示信息素增强系数;e表示调整参数,与精英路径的长度有关。
49、上述方法对应的系统,包括:
50、约束模型构建单元,用于建立异构无人集群约束模型,包括异构无人集群航程约束、任务需求约束、航迹安全约束和载荷约束;
51、目标函数构建单元,用于构造基于情绪模式的异构无人集群协同任务分配与路径规划方法目标函数,以此作为协同任务分配与路径规划效果的衡量指标;
52、模型构建单元,用于以异构无人集群航程、任务需求、航迹安全和任务载荷为约束条件,以最大化异构无人集群净收益为优化目标,建立基于情绪模式的异构无人集群协同任务分配与路径规划优化数学模型;
53、模型求解单元,用于采用蚁群算法,引入轮盘赌选择原则和精英策略对基于情绪模式的异构无人集群协同任务分配与路径规划优化数学模型进行求解。
54、有益效果:与现有技术相比,本发明的优点为:(1)通过对多任务场景中异构无人集群航程、价值收益和受威胁程度等参数进行联合优化,在满足航程、任务需求、航迹安全和任务载荷的约束条件下,考虑异构无人集群的情绪,最大限度地提升异构无人集群净收益;(2)实现了较优的异构无人集群协同任务分配与路径规划,有效地提升了异构无人集群的净收益。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333643.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。