一种六轴光纤惯导系统的陀螺零位序贯可观测性分析方法
- 国知局
- 2024-11-21 12:06:59
本发明涉及惯性导航,具体涉及一种六轴光纤惯导系统的陀螺零位序贯可观测性分析方法。
背景技术:
1、惯性导航系统包含平台式惯性导航系统和捷联式惯性导航系统,由于其具有抗干扰能力强、高自主性等特点,在军事和民用等多个领域有着广泛的应用。近十年,在弹载领域应用的惯导系统主要向着高性能、高可靠的方向发展。但是弹载上的惯性导航系统使用频率低,在几十年贮存期间,捷联惯性导航系统内部的惯性测量单元参数受到环境等外部因素的影响会发生变化,进而会导致导航性能劣化。“导航级”惯导在静基座环境中,加速度计造成的导航误差远远小于光纤陀螺。对系统内部的参数进行估计和补偿,即对系统进行标定,是保证弹载捷联惯导系统性能的一项重要工作。
2、对系统进行标定前,需要对六轴弹载惯导系统的陀螺零位进行可观测性分析。然而弹载惯导系统在洞库贮存期间难以实现机动,即不存在运动激励,因此只能在静基座下对捷联光纤惯导系统的陀螺零位误差进行可观测性分析。由于传统的三轴捷联惯导系统在静基座下只有北向陀螺的零位误差可观测,而东向和天向陀螺的零位误差不可观测,导致无法实现所有零位误差的估计和补偿。因此,为了实现静基座下陀螺零位误差的估计和补偿,亟需一种适用于斜置六轴捷联光纤惯导系统陀螺零位误差的可观测性分析方法。
技术实现思路
1、鉴于上述问题,本发明提供了一种六轴光纤惯导系统的陀螺零位序贯可观测性分析方法,解决了现有技术中难以对静基座下光纤陀螺零位误差进行可观测性判定的技术问题。
2、本发明提供了一种六轴光纤惯导系统的陀螺零位序贯可观测性分析方法,包括以下步骤:
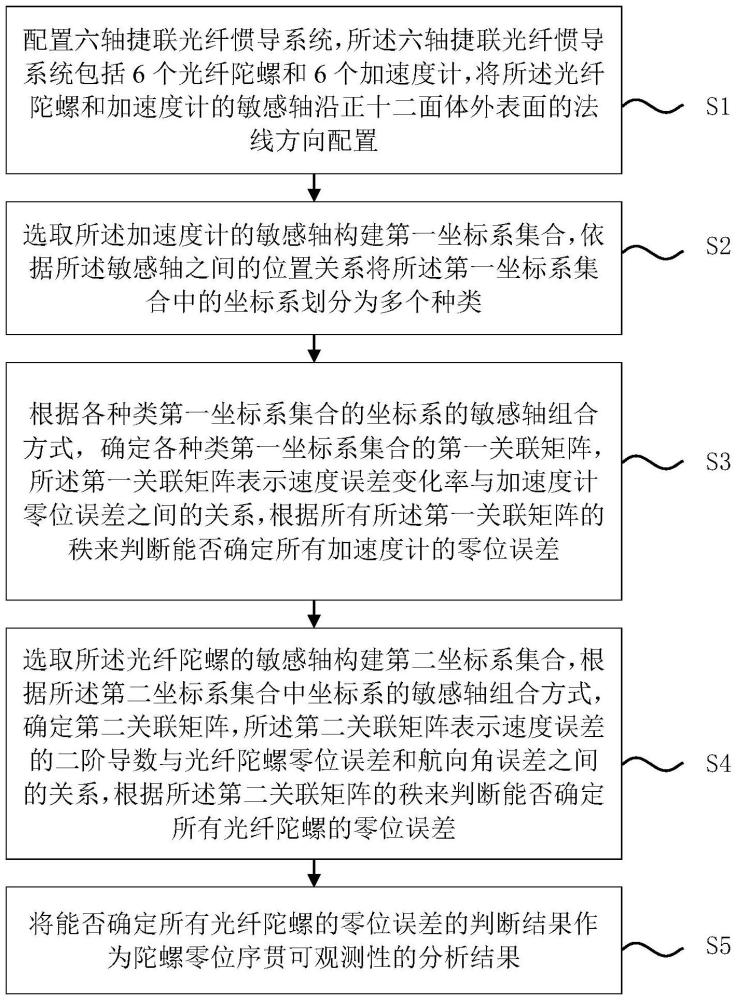
3、步骤s1、配置六轴捷联光纤惯导系统,所述六轴捷联光纤惯导系统包括6个光纤陀螺和6个加速度计,将所述光纤陀螺和加速度计的敏感轴沿正十二面体外表面的法线方向配置;
4、步骤s2、选取所述加速度计的敏感轴构建第一坐标系集合,依据所述敏感轴之间的位置关系将所述第一坐标系集合划分为多个种类;
5、步骤s3、根据所述多个种类中各种类的坐标系的敏感轴组合方式,确定各种类的第一关联矩阵,所述第一关联矩阵表示速度误差变化率与加速度计零位误差之间的关系,根据所有所述第一关联矩阵的秩来判断能否确定所有加速度计的零位误差;
6、步骤s4、选取所述光纤陀螺的敏感轴构建第二坐标系集合,根据所述第二坐标系集合中坐标系的敏感轴组合方式,确定第二关联矩阵,所述第二关联矩阵表示速度误差的二阶导数与光纤陀螺零位误差和航向角误差之间的关系,根据所述第二关联矩阵的秩来判断能否确定所有光纤陀螺的零位误差;
7、步骤s5、将能否确定所有光纤陀螺的零位误差的判断结果作为陀螺零位序贯可观测性的分析结果。
8、优选地,步骤s1具体包括:
9、对惯导系统建立虚拟正交坐标系o-xyz,其中x轴方向为东向,y轴方向为北向,z轴方向为朝天向,p1、p2和p3分别为xoz、xoy、yoz平面;
10、将一个光纤陀螺和一个加速度计设为一组传感器,将各组传感器的敏感轴a,b,c,d,e,f分别沿正十二面体外表面相邻平面的法线方向配置,其中a和b敏感轴位于平面p1,c和d敏感轴位于平面p2,e和f敏感轴位于平面p3,每个平面内的敏感轴与本体系轴之间形成一个固定的空间角α,α=31°43′2.9″。
11、优选地,步骤s2具体包括:
12、步骤s2-1、从敏感轴a~f中任选3个敏感轴构建虚拟正交坐标系,共形成二十种坐标系,作为第一坐标系集合;
13、步骤s2-2、根据所选传感器敏感轴与z轴的关系,并根据所选传感器敏感轴是否共面,将所述第一坐标系集合分为四个种类。
14、优选地,步骤s2-2具体包括,将所述第一坐标系集合中的二十种坐标系分为以下四个种类:
15、t1、没有相互共面的敏感轴,p1、p2和p3平面中各存在一个敏感轴,共构建八种坐标系,分别为:ace、acf、ade、adf、bce、bcf、bde、bdf;
16、t2、具有相互共面的敏感轴,且所述相互共面的敏感轴在朝天轴有相同分量,共构建四种坐标系,分别为:abc、abd、abe和abf;
17、t3、具有相互共面的敏感轴,且所述相互共面的敏感轴在朝天轴有相反分量,共构建四种坐标系,分别为:aef、bef、cef和def;
18、t4、具有相互共面的敏感轴,且所述相互共面的敏感轴与朝天轴垂直、无分量,共构建四种坐标系,分别为:acd、bcd、cde和cdf。
19、优选地,步骤s3具体包括:
20、步骤s3-1、根据四个种类的坐标系的敏感轴组合方式,确定四个种类的表示速度误差变化率与加速度计零位误差之间的关系的第一关联矩阵
21、步骤s3-2、对所有第一关联矩阵分别求秩;根据的秩来判断能否确定所有加速度计的零位误差;
22、步骤s3-3、若能够确定所有加速度计的零位误差,根据所述加速度计的零位误差确定水平姿态误差。
23、优选地,步骤s3-1中,第一关联矩阵表达式为:
24、
25、
26、
27、
28、其中,表示选取以i,j,k为敏感轴构建虚拟正交坐标系时对应的配置矩阵第k1行、第k2列元素,i,j,k轴为a~f轴中任意不重复的三个轴。
29、优选地,步骤s3-2具体包括:比较的秩的总和与加速度计总数的大小是否相等,若秩的总和等于加速度计总数的大小,则判定能够确定所有加速度计的零位误差,否则判定不能确定所有加速度计的零位误差。
30、优选地,步骤s4具体包括:
31、步骤s4-1、从敏感轴a~f中任选4个敏感轴,从所述4个敏感轴中任选3个敏感轴构建虚拟正交坐标系,共形成4种坐标系,作为第二坐标系集合;
32、步骤s4-2、第二坐标系集合中坐标系的敏感轴组合方式,确定速度误差的二阶导数与光纤陀螺零位误差和所述航向角误差之间的关系的第二关联矩阵
33、步骤s4-3、根据的秩来判断能否确定所有光纤陀螺的零位误差。
34、优选地,步骤s4-2中,第二关联矩阵的表达式为:
35、
36、其中,g为重力加速度,分别为当地地球自转的角速度在虚拟正交坐标系x,y,z轴方向的分量。
37、优选地,步骤s4-3具体包括:比较的秩是否等于8,若的秩等于8,则判定能够确定所有光纤陀螺的零位误差,否则判定不能确定所有光纤陀螺的零位误差。
38、与现有技术相比,本发明至少具有如下有益效果:
39、(1)本发明提供的可观测性分析方法的分析对象为采用正十二面体法向配置的六轴捷联光纤惯导系统,能够在惯导系统贮存期间,借助多坐标系方案构建多组量测信息,在静基座下对惯性传感器零位误差进行可观测性分析。
40、(2)本发明提供的可观测性分析方法能够在静基座的状态下实现水平姿态误差和加速度计零位误差的可观测性分析。
41、(3)本发明提供的可观测性分析方法能够在静基座的状态下实现光纤陀螺零位误差的可观测性分析。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。