一种基于机器学习的路面湿滑状态检测方法、系统及平台与流程
- 国知局
- 2024-11-21 12:02:59
本发明属于路面湿滑状态检测处理,具体涉及一种基于机器学习的路面湿滑状态检测方法、系统及平台。
背景技术:
1、现目前,多车道高速公路路面排水路径长,特别是超高渐变段、合成纵坡较小等排水困难路段极易造成路面排水不畅,当路表被水膜覆盖时,由于水膜在轮胎-路面界面处的润滑作用,轮胎与路面的附着系数显著降低,导致车辆的刹车距离增加、行驶稳定性下降,甚至还可能会出现滑水现象,严重影响行车安全,基于上述原因,对于路面湿滑状态检测显的尤为重要。
2、传统湿滑路面检测方法主要依赖于单一传感器(如摄像头或激光雷达)的数据,来源单一,导致检测精度低;且在不同环境条件(如光线变化、天气变化)下表现不稳定,鲁棒性差;对于复杂路段(如超高渐变段、合成纵坡较小段)检测效果不佳。
3、因此,针对以上传统方法对路面湿滑状态检测的精度低,鲁棒性差的技术问题缺陷,急需设计和开发一种基于机器学习的路面湿滑状态检测方法、系统及平台。
技术实现思路
1、为克服上述现有技术存在的不足及困难,本发明之目的在于,针对路面湿滑状态检测的精度低,鲁棒性差的技术问题缺陷,而提供一种基于机器学习的路面湿滑状态检测方法、系统、平台及存储介质,以提高湿滑路面检测的精度和鲁棒性。
2、本发明的第一目的在于提供一种基于机器学习的路面湿滑状态检测方法;本发明的第二目的在于提供一种基于机器学习的路面湿滑状态检测系统;本发明的第三目的在于提供一种基于机器学习的路面湿滑状态检测平台;本发明的第四目的在于提供一种计算机可读取存储介质。
3、本发明的第一目的是这样实现的:所述方法包括如下步骤:
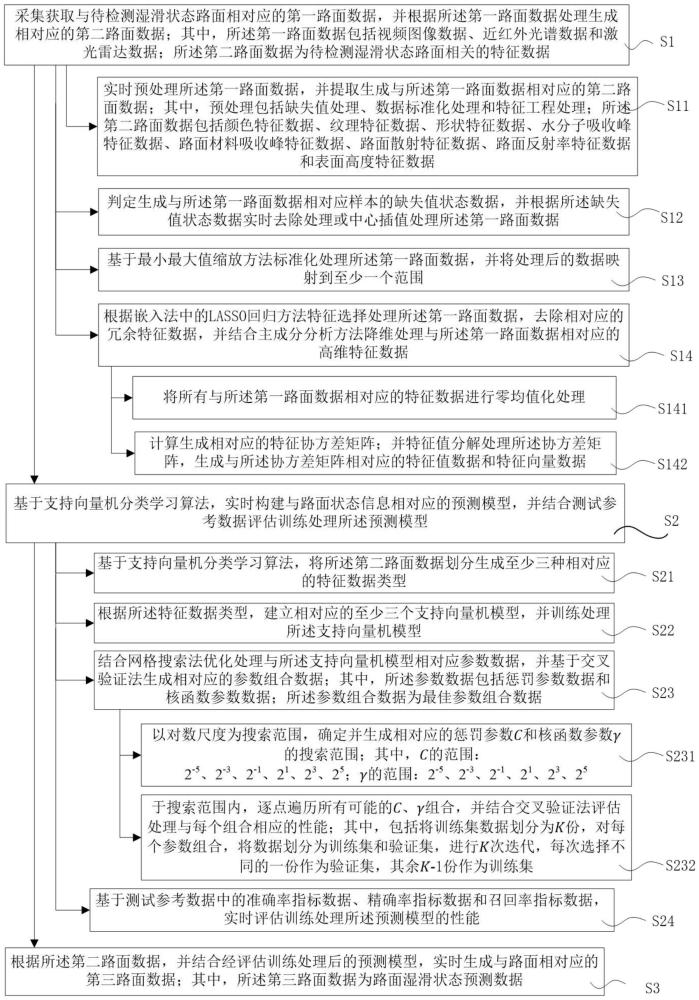
4、采集获取与待检测湿滑状态路面相对应的第一路面数据,并根据所述第一路面数据处理生成相对应的第二路面数据;其中,所述第一路面数据包括视频图像数据、近红外光谱数据和激光雷达数据;所述第二路面数据为待检测湿滑状态路面相关的特征数据;
5、基于支持向量机分类学习算法,实时构建与路面状态信息相对应的预测模型,并结合测试参考数据评估训练处理所述预测模型;
6、根据所述第二路面数据,并结合经评估训练处理后的预测模型,实时生成与路面相对应的第三路面数据;其中,所述第三路面数据为路面湿滑状态预测数据。
7、进一步地,所述采集获取与待检测湿滑状态路面相对应的第一路面数据,并根据所述第一路面数据处理生成相对应的第二路面数据,还包括:
8、实时预处理所述第一路面数据,并提取生成与所述第一路面数据相对应的第二路面数据;其中,预处理包括缺失值处理、数据标准化处理和特征工程处理;所述第二路面数据包括颜色特征数据、纹理特征数据、形状特征数据、水分子吸收峰特征数据、路面材料吸收峰特征数据、路面散射特征数据、路面反射率特征数据和表面高度特征数据。
9、进一步地,所述采集获取与待检测湿滑状态路面相对应的第一路面数据,并根据所述第一路面数据处理生成相对应的第二路面数据,还包括:
10、判定生成与所述第一路面数据相对应样本的缺失值状态数据,并根据所述缺失值状态数据实时去除处理或中心插值处理所述第一路面数据;
11、基于最小最大值缩放方法标准化处理所述第一路面数据,并将处理后的数据映射到至少一个范围;
12、根据嵌入法中的lasso回归方法特征选择处理所述第一路面数据,去除相对应的冗余特征数据,并结合主成分分析方法降维处理与所述第一路面数据相对应的高维特征数据。
13、进一步地,所述结合主成分分析方法降维处理与所述第一路面数据相对应的高维特征数据,还包括:
14、将所有与所述第一路面数据相对应的特征数据进行零均值化处理;
15、计算生成相对应的特征协方差矩阵;并特征值分解处理所述协方差矩阵,生成与所述协方差矩阵相对应的特征值数据和特征向量数据;其中,计算生成相对应的特征协方差矩阵的公式为:
16、
17、其中,xi为数据中的每个特征,为均值,t为中心化特征向量的转置;n为样本数量。
18、进一步地,所述基于支持向量机分类学习算法,实时构建与路面状态信息相对应的预测模型,并结合测试参考数据评估训练处理所述预测模型,还包括:
19、基于支持向量机分类学习算法,将所述第二路面数据划分生成至少三种相对应的特征数据类型;
20、根据所述特征数据类型,建立相对应的至少三个支持向量机模型,并训练处理所述支持向量机模型;
21、结合网格搜索法优化处理与所述支持向量机模型相对应参数数据,并基于交叉验证法生成相对应的参数组合数据;其中,所述参数数据包括惩罚参数数据和核函数参数数据;所述参数组合数据为最佳参数组合数据;
22、基于测试参考数据中的准确率指标数据、精确率指标数据和召回率指标数据,实时评估训练处理所述预测模型的性能。
23、进一步地,所述结合网格搜索法优化处理与所述支持向量机模型相对应参数数据,并基于交叉验证法生成相对应的参数组合数据,还包括:
24、以对数尺度为搜索范围,确定并生成相对应的惩罚参数c和核函数参数γ的搜索范围;其中,c的范围:2-5、2-3、2-1、21、23、25;γ的范围:2-5、2-3、2-1、21、23、25;
25、于搜索范围内,逐点遍历所有可能的c、γ组合,并结合交叉验证法评估处理与每个组合相应的性能;其中,包括将训练集数据划分为k份,对每个参数组合,将数据划分为训练集和验证集,进行k次迭代,每次选择不同的一份作为验证集,其余k-1份作为训练集。
26、本发明的第二目的是这样实现的:所述系统应用于所述基于机器学习的路面湿滑状态检测方法,所述系统包括:
27、数据获取处理单元,用于采集获取与待检测湿滑状态路面相对应的第一路面数据,并根据所述第一路面数据处理生成相对应的第二路面数据;其中,所述第一路面数据包括视频图像数据、近红外光谱数据和激光雷达数据;所述第二路面数据为待检测湿滑状态路面相关的特征数据;
28、预测模型构建单元,用于基于支持向量机分类学习算法,实时构建与路面状态信息相对应的预测模型,并结合测试参考数据评估训练处理所述预测模型;
29、预测数据生成单元,用于根据所述第二路面数据,并结合经评估训练处理后的预测模型,实时生成与路面相对应的第三路面数据;其中,所述第三路面数据为路面湿滑状态预测数据。
30、进一步地,所述数据获取处理单元,还包括:
31、第一数据生成模块,用于实时预处理所述第一路面数据,并提取生成与所述第一路面数据相对应的第二路面数据;其中,预处理包括缺失值处理、数据标准化处理和特征工程处理;所述第二路面数据包括颜色特征数据、纹理特征数据、形状特征数据、水分子吸收峰特征数据、路面材料吸收峰特征数据、路面散射特征数据、路面反射率特征数据和表面高度特征数据;
32、和/或,所述数据获取处理单元,还包括:
33、第一数据判定模块,用于判定生成与所述第一路面数据相对应样本的缺失值状态数据,并根据所述缺失值状态数据实时去除处理或中心插值处理所述第一路面数据;
34、第一数据处理模块,用于基于最小最大值缩放方法标准化处理所述第一路面数据,并将处理后的数据映射到至少一个范围;
35、第二数据处理模块,用于根据嵌入法中的lasso回归方法特征选择处理所述第一路面数据,去除相对应的冗余特征数据,并结合主成分分析方法降维处理与所述第一路面数据相对应的高维特征数据;
36、和/或,所述第二数据处理模块,还包括:
37、第三数据处理模块,用于将所有与所述第一路面数据相对应的特征数据进行零均值化处理;
38、第一计算生成模块,用于计算生成相对应的特征协方差矩阵;并特征值分解处理所述协方差矩阵,生成与所述协方差矩阵相对应的特征值数据和特征向量数据;其中,计算生成相对应的特征协方差矩阵的公式为:
39、
40、其中,xi为数据中的每个特征,为均值,t为中心化特征向量的转置;n为样本数量;
41、和/或,所述预测模型构建单元,还包括:
42、第二数据生成模块,用于基于支持向量机分类学习算法,将所述第二路面数据划分生成至少三种相对应的特征数据类型;
43、第四数据处理模块,用于根据所述特征数据类型,建立相对应的至少三个支持向量机模型,并训练处理所述支持向量机模型;
44、第三数据生成模块,用于结合网格搜索法优化处理与所述支持向量机模型相对应参数数据,并基于交叉验证法生成相对应的参数组合数据;其中,所述参数数据包括惩罚参数数据和核函数参数数据;所述参数组合数据为最佳参数组合数据;
45、第五数据处理模块,用于基于测试参考数据中的准确率指标数据、精确率指标数据和召回率指标数据,实时评估训练处理所述预测模型的性能;
46、和/或,所述第三数据生成模块,还包括:
47、第四数据生成模块,用于以对数尺度为搜索范围,确定并生成相对应的惩罚参数c和核函数参数γ的搜索范围;其中,c的范围:2-5、2-3、2-1、21、23、25;γ的范围:2-5、2-3、2-1、21、23、25;
48、第六数据处理模块,用于于搜索范围内,逐点遍历所有可能的c、γ组合,并结合交叉验证法评估处理与每个组合相应的性能;其中,包括将训练集数据划分为k份,对每个参数组合,将数据划分为训练集和验证集,进行k次迭代,每次选择不同的一份作为验证集,其余k-1份作为训练集。
49、本发明的第三目的是这样实现的:包括处理器、存储器以及基于机器学习的路面湿滑状态检测平台控制程序;其中在所述的处理器执行所述的基于机器学习的路面湿滑状态检测平台控制程序,所述的基于机器学习的路面湿滑状态检测平台控制程序被存储在所述存储器中,所述的基于机器学习的路面湿滑状态检测平台控制程序,实现所述的基于机器学习的路面湿滑状态检测方法。
50、本发明的第四目的是这样实现的:所述计算机可读取存储介质存储有基于机器学习的路面湿滑状态检测平台控制程序,所述的基于机器学习的路面湿滑状态检测平台控制程序,实现所述的基于机器学习的路面湿滑状态检测方法。
51、本发明通过方法采集获取与待检测湿滑状态路面相对应的第一路面数据,并根据所述第一路面数据处理生成相对应的第二路面数据;其中,所述第一路面数据包括视频图像数据、近红外光谱数据和激光雷达数据;所述第二路面数据为待检测湿滑状态路面相关的特征数据;基于支持向量机分类学习算法,实时构建与路面状态信息相对应的预测模型,并结合测试参考数据评估训练处理所述预测模型;根据所述第二路面数据,并结合经评估训练处理后的预测模型,实时生成与路面相对应的第三路面数据;其中,所述第三路面数据为路面湿滑状态预测数据,以及与方法相应的系统、平台及存储介质,可以提高湿滑路面检测的精度和鲁棒性。
52、本发明方案结合了相机、近红外光谱仪和激光雷达的多源数据,通过多视图学习方法提取多维特征(颜色、纹理、形状、水分子吸收峰、路面材料吸收峰、路面反射率等),大幅提升了检测精度;通过使用近红外光谱和激光雷达,这些传感器对光线变化和天气条件不敏感,结合svm分类算法,使得系统在各种环境条件下具有较高的鲁棒性;通过激光雷达数据提取路面几何特征(如表面高度、曲率),结合多源数据分析,提高了系统在复杂路段的适应性和检测效果。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334015.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表