自适应量测噪声协方差的雷达共存目标跟踪方法
- 国知局
- 2024-12-06 12:08:19
本发明涉及一种雷达共存目标跟踪方法,具体涉及一种自适应量测噪声协方差的雷达共存目标跟踪方法,属于雷达目标跟踪。
背景技术:
1、雷达多目标跟踪是雷达系统中重要的功能之一,随着现代传感器分辨率的不断提高,传感器的每次扫描都会在单个目标表面上形成多个测量生成点。具体来说,与传感器分辨率相比,可能存在一些目标很小,而另一些目标很大,这意味着视场中存在共存的点/扩展目标。例如,行人可能被建模为点目标,而车辆则被建模为扩展目标。在实际应用中,量测噪声通常会随时间变化,目标信息往往会受到各种干扰信息的破坏,即传感器获得的真实目标测量值会受到随机测量噪声的影响。现有的目标跟踪方法都将量测噪声设为恒定值,这将会导致跟踪性能下降。因此,本发明开发一种自适应量测噪声协方差的雷达共存目标跟踪方法,解决量测噪声协方差未知时多个扩展目标和点目标共存场景下目标跟踪的问题。
技术实现思路
1、为解决量测噪声协方差未知时,共存点/扩展目标场景下多目标跟踪问题,本发明提供一种自适应量测噪声协方差的雷达共存目标跟踪方法,其核心技术在于,将点目标建模为高斯分布,扩展目标建模为伽玛高斯逆威沙特(ggiw)分布,用逆威沙特分布的随机矩阵表示量测噪声协方差,再利用变分贝叶斯(vb)算法逼近测量噪声协方差与目标状态组成的联合概率密度函数,从而随着时间步自适应地计算量测噪声协方差。
2、本发明为解决上述技术问题采用以下技术方案:
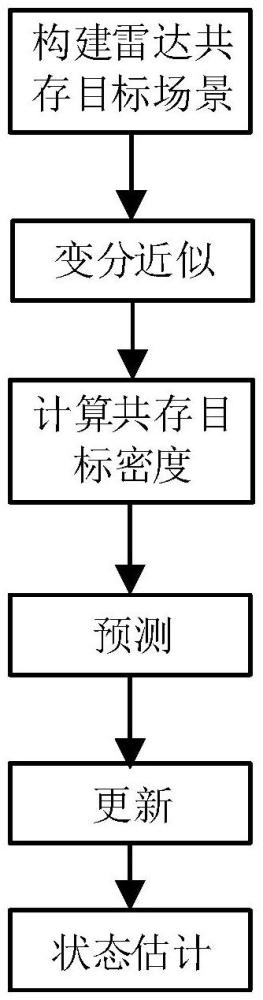
3、本发明提供一种自适应量测噪声协方差的雷达共存目标跟踪方法,其特征在于,该方法包括如下步骤:
4、步骤1、构建雷达共存目标跟踪场景:将点目标建模为高斯分布,扩展目标建模为伽玛高斯逆威沙特分布,简称ggiw分布,获得目标模型;
5、步骤2、变分近似:基于目标模型,用逆威沙特分布的随机矩阵表示量测噪声协方差,并将该量测噪声协方差增广至点目标的状态和扩展目标的状态中,再利用变分贝叶斯算法,简称vb算法,逼近量测噪声协方差与目标状态组成的联合概率密度函数,从而得到新的扩展目标和点目标后验概率分布计算公式,并且随着时间步自适应地计算量测噪声协方差;
6、步骤3、计算共存目标密度:利用新的扩展目标和点目标后验概率分布计算公式计算共存目标的泊松点过程密度和伯努利密度;
7、步骤4、预测:基于共存目标的泊松点过程密度和伯努利密度,进行泊松点过程预测和多伯努利混合预测,得到k+1时刻预测的泊松点过程目标强度和伯努利目标的后验密度,其中泊松点过程目标强度,简称ppp目标强度,伯努利目标简称bernoulli目标,ppp目标是指新生目标和一直未检测到的目标总称,bernoulli目标是至少检测到一次的目标;
8、步骤5、更新:利用预测的ppp目标强度和bernoulli目标的后验密度,更新检测和漏检测的ppp目标强度以及检测和漏检测的bernoulli目标参数;
9、步骤6、状态估计:若k+1时刻目标为扩展目标的概率θk+1|k+1>0.5,则认为是扩展目标,否则认为是点目标。
10、作为本发明的进一步技术方案,步骤1的具体方法如下:
11、目标状态空间表示为其中和χe分别表示点目标和扩展目标的状态空间,符号表示不相交并集,点目标和扩展目标分别用高斯分布模型和ggiw分布模型建模如下:
12、点目标用高斯分布模型建模,点目标的状态表示为若一个目标则点目标模型fp(z|x)表示为:
13、
14、式中表示点目标的检测概率,表示均值为h1x,协方差为r1的高斯分布,h1和r1分别表示点目标的测量矩阵和噪声协方差矩阵,z表示多目标量测集合,z表示单个目标量测向量;
15、扩展目标的状态表示为其中γk,ξk和xk分别表示量测率、质心状态和扩展状态,若一个目标x∈χe,则扩展目标模型fe(z|x)表示为:
16、
17、式中表示扩展目标的检测概率,γ(x)=γ表示量测率,表示均值为h2ξ,协方差为r2的高斯分布,h2和r2分别表示扩展目标的测量矩阵和噪声协方差矩阵。
18、作为本发明的进一步技术方案,步骤2的具体方法如下:
19、量测方程表示为zk=h(xk)+vk,式中h(xk)表示目标的测量矩阵,表示量测噪声,其中rk表示量测噪声协方差,rk用逆威沙特分布来表示其统计特性,将rk增广至目标状态中;
20、对于扩展目标,则有其中γk,ξk,xk和分别表示k时刻扩展目标的量测率、质心状态、扩展状态和量测噪声协方差;
21、根据k时刻的后验概率分布和k+1时刻的量测集zk+1,计算出k+1时刻的后验概率分布为:
22、
23、利用vb算法,式(3)表示为:
24、
25、式中和分别表示伽玛分布、高斯分布、逆威沙特分布,γk+1,ξk+1,xk+1和分别表示k+1时刻扩展目标的量测率、质心状态、扩展状态和量测噪声协方差;αk+1和βk+1是伽玛分布的两个参数,分别表示k+1时刻扩展目标的形状参数和尺度参数;mk+1和pk+1是高斯分布的两个参数,分别表示k+1时刻扩展目标的均值和协方差;vk+1和vk+1,uk+1和uk+1是逆威沙特分布的参数,vk+1和vk+1分别表示k+1时刻扩展目标的扩展状态xk+1的自由度和逆尺度矩阵,uk+1和uk+1分别表示k+1时刻扩展目标的量测噪声协方差的自由度和逆尺度矩阵;
26、对于点目标,则有其中αk表示标准点目标模型中的运动状态(如位置、速度),表示点目标的量测噪声协方差,根据k时刻的后验概率分布和k+1时刻的量测集zk+1计算出k+1时刻的后验概率分布为:
27、
28、利用变分贝叶斯(vb)算法,式(5)可表示为:
29、
30、其中,和分别表示高斯分布、逆威沙特分布,nk+1和qk+1是高斯分布的两个参数,分别表示k+1时刻点目标的均值和协方差;wk+1和wk+1是逆威沙特分布的参数,分别表示k+1时刻点目标的自由度和逆尺度矩阵。
31、作为本发明的进一步技术方案,步骤3的具体方法如下:
32、共存目标的泊松点过程密度d(x)为:
33、
34、其中,
35、
36、其中表示扩展目标密度,ζe={α,β,m,p,v,v,u,u}表示扩展目标的参数,α和β分别表示扩展目标的形状参数和尺度参数,m和p分别表示扩展目标的均值和协方差,v和v分别表示扩展状态的自由度和逆尺度矩阵,u和u分别表示扩展目标的量测噪声协方差的自由度和逆尺度矩阵;表示点目标密度,ζp={n,q,w,w}表示点目标的参数,n和q分别表示点目标的均值和协方差,w和w分别表示点目标的量测噪声协方差的自由度和逆尺度矩阵;ne和np分别表示扩展目标的数量和点目标的数量,ωe和ωp分别表示扩展目标的权值和点目标的权值;
37、共存目标的伯努利密度f(x)为:
38、
39、其中θ和(1-θ)分别表示目标为扩展目标和点目标的概率。
40、作为本发明的进一步技术方案,步骤4的具体方法如下:
41、预测分为泊松点过程预测和多伯努利混合预测两部分,根据k时刻泊松点过程目标的后验强度dk|k(x),计算出k+1时刻预测的泊松点过程目标强度dk+1|k(x)为:
42、
43、式中表示k时刻扩展目标的数量,表示k时刻点目标的数量,表示第n个扩展目标分量在k时刻的权值,表示k+1时刻预测的第n个扩展目标密度,表示k+1时刻预测的第n个扩展目标参数;表示第n个点目标分量在k时刻的权值,表示k+1时刻预测的第n个点目标密度,表示k+1时刻预测的第n个点目标参数;ps表示目标存活概率,γk+1(x)表示k+1时刻新生目标强度;
44、根据k时刻bernoulli目标的后验密度其中表示k时刻第j个全局假设的权值,和分别表示k时刻第j个全局假设对应的第i个多伯努利目标的存在概率和状态密度,表示k时刻第j个全局假设对应的伯努利索引集,表示k时刻全局假设的索引集;计算k+1时刻预测的bernoulli目标后验密度为:
45、
46、其中表示k+1时刻预测的第j个全局假设的权值,和分别表示k+1时刻预测的第j个全局假设对应的第i个多伯努利目标的存在概率和状态密度,θk+1|k=θk|k表示k+1时刻预测目标为扩展目标的概率,θk|k表示k时刻目标为扩展目标的概率;和分别表示k+1时刻预测的第j个全局假设对应的第i个多伯努利扩展目标和点目标密度,和分别表示k+1时刻预测的第j个全局假设对应的第i个多伯努利扩展目标和点目标的参数。
47、作为本发明的进一步技术方案,步骤5的具体方法如下:
48、ppp目标漏检测更新强度dk+1|k+1(x)为:
49、
50、式中和表示k+1时刻预测的扩展目标和点目标数量,和表示k+1时刻第n项未被检测到的扩展目标和点目标的概率,和表示k+1时刻第n项扩展目标和点目标未被匹配到量测的概率,表示k+1时刻第n个扩展目标的参数,表示k+1时刻第n个点目标的参数,表示k+1时刻更新的第n个扩展目标密度,表示k+1时刻更新的第n个点目标密度;
51、检测到的ppp目标转化为bernoulli目标的更新参数为:
52、检测到的ppp目标的存在概率为:
53、
54、其中表示量测集似然,c表示划分好的量测单元,κc表示量测单元c中被关联的杂波的强度;
55、检测到的ppp目标的状态密度:
56、
57、其中θk+1|k+1和(1-θk+1|k+1)分别表示k+1时刻目标为扩展目标和点目标的概率,和表示k+1时刻第n项扩展目标和点目标的权值;
58、漏检测的bernoulli目标更新参数为:
59、漏检测的bernoulli目标的存在概率为:
60、
61、其中表示k+1时刻预测的第j个全局假设对应的第i个bernoulli目标的存在概率,表示k+1时刻空量测集的似然,计算如下:
62、
63、其中表示k+1时刻扩展目标的量测似然,θk+1|k+1表示k+1时刻目标为扩展目标的概率;
64、漏检测的bernoulli目标的状态密度
65、
66、其中,和表示k+1时刻第j个全局假设对应的第i个bernoulli扩展目标未被检测到和未被匹配到量测的概率,和表示k+1时刻第j个全局假设对应的第i个bernoulli点目标未被检测到和未被匹配到量测的概率,表示k+1时刻第j个全局假设对应的第i个bernoulli扩展目标参数,表示k+1时刻第j个全局假设对应的第i个bernoulli点目标参数,和表示k+1时刻更新的第j个全局假设对应的第i个多伯努利扩展目标和点目标密度;
67、检测到的bernoulli目标的更新参数为:
68、检测到的bernoulli目标的存在概率为:
69、
70、检测到的bernoulli目标的状态密度为:
71、
72、作为本发明的进一步技术方案,步骤4中关于量测噪声协方差的参数预测公式为:uk+1|k=λuk|k,uk+1|k=λuk|k,wk+1|k=λwk|k,wk+1|k=λwk|k,其中λ∈(0,1],uk+1|k和uk+1|k表示k+1时刻预测的扩展目标量测噪声协方差的自由度和逆尺度矩阵,wk+1|k和wk+1|k表示k+1时刻预测的点目标量测噪声协方差的自由度和逆尺度矩阵,uk|k和uk|k表示k时刻扩展目标量测噪声协方差的自由度和逆尺度矩阵,wk|k和wk|k表示k时刻点目标量测噪声协方差的自由度和逆尺度矩阵。
73、作为本发明的进一步技术方案,步骤5中量测噪声协方差的更新公式如下:
74、
75、其中和分别表示k+1时刻扩展目标和点目标的量测噪声协方差,d是量测噪声的维度。
76、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
77、(1)将点目标建模为高斯分布,扩展目标建模为伽玛高斯逆威沙特(ggiw)分布,开发出能够同时跟踪点目标和扩展目标的模型。
78、(2)用逆威沙特分布的随机矩阵表示量测噪声协方差,再利用变分贝叶斯(vb)算法逼近测量噪声协方差与目标状态组成的联合概率密度函数,从而随着时间步自适应地计算量测噪声协方差,无需将量测噪声协方差事先设置为某个定值。
79、(3)该方法可以同时解决量测噪声未知和点/扩展目标共存的问题。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339529.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表