基于改进YOLOv5s的高频雷达时频域船舶目标检测方法及系统
- 国知局
- 2024-11-21 12:00:51
本发明涉及船舶目标检测领域,具体涉及一种基于改进yolov5s的高频雷达时频域船舶目标检测方法及系统。
背景技术:
1、高频雷达系统可实现对大范围海域全天时、全天候的持续监测,是海洋环境动态监测的重要技术手段。在使用此类系统进行船舶目标检测的过程中,由于船舶散射截面的起伏以及行驶速度的波动,船舶目标的回波常呈现出多普勒与能量的非平稳特性。在此情形下,使用传统的恒虚警检测算法进行船舶目标检测,难以获得理想的检测效果。
2、由于时频分析方法可捕捉非平稳信号时变特性的优势,许多学者致力于研究时频域船舶目标检测的方法,以提高高频雷达系统的目标检测性能。高频雷达时频域检测方法的核心思想是将传统距离-多普勒谱中点目标检测任务转换成时频谱中的脊线提取任务,一般使用边缘跟踪算法结合能量判定的方式设计。但此类方法需要结合人工经验设置大量的参数以实现对检测过程的控制,在高频段噪底多变的情形下,方法的自适应检测性能欠佳。
技术实现思路
1、为克服上述现有技术的不足,本发明提供一种基于改进yolov5s的高频雷达时频域船舶目标检测方法及系统,通过改进yolov5s模型,将高频雷达船舶目标能量检测任务转换成了图像处理中的目标检测任务,实现了检测效果好、特征提取能力强且操作方便的技术效果。
2、根据本发明说明书的一方面,提供一种基于改进yolov5s的高频雷达时频域船舶目标检测方法,包括:
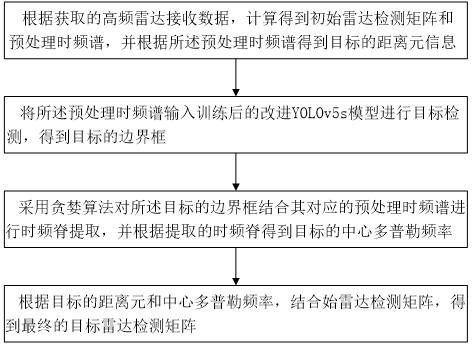
3、根据获取的高频雷达接收数据,计算得到初始雷达检测矩阵和预处理时频谱,并根据所述预处理时频谱得到目标的距离元信息;
4、将所述预处理时频谱输入训练后的改进yolov5s模型进行目标检测,得到目标的边界框;
5、采用贪婪算法对所述目标的边界框结合其对应的预处理时频谱进行时频脊提取,并根据提取的时频脊得到目标的中心多普勒频率;
6、根据目标的距离元和中心多普勒频率,结合始雷达检测矩阵,得到最终的目标雷达检测矩阵;
7、其中,所述改进yolov5s模型的训练,包括:
8、构建预处理时频谱的训练集;
9、利用动态蛇形卷积模块和三重注意力机制模块对yolov5s的瓶颈结构进行优化,构建改进yolov5s模型;
10、利用预处理时频谱的训练集对所述改进yolov5s模型进行训练,得到训练好的改进yolov5s模型。
11、作为进一步的技术方案,在获取高频雷达接收数据后,还包括:
12、根据获取的高频雷达接收数据,获取高频雷达距离-慢时间谱;
13、根据所述高频雷达距离-慢时间谱,分别计算得到距离-多普勒谱及各距离元的时频谱;
14、根据所述距离-多普勒谱的维度,生成同样维度大小的初始雷达检测矩阵。
15、作为进一步的技术方案,构建预处理时频谱的训练集,包括:
16、根据所述距离-多普勒谱,分别计算得到一阶谱区多普勒范围和地杂波多普勒范围;
17、对所述时频谱内一阶谱区和地杂波多普勒的区域进行置0;
18、对置0操作后的时频谱进行归一化处理,得到预处理时频谱。
19、作为进一步的技术方案,所述方法还包括:根据预设比例将所述预处理时频谱划分为预处理时频谱的训练集和测试集。
20、作为进一步的技术方案,所述方法还包括:
21、根据目标的接收数据场次信息,确定初始雷达检测矩阵;
22、根据目标的距离元信息、中心多普勒频率,将所述初始雷达检测矩阵中对应元素置1;
23、采用聚合的方式,对所述初始雷达检测矩阵中的检测结果进行合并,得到最终的雷达检测矩阵。
24、作为进一步的技术方案,所述方法还包括:在预设时间或者预设数量的接收场次后,利用新的预处理时频谱训练集对构建的改进yolov5s模型进行再次训练,得到新的预训练权重。
25、根据本发明说明书的一方面,提供一种基于改进yolov5s的高频雷达时频域船舶目标检测系统,包括:
26、第一主模块,用于根据获取的高频雷达接收数据,计算得到初始雷达检测矩阵和预处理时频谱,并根据所述预处理时频谱得到目标的距离元信息;
27、第二主模块,用于将所述预处理时频谱输入训练后的改进yolov5s模型进行目标检测,得到目标的边界框;
28、第三主模块,用于采用贪婪算法对所述目标的边界框结合其对应的预处理时频谱进行时频脊提取,并根据提取的时频脊得到目标的中心多普勒频率;
29、第四主模块,用于根据目标的距离元和中心多普勒频率,结合初始雷达检测矩阵,得到最终的目标雷达检测矩阵;
30、其中,所述改进yolov5s模型的训练,包括:
31、构建预处理时频谱的训练集;
32、利用动态蛇形卷积模块和三重注意力机制模块对yolov5s的瓶颈结构进行优化,构建改进yolov5s模型;
33、利用预处理时频谱的训练集对所述改进yolov5s模型进行训练,得到预训练权重,完成改进yolov5s模型的训练。
34、作为进一步的技术方案,还包括:第五主模块,用于在预设时间或者预设数量的接收场次后,利用新的预处理时频谱训练集对构建的改进yolov5s模型进行再次训练,得到新的预训练权重。
35、根据本发明说明书的一方面,提供一种电子设备,包括:至少一个处理器、至少一个存储器和通信接口;其中,所述处理器、存储器和通信接口相互间进行通信;所述存储器存储有被所述处理器执行的程序指令,所述处理器调用所述程序指令,以执行所述的方法。
36、根据本发明说明书的一方面,提供一种非暂态计算机读存储介质,所述非暂态计算机读存储介质存储计算机指令,所述计算机指令使所述计算机执行所述的方法。
37、本发明针对高频雷达中船舶目标回波的非平稳特性,利用时频域可捕捉时变信号的分析优势,将高频雷达船舶目标能量检测任务转换成了图像处理中的目标检测任务,相对于现有技术而言,具有如下优势:
38、检测效果好,通过在训练集中标注跨多普勒元、幅度时变的船舶目标时频脊线样本,可实现对强目标、弱目标、非平稳目标的自适应检测;
39、特征提取能力强,通过引入动态蛇形卷积和三重注意力机制模块,改进的yolov5s网络在提取时频脊线方面的能力得到了显著提升;
40、操作简便,由于深度学习网络是端对端的目标检测模型,仅需要设置合理的置信度阈值即可实现对目标检测任务的控制,有利于提升高频雷达船舶目标检测性能。
技术特征:1.基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,包括:
2.根据权利要求1所述基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,在获取高频雷达接收数据后,还包括:
3.根据权利要求2所述基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,构建预处理时频谱的训练集,包括:
4.根据权利要求3所述基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,所述方法还包括:根据预设比例将所述预处理时频谱划分为预处理时频谱的训练集和测试集。
5.根据权利要求1所述基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,所述方法还包括:
6.根据权利要求1所述基于改进yolov5s的高频雷达时频域船舶目标检测方法,其特征在于,所述方法还包括:在预设时间或者预设数量的接收场次后,利用新的预处理时频谱训练集对构建的改进yolov5s模型进行再次训练,得到新的预训练权重。
7.基于改进yolov5s的高频雷达时频域船舶目标检测系统,其特征在于,包括:
8.根据权利要求7所述基于改进yolov5s的高频雷达时频域船舶目标检测系统,其特征在于,还包括:第五主模块,用于在预设时间或者预设数量的接收场次后,利用新的预处理时频谱训练集对构建的改进yolov5s模型进行再次训练,得到新的预训练权重。
9.一种电子设备,其特征在于,包括:至少一个处理器、至少一个存储器和通信接口;其中,所述处理器、存储器和通信接口相互间进行通信;所述存储器存储有被所述处理器执行的程序指令,所述处理器调用所述程序指令,以执行权利要求1至6任一项权利要求所述的方法。
10.一种非暂态计算机读存储介质,其特征在于,所述非暂态计算机读存储介质存储计算机指令,所述计算机指令使所述计算机执行权利要求1至6中任一项权利要求所述的方法。
技术总结本发明公开一种基于改进YOLOv5s的高频雷达时频域船舶目标检测方法及系统,方法包括:根据获取的高频雷达接收数据,计算得到初始雷达检测矩阵和预处理时频谱,并根据所述预处理时频谱得到目标的距离元信息;将所述预处理时频谱输入训练后的改进YOLOv5s模型进行目标检测,得到目标的边界框;采用贪婪算法对所述目标的边界框结合其对应的预处理时频谱进行时频脊提取,并根据提取的时频脊得到目标的中心多普勒频率;根据目标的距离元和中心多普勒频率,结合始雷达检测矩阵,得到最终的目标雷达检测矩阵。本发明可以在保证方法易用性的同时,提升高频雷达对船舶目标的检测性能。技术研发人员:周浩,黄达受保护的技术使用者:武汉大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333847.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表