一种应用于视频监控系统的视频巡检过程的方法与流程
- 国知局
- 2024-12-06 12:08:07
本发明涉及视频巡检,特别是一种应用于视频监控系统的视频巡检过程的方法。
背景技术:
1、传统的视频监控系统主要依赖单一摄像头进行视频数据采集,随着图像处理技术和人工智能的进步,现代视频监控系统逐渐引入多摄像头协同工作、多模态数据融合等技术,以提高监控效果和系统的智能化水平。但是现有的视频监控技术在复杂环境和多模态数据融合处理方面仍存在一些不足,例如在低光照和恶劣环境条件下视频质量下降,单一视频数据无法充分检测异常事件等问题。在低光照和恶劣环境条件下,现有视频增强技术无法有效提升图像质量,导致监控效果不佳,尤其是在夜间和恶劣天气条件下。针对这些不足,我方发明提出了一种应用于视频监控系统的视频巡检过程的方法。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述或现有技术中存在的问题,提出了本发明。
3、因此,本发明解决的技术问题是:。在低光照和恶劣环境条件下,现有视频增强技术无法有效提升图像质量,导致监控效果不佳,尤其是在夜间和恶劣天气条件下。
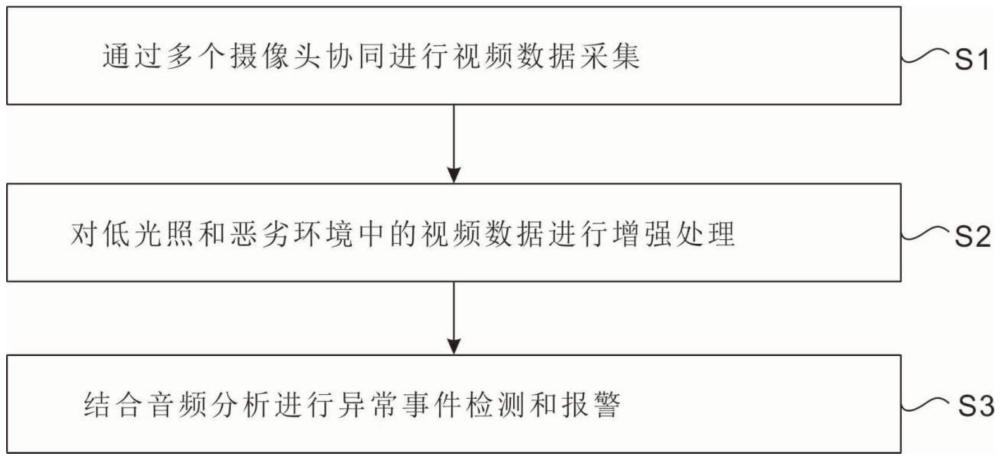
4、为解决上述技术问题,本发明提供如下技术方案:一种应用于视频监控系统的视频巡检过程的方法,其包括通过多个摄像头协同进行视频数据采集;
5、对低光照和恶劣环境中的视频数据进行增强处理;
6、结合音频分析进行异常事件检测和报警。
7、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述通过多个摄像头协同进行视频数据采集包括,
8、构建智能摄像头网络,使摄像头之间进行数据共享;
9、每个摄像头采集自身的视频数据并接收其他摄像头的数据;
10、通过算法实时分析视频数据,根据监控区域的变化自动调整摄像头的视角;
11、所述进行数据共享包括,
12、通过无线网络将摄像头连接在一起,形成数据共享网络;
13、每个摄像头在采集到视频数据后,通过网络将数据发送到中心服务器;
14、中心服务器对接收到的数据进行整合和分析。
15、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述通过算法实时分析视频数据,根据监控区域的变化自动调整摄像头的视角包括,
16、通过实时视频分析算法对采集到的视频数据进行目标检测,识别出监控区域内的移动目标;
17、计算目标的中心位置和运动轨迹,通过kalman滤波器对目标位置进行预测,kalman滤波器的状态更新公式为:
18、
19、其中,为更新后的状态估计,为预测状态估计,kk为kalman增益,zk为测量值,h为观测矩阵;
20、根据预测的目标位置,计算摄像头的最佳视角,视角调整公式为:
21、
22、其中,θ为视角调整角度,ytarget和xtarget为目标位置,ycam和xcam为摄像头位置;
23、控制摄像头的伺服电机,根据计算的调整量实时调整摄像头的视角,使目标位于监控画面的中心位置。
24、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述对低光照和恶劣环境中的视频数据进行增强处理包括,
25、同步获取红外热成像数据与可见光数据,通过数据融合将两种图像叠加,补充可见光不足的状态;
26、通过改进的环境自适应算法,根据环境光照和气象条件的变化自动调整摄像头的曝光时间、增益和滤波参数。
27、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述通过数据融合将两种图像叠加包括,
28、同步获取红外热成像数据iir(i,j)和可见光数据ivis(i,j);
29、将两种数据在时间和空间上进行对齐;
30、对可见光数据进行高斯分布建模,对每个像素ivis(i,j)应用高斯分布函数,表示为:
31、
32、其中,ivis(i,j)为可见光图像的像素值,μ为高斯分布的均值向量,σ为高斯分布的协方差矩阵,d为数据的维度,∣σ∣为协方差矩阵的行列式,(iis(i,j)-μ)t表示像素值减去均值向量后的转置,σ-1为协方差矩阵的逆矩阵;
33、对红外热成像数据进行离散小波变换,提取红外热成像数据的多尺度信息,对每个像素iir(i,j)应用离散小波变换,表示为:
34、
35、其中,iir(i,j)为红外热成像图像的像素值,ψj,k(n)为小波基函数,表示尺度为j和位移为k时的小波函数,为小波基函数的复共轭,n为信号的采样点,n为信号长度;
36、通过小波基函数进行小波变换,表示为:
37、
38、其中,ψdb4(t)为daubechies 4小波基函数,hk为滤波器系数,为尺度函数,t为时间或空间变量;
39、融合红外热成像数据和可见光数据,表示如下:
40、
41、其中,ifused(i,j)为融合后的图像像素值,ivis(i,j)为可见光图像像素值,iir(i,j)为红外热成像图像像素值,αmn和βmn为融合系数,n(iss(i,j)∣μmn,∑mn)为高斯分布函数,μmn为高斯分布的均值,σmn为高斯分布的协方差矩阵,w(ir(i,j)∣ψj,k)为离散小波变换,ψj,k为小波基函数,m为高斯混合分布的数量,n为小波变换的尺度参数,k为小波变换的位移参数。
42、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述根据环境光照和气象条件的变化自动调整包括,
43、通过传感器实时检测环境的光照和气象条件并进行预处理。
44、通过预处理后的数据,计算摄像头的曝光时间、增益和滤波参数。
45、根据计算结果,动态调整摄像头参数以适应环境变化。
46、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述通过传感器实时检测环境的光照和气象条件并进行预处理包括,
47、通过传感器实时检测环境光照强度l、温度t和湿度h;
48、通过指数平滑函数分别对数据进行处理以减少噪声,表示为:
49、ls=αll+(1-αl)ls-1
50、ts=αtt+(1-αt)ts-1
51、hs=αhh+(1-αh)hs-1
52、其中,ls为平滑后的光照强度,αl为光照强度的平滑系数,ls-1为前一时刻的平滑光照强度;ts为平滑后的温度,αt为温度的平滑系数,ts-1为前一时刻的平滑温度;hs为平滑后的湿度,αh为湿度的平滑系数,hs-1为前一时刻的平滑湿度;
53、根据平滑后的光照强度ls,计算摄像头的曝光时间,表示为:
54、
55、其中,texposure为调整后的曝光时间,t0为基本曝光时间;
56、根据平滑后的光照强度ls和温度ts,计算摄像头的增益g表示为:
57、
58、其中,g为调整后的增益,g0为基本增益,log2为以2为底的对数,βt为温度影响系数;
59、根据平滑后的湿度hs,调整摄像头的低通滤波器参数,表示为:
60、
61、
62、其中,h(f)为调整后的滤波器传递函数,h0(f)为基本传递函数,γh为湿度影响系数,f为频率;fc为截止频率;n为滤波器的阶数。
63、作为本发明所述应用于视频监控系统的视频巡检过程的方法的一种优选方案,其中:所述结合音频分析进行异常事件检测和报警包括,
64、结合视频和音频数据,通过多模态数据融合进行数据分析;
65、建立包含各种异常声音特征的数据库,利用机器学习算法对音频数据进行分类和识别;
66、实时检测和识别环境中的异常声音,并结合视频数据进行事件确认和定位;
67、根据检测到的异常声音和视频信息自动生成报警信息并通知相关安全人员。
68、本发明的有益效果:本发明通过多个摄像头协同进行视频数据采集,有效覆盖监控盲区,提高系统的整体监控效果;对低光照和恶劣环境中的视频数据进行增强处理,确保在各种复杂环境条件下都能获取高质量的监控图像;结合音频分析进行异常事件检测和报警,提高了异常事件检测的准确性和实时性,从而提升了视频监控系统的整体性能和智能化水平。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339502.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表