一种无人驾驶推土机自动作业监控设备
- 国知局
- 2024-11-25 15:25:12
本技术涉及无人驾驶推土机,具体为一种无人驾驶推土机自动作业监控设备。
背景技术:
1、对于现有公告号为cn206625266u的中国专利文件公开了一种推土机,其提出了在市政工程中常常需要推土机,推土机是一种工程车辆,前方装有大型的金属推土刀,使用时放下推土刀,向前铲削并推送泥、沙及石块等,推土刀位置和角度可以调整。推土机能单独完成挖土、运土和卸土工作,具有操作灵活、转动方便、所需工作面小、行驶速度快等特点。其主要适用于一至三类土的浅挖短运,如场地清理或平整,开挖深度不大的基坑以及回填,推筑高度不大的路基等,由于前端推土刀受力比较复杂并且工作环境恶劣,推土刀受到损坏时通常需要更换,但传统的推土刀在更换时非常麻烦甚至不能更换;其解决方案为通过设置带有滑槽的安装板,将铲刀与安装板通过滑块以及限位轴等部件进行连接,便于铲刀的拆卸与安装,方便更换;且通过滑块沿滑槽的横向移动,实现铲刀相对于安装板的横向移动,从而增大推土范围,提高推土效率。
2、上述方案及现有技术对自动作业的无人驾驶推土机在进行监控周围作业环境时,对于监控设备的安装大多是直接固定与无人驾驶推土机的端面,其连接方式一般是通过螺栓进行固定连接,其使用过程受监控设备的角度影响无法进行多方位全面的观测,不能满足实际使用需求。
3、为此,本实用新型提出一种无人驾驶推土机自动作业监控设备用于解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种无人驾驶推土机自动作业监控设备,以解决上述背景技术中提出的问题。
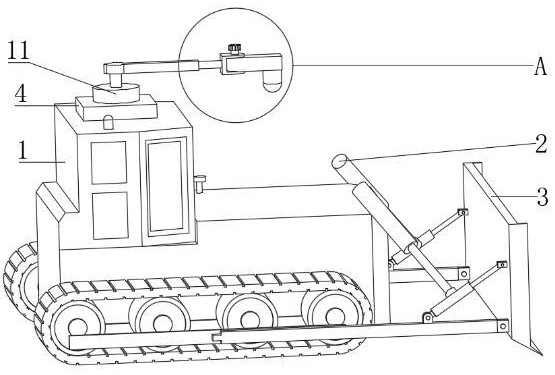
2、为实现上述目的,本实用新型提供如下技术方案:一种无人驾驶推土机自动作业监控设备,包括机体、控制臂和调控辅助组件,所述机体的前端设置有控制臂,且控制臂上设置有铲刀,调控辅助组件设置在机体上,且警示灯固定设置在机体的一端,设置的调控辅助组件对无人机驾驶推土机自动作业的监控设备进行调控作业。
3、优选的,所述调控辅助组件包括固定块、固定槽、第一电机、第一转向轴、第一齿轮、第二齿轮、第二转向轴、圆盘、电动伸缩杆、卡块、活动槽、活动块、定位槽、第二电机、转向杆、摄像头;所述机体的一端固定设置有固定块,且固定块中设置有固定槽,且固定槽中固定设置有第一电机,且第一电机的端面设置有第一转向轴,且第一转向轴上设置有第一齿轮,且固定槽中设置有第二转向轴,且第二转向轴上设置有第二齿轮,且第二转向轴的顶端固定设置有圆盘,且圆盘的端面固定设置有电动伸缩杆,且电动伸缩杆的一端设置有卡块,且卡块一侧设置有活动槽,且活动槽中设置有活动块,且卡块的端面设置有定位槽,且转向杆活动插接设置在定位槽中,且转向杆的端面固定设置有第二电机,且活动块的一端固定设置有摄像头。
4、优选的,所述固定块与固定槽设置位置相对应、设置组数相同。
5、优选的,所述第一齿轮与第二齿轮设置位置相对应、设置组数相同,两者相适配啮合传动。
6、优选的,所述卡块与活动槽、活动块设置位置相对应、设置组数相同,且活动槽与活动块设置尺寸相一致。
7、优选的,所述定位槽与转向杆设置位置相对应、设置组数相同,且定位槽设置为圆形槽。
8、优选的,所述定位槽与卡块、转向杆设置位置相对应、设置组数相同。
9、与现有技术相比,本实用新型的有益效果是:
10、通过在无人驾驶推土机的端面设置调控辅助组件,对于监控设备的固定设置在调控辅助组件上,其使用过程不受监控设备的角度影响可以进行多方位全面的观测,满足实际使用需求。
技术特征:1.一种无人驾驶推土机自动作业监控设备,其特征在于:包括机体(1)、控制臂(2)和调控辅助组件,所述机体(1)的前端设置有控制臂(2),且控制臂(2)上设置有铲刀(3),调控辅助组件设置在机体(1)上,且警示灯(20)固定设置在机体(1)的一端,设置的调控辅助组件对无人机驾驶推土机自动作业的监控设备进行调控作业。
2.根据权利要求1所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述调控辅助组件包括固定块(4)、固定槽(5)、第一电机(6)、第一转向轴(7)、第一齿轮(8)、第二齿轮(9)、第二转向轴(10)、圆盘(11)、电动伸缩杆(12)、卡块(13)、活动槽(14)、活动块(15)、定位槽(16)、第二电机(17)、转向杆(18)、摄像头(19);所述机体(1)的一端固定设置有固定块(4),且固定块(4)中设置有固定槽(5),且固定槽(5)中固定设置有第一电机(6),且第一电机(6)的端面设置有第一转向轴(7),且第一转向轴(7)上设置有第一齿轮(8),且固定槽(5)中设置有第二转向轴(10),且第二转向轴(10)上设置有第二齿轮(9),且第二转向轴(10)的顶端固定设置有圆盘(11),且圆盘(11)的端面固定设置有电动伸缩杆(12),且电动伸缩杆(12)的一端设置有卡块(13),且卡块(13)一侧设置有活动槽(14),且活动槽(14)中设置有活动块(15),且卡块(13)的端面设置有定位槽(16),且转向杆(18)活动插接设置在定位槽(16)中,且转向杆(18)的端面固定设置有第二电机(17),且活动块(15)的一端固定设置有摄像头(19)。
3.根据权利要求2所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述固定块(4)与固定槽(5)设置位置相对应、设置组数相同。
4.根据权利要求2所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述第一齿轮(8)与第二齿轮(9)设置位置相对应、设置组数相同,两者相适配啮合传动。
5.根据权利要求2所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述卡块(13)与活动槽(14)、活动块(15)设置位置相对应、设置组数相同,且活动槽(14)与活动块(15)设置尺寸相一致。
6.根据权利要求2所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述定位槽(16)与转向杆(18)设置位置相对应、设置组数相同,且定位槽(16)设置为圆形槽。
7.根据权利要求2所述的一种无人驾驶推土机自动作业监控设备,其特征在于:所述定位槽(16)与卡块(13)、转向杆(18)设置位置相对应、设置组数相同。
技术总结本技术涉及无人驾驶推土机技术领域,具体为一种无人驾驶推土机自动作业监控设备,包括机体、控制臂和调控辅助组件,所述机体的前端设置有控制臂,且控制臂上设置有铲刀,调控辅助组件设置在机体上,且警示灯固定设置在机体的一端,设置的调控辅助组件对无人机驾驶推土机自动作业的监控设备进行调控作业;通过在无人驾驶推土机的端面设置调控辅助组件,对于监控设备的固定设置在调控辅助组件上,其使用过程不受监控设备的角度影响可以进行多方位全面的观测,满足实际使用需求。技术研发人员:孙鑫,张烨昆,张博良,刁目田,李汶昊,刘明洋受保护的技术使用者:济宁职业技术学院技术研发日:20240325技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/337629.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表