莲藕自动化种植机
- 国知局
- 2024-11-25 15:49:44
本申请涉及莲藕种植的,尤其是涉及莲藕自动化种植机。
背景技术:
1、现阶段,莲藕种植户依然运用着手工插秧的方法,此种作业模式涉及劳动强度高、成本高以及生产效率低等特点,不利于莲藕业的现代化发展。随着人们收入水平的逐渐提高,对生活质量提出了更高的要求,传统莲藕种植方式难以满足莲藕市场需求,再加上农村劳动力流失严重,妨碍了农业发展。
2、但由于莲藕种植的种子的特殊性,其种植的是已经培育好的莲藕根茎,使用莲藕根茎可以保持培育出的上一代莲藕的优良品质。每一个的根茎长度与直径都有较大的差别,并且由于莲藕种植的环境需要在3-4cm的水中工作给一般的种植机械增加了防水的要求,以上两个原因是莲藕的种植机械化受到的最大阻碍问题。此外莲藕的根茎块在种植时其尖端会生成新的根茎,新生的根茎较脆,不能直接将莲藕根茎直推到淤泥中,否则会对藕苗的生长产生不利的影响。因此,为解决上述问题,本申请提供了莲藕自动化种植机。
3、本背景技术所公开的上述信息仅仅用于增加对本申请背景技术的理解,因此,其可能包括不构成本领域普通技术人员已知的现有技术。
技术实现思路
1、为了解决现有莲藕种子不便于进行机械化种植的问题,本申请提供莲藕自动化种植机。
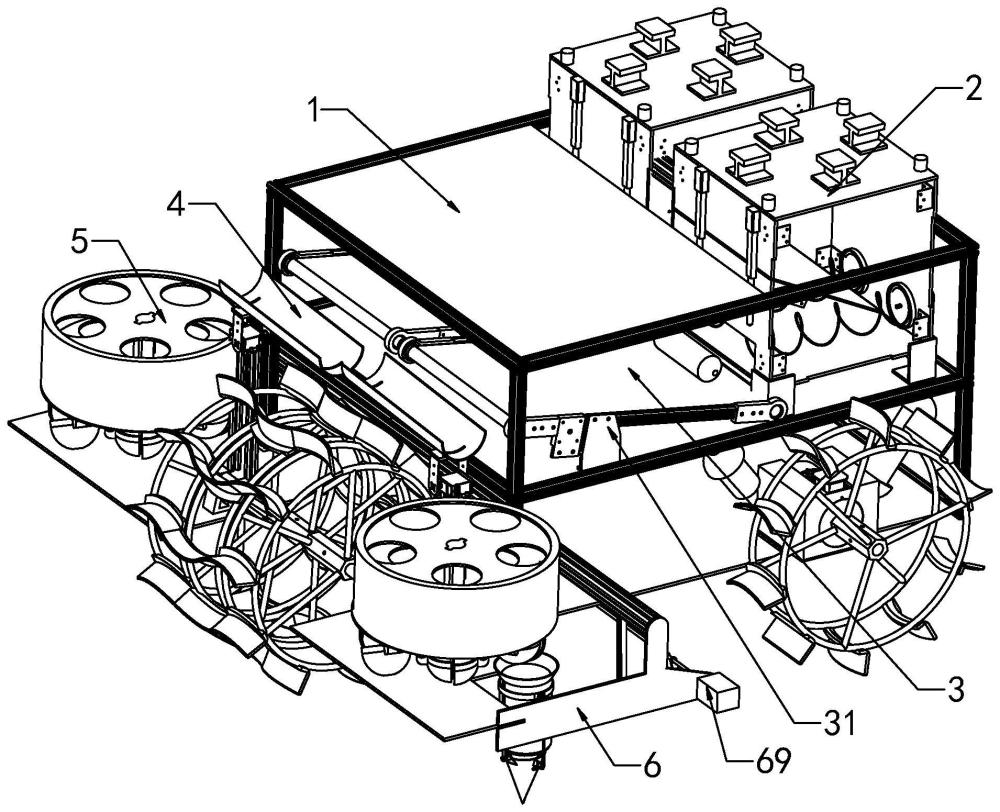
2、本申请提供的莲藕自动化种植机,包括可在浅水淤泥中行进的机体,所述机体的末端耦合有载物机构,机体的前端两侧由上至下均依次设置有旋转托盘、定位卡槽和种植模块,所述载物机构和旋转托盘之间通过倾斜传送带进行藕种输送;
3、所述载物机构包括对藕种进行逐个向前输送的螺旋结构;
4、所述旋转托盘包括绕一端转动的置物平台,置物平台将水平藕种转换成竖直状态;
5、所述定位卡槽包括间歇性转动的卡槽圆盘以及对藕种投下进行控制的罩板,所述卡槽圆盘配合下方的种植模块设置;
6、所述种植模块包括沿45°方向间歇性向淤泥中进行插接的圆筒,圆筒的前端设置有间歇性开合的种植尖嘴,对藕种进行释放、种植。
7、优选的,所述载物机构包括箱体,箱体靠近传送带一侧设置有出料口,箱体的底端螺栓固定连接有电机一,所述螺旋结构固定连接于电机一的输出端,所述箱体的内侧还设置有向螺旋结构末端输料的斜面板。
8、优选的,所述传送带的前端外侧设置有立柱支撑结构。
9、优选的,所述旋转托盘还包括舵机一,所述舵机一的输出端和置物平台之间通过托架固定连接,舵机一传动置物平台在0-90°范围内转动。
10、优选的,所述卡槽圆盘等距设置有至少两个,卡槽圆盘上开设有圆孔,且位于下方的一个卡槽圆盘中心位置设置有步进电机,步进电机传动卡槽圆盘每次运动一个圆孔距离。
11、优选的,所述罩板对称设置有两个,且两个的中心位置开设有通孔,罩板的外侧中点位置通过舵机二和卡槽圆盘转动连接。
12、优选的,所述圆筒的外壁中段设置固定圆环,且固定圆环上方设置有与圆筒滑套的滑动圆环,固定圆环和滑动圆环之间通过紧固弹簧弹性连接,所述种植尖嘴外壁中间位置转动连接有拉杆,且拉杆的顶端和滑动圆环固定连接,所述滑动圆环上还设置有和机体机身之间固定连接。
13、优选的,所述滑动圆环上设置有和外部机体位置固定的拉绳,且拉绳绷直时,种植尖嘴张开。
14、优选的,所述种植模块后侧设置有切比雪夫连杆机构,且切比雪夫连杆机构中l4连杆和固定圆环固定连接,l3连杆转动连接于机体上,l1连杆一端设置有对其传动的电机二,且l1连杆之间通过l2连杆固定连接,l2、l3连杆均和l4连杆之间转动连接。
15、综上所述,本申请包括以下有益技术效果:
16、现有技术采用人工种植藕种的方式,存在成本高、效率低、质量不稳定等问题,本申请通过载物机构对藕种进行转运,藕种在经过螺旋结构、传送带和旋转托盘的作用下,逐个被输送至定位卡槽中,由定位卡槽下方的步进电机再逐一投放至种植模块中,在种植模块后方的切比雪夫连杆机构作用下,被斜向45°插入淤泥之中,完成便捷的种植,以此相较于现有人工种植的方式,具有更低的成本、更高的效率以及稳定的种植质量,具备全面推广的前景。
技术特征:1.莲藕自动化种植机,包括可在浅水淤泥中行进的机体(1),其特征在于:所述机体(1)的末端耦合有载物机构(2),机体(1)的前端两侧由上至下均依次设置有旋转托盘(4)、定位卡槽(5)和种植模块(6),所述载物机构(2)和旋转托盘(4)之间通过倾斜传送带(3)进行藕种输送;
2.根据权利要求1所述的莲藕自动化种植机,其特征在于:所述载物机构(2)包括箱体(21),箱体(21)靠近传送带(3)一侧设置有出料口(211),箱体(21)的底端螺栓固定连接有电机一(23),所述螺旋结构(24)固定连接于电机一(23)的输出端,所述箱体(21)的内侧还设置有向螺旋结构(24)末端输料的斜面板(22)。
3.根据权利要求1所述的莲藕自动化种植机,其特征在于:所述传送带(3)的前端外侧设置有立柱支撑结构(31)。
4.根据权利要求1所述的莲藕自动化种植机,其特征在于:所述旋转托盘(4)还包括舵机一(41),所述舵机一(41)的输出端和置物平台(43)之间通过托架(42)固定连接,舵机一(41)传动置物平台(43)在0-90°范围内转动。
5.根据权利要求1所述的莲藕自动化种植机,其特征在于:所述卡槽圆盘(51)等距设置有至少两个,卡槽圆盘(51)上开设有圆孔,且位于下方的一个卡槽圆盘(51)中心位置设置有步进电机(52),步进电机(52)传动卡槽圆盘(51)每次运动一个圆孔距离。
6.根据权利要求5所述的莲藕自动化种植机,其特征在于:所述罩板(53)对称设置有两个,且两个的中心位置开设有通孔,罩板(53)的外侧中点位置通过舵机二(54)和卡槽圆盘(51)转动连接。
7.根据权利要求1所述的莲藕自动化种植机,其特征在于:所述圆筒(61)的外壁中段设置固定圆环(63),且固定圆环(63)上方设置有与圆筒(61)滑套的滑动圆环(64),固定圆环(63)和滑动圆环(64)之间通过紧固弹簧(65)弹性连接,所述种植尖嘴(62)外壁中间位置转动连接有拉杆(66),且拉杆(66)的顶端和滑动圆环(64)固定连接,所述滑动圆环(64)上还设置有和机体(1)机身之间固定连接。
8.根据权利要求7所述的莲藕自动化种植机,其特征在于:所述滑动圆环(64)上设置有和外部机体(1)位置固定的拉绳(67),且拉绳(67)绷直时,种植尖嘴(62)张开。
9.根据权利要求8所述的莲藕自动化种植机,其特征在于:所述种植模块(6)后侧设置有切比雪夫连杆机构(68),且切比雪夫连杆机构(68)中l4连杆和固定圆环(63)固定连接,l3连杆转动连接于机体(1)上,l1连杆一端设置有对其传动的电机二(69),且l1连杆之间通过l2连杆固定连接,l2、l3连杆均和l4连杆之间转动连接。
技术总结本申请涉及莲藕种植的技术领域,为了解决现有技术采用人工种植藕种的方式,存在成本高、效率低、质量不稳定等问题,本申请提供一种莲藕自动化种植机,包括可在浅水淤泥中行进的机体,所述机体的末端耦合有载物机构,机体的前端两侧由上至下均依次设置有旋转托盘、定位卡槽和种植模块,所述载物机构和旋转托盘之间通过倾斜传送带进行藕种输送;所述定位卡槽包括间歇性转动的卡槽圆盘以及对藕种投下进行控制的罩板;所述种植模块包括沿45°方向间歇性向淤泥中进行插接的种植筒结构,本方案,利用各机构之间的相互配合,实现藕种种植的机械化,从而起到降低成本、提升效率、稳定质量的效果。技术研发人员:贾卓伟,孙浩,高吉扬,杨开迪,孙春富,孙星冉受保护的技术使用者:合肥工业大学技术研发日:20240313技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/338939.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表