层绕机双机械手机构的制作方法
- 国知局
- 2024-11-25 15:55:50
本技术属于金属线材卷绕装置,特别涉及层绕机双机械手机构。
背景技术:
1、在金属线材(例如焊丝)制备过程中,金属线材的层绕是一个重要的环节,其将金属线材一层一层、有规律地缠绕到塑料盘上,确保金属线材缠绕的稳定和整齐。
2、传统的层绕机,通常采用单工位操作,即在一个工位完成金属线材的起始端勾丝、缠绕和末端插丝等步骤,这种操作方式效率较低,无法满足大规模、高效率的生产需求。
3、申请号为201811489471.8的中国专利,公开了一种全自动高速层绕机,其在卷绕主机上设置多个工位,当一个工位的绕线转轴上的塑料盘处于绕线操作时,其余工位可以分别进行上盘操作和下盘操作,极大地提升了收线缠绕的效率。因此,配合该多工位的层绕机,设计一种层绕机双机械手机构,为层绕机的多工位提供挂头勾和挂尾勾,成为了行业内的迫切需求。
技术实现思路
1、鉴于上述现有技术的不足之处,本实用新型的目的在于提供层绕机双机械手机构。
2、为了达到上述目的,本实用新型采取了以下的技术方案。
3、层绕机双机械手机构,其特征在于,包括:
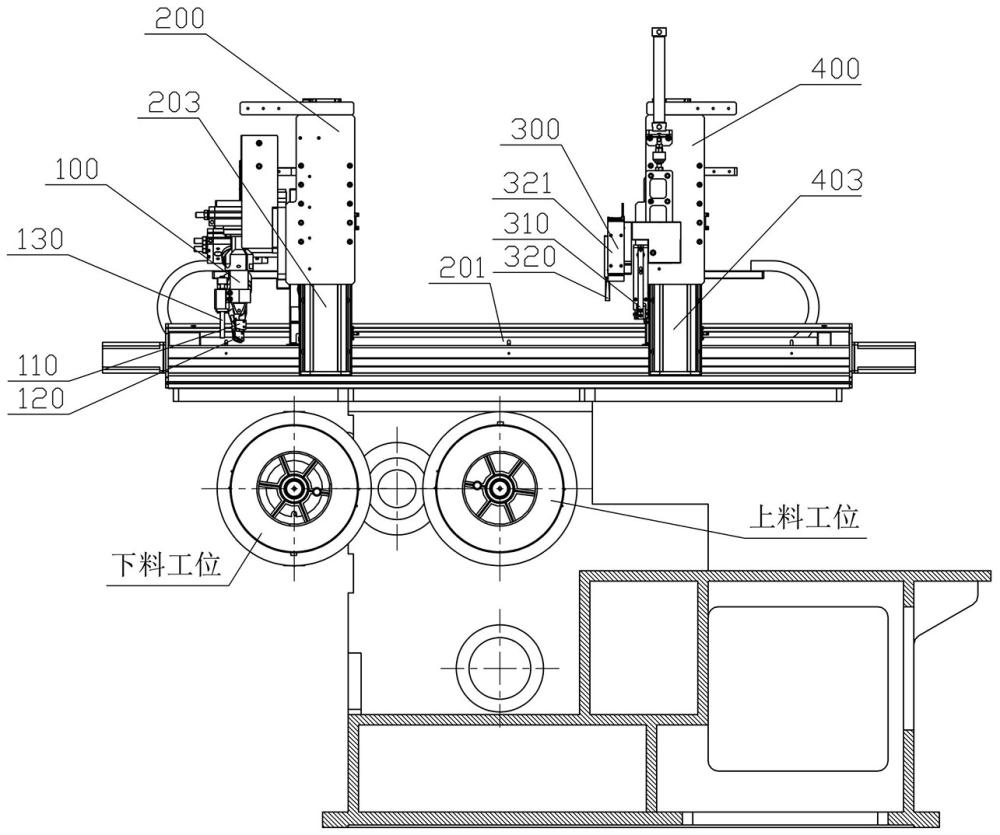
4、尾部机械手,能夹持金属线材的末端,并能将金属线材的末端插设于层套机下料工位塑料盘的尾部勾丝槽;
5、头部机械手,能夹持金属线材的起始端,并能将金属线材的起始端插设于层套机上料工位塑料盘的头部勾丝槽。
6、进一步,所述尾部机械手安装于尾部三轴位移平台;所述尾部三轴位移平台在挂尾勾阶段驱动尾部机械手向下料工位塑料盘的尾部勾丝槽运动;
7、所述头部机械手安装于头部三轴位移平台;所述头部三轴位移平台在挂头勾阶段驱动头部机械手向上料工位塑料盘的头部勾丝槽运动。
8、进一步,所述尾部机械手,包括:
9、挂尾勾夹头,能夹持金属线材的末端;
10、挂尾勾夹头驱动模组,安装于尾部三轴位移平台并连接有所述挂尾勾夹头,并在挂尾勾阶段驱动挂尾勾夹头上下动作和/或旋转动作。
11、进一步,所述挂尾勾夹头驱动模组,包括挂尾勾夹头上下气缸和挂尾勾夹头旋转气缸;所述挂尾勾夹头上下气缸安装于尾部三轴位移平台;所述挂尾勾夹头旋转气缸安装于挂尾勾夹头上下气缸的输出端;所述挂尾勾夹头安装于挂尾勾夹头旋转气缸的输出端。
12、进一步,所述尾部机械手,还包括:
13、尾勾折弯夹头,能夹持穿过尾部勾丝槽的金属线材末端;
14、尾勾折弯夹头驱动模组,安装于尾部三轴位移平台并连接有所述尾勾折弯夹头,并在挂尾勾阶段驱动尾勾折弯夹头位移动作和/或旋转动作。
15、进一步,所述尾勾折弯夹头驱动模组,包括尾勾折弯夹头上下气缸和尾勾折弯夹头旋转气缸;所述尾勾折弯夹头上下气缸安装于尾部三轴位移平台;所述尾勾折弯夹头旋转气缸安装于挂尾勾夹头上下气缸的输出端;所述尾勾折弯夹头安装于尾勾折弯夹头旋转气缸的输出端。
16、进一步,所述尾部机械手,还包括:尾勾赶线棒和尾勾赶线气缸;所述尾勾赶线气缸安装于挂尾勾夹头上下气缸的输出端;所述尾勾赶线棒安装于尾勾赶线气缸输出端;
17、所述尾勾赶线气缸调节尾勾赶线棒相对于挂尾勾夹头的方位;所述挂尾勾夹头、尾勾折弯夹头和尾勾赶线棒均相邻设置。
18、进一步,所述头部机械手,包括:
19、穿头勾夹头,能夹持金属线材的起始端;
20、穿头勾夹头上下气缸,安装于尾部三轴位移平台并连接有所述穿头勾夹头,并在挂头勾阶段驱动穿头勾夹头上下动作。
21、进一步,所述头部机械手,还包括:头勾赶线棒和头勾赶线气缸;所述头勾赶线气缸,安装于穿头勾夹头上下气缸输出端;所述头勾赶线棒安装于头勾赶线气缸;所述头勾赶线气缸驱动头勾赶线棒上下动作。
22、进一步,所述尾部三轴位移平台,包括x轴模组、尾部y轴模组和尾部z轴模组;所述尾部y轴模组安装于x轴模组;所述尾部z轴模组安装于尾部y轴模组;所述挂尾勾夹头驱动模组安装于尾部z轴模组;
23、所述头部三轴位移平台,包括x轴模组、头部y轴模组和头部z轴模组;所述头部y轴模组安装于x轴模组;所述头部z轴模组安装于头部y轴模组;所述穿头勾夹头上下气缸安装于尾部z轴模组;
24、所述尾部三轴位移平台和头部三轴位移平台共用x轴模组;所述x轴模组为双动力模组。
25、本实用新型,在下料工位挂尾勾的同时,在上料工位穿头勾,两者协同工作,同时完成上料与下料操作,从而显著提高焊丝层绕的工作效率。
技术特征:1.层绕机双机械手机构,其特征在于,包括:
2.根据权利要求1所述的层绕机双机械手机构,其特征在于,所述尾部机械手(100)安装于尾部三轴位移平台(200);所述尾部三轴位移平台(200)在挂尾勾阶段驱动尾部机械手(100)向下料工位塑料盘的尾部勾丝槽运动;
3.根据权利要求2所述的层绕机双机械手机构,其特征在于,所述尾部机械手(100),包括:
4.根据权利要求3所述的层绕机双机械手机构,其特征在于,所述挂尾勾夹头驱动模组,包括挂尾勾夹头上下气缸(111)和挂尾勾夹头旋转气缸(112);所述挂尾勾夹头上下气缸(111)安装于尾部三轴位移平台(200);所述挂尾勾夹头旋转气缸(112)安装于挂尾勾夹头上下气缸(111)的输出端;所述挂尾勾夹头(110)安装于挂尾勾夹头旋转气缸(112)的输出端。
5.根据权利要求4所述的层绕机双机械手机构,其特征在于,所述尾部机械手(100),还包括:
6.根据权利要求5所述的层绕机双机械手机构,其特征在于,所述尾勾折弯夹头驱动模组,包括尾勾折弯夹头上下气缸(121)和尾勾折弯夹头旋转气缸(122);所述尾勾折弯夹头上下气缸(121)安装于尾部三轴位移平台(200);所述尾勾折弯夹头旋转气缸(122)安装于挂尾勾夹头上下气缸(111)的输出端;所述尾勾折弯夹头(120)安装于尾勾折弯夹头旋转气缸(122)的输出端。
7.根据权利要求6所述的层绕机双机械手机构,其特征在于,所述尾部机械手(100),还包括:尾勾赶线棒(130)和尾勾赶线气缸(131);所述尾勾赶线气缸(131)安装于挂尾勾夹头上下气缸(111)的输出端;所述尾勾赶线棒(130)安装于尾勾赶线气缸(131)输出端;
8.根据权利要求3或7所述的层绕机双机械手机构,其特征在于,所述头部机械手(300),包括:
9.根据权利要求8所述的层绕机双机械手机构,其特征在于,所述头部机械手(300),还包括:头勾赶线棒(320)和头勾赶线气缸(321);所述头勾赶线气缸(321),安装于穿头勾夹头上下气缸(311)输出端;所述头勾赶线棒(320)安装于头勾赶线气缸(321);所述头勾赶线气缸(321)驱动头勾赶线棒(320)上下动作。
10.根据权利要求9所述的层绕机双机械手机构,其特征在于,
技术总结层绕机双机械手机构,属于金属线材卷绕装置技术领域,包括:尾部机械手,能夹持金属线材的末端,并能将金属线材的末端插设于层套机下料工位塑料盘的尾部勾丝槽;头部机械手,能夹持金属线材的起始端,并能将金属线材的起始端插设于层套机上料工位塑料盘的头部勾丝槽。本技术,在下料工位挂尾勾的同时,在上料工位穿头勾,两者协同工作,同时完成上料与下料操作,从而显著提高焊丝层绕的工作效率。技术研发人员:袁关兴受保护的技术使用者:杭州星冠机械科技有限公司技术研发日:20240412技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/339311.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
可转动式煤炭链的制作方法
下一篇
返回列表