一种集群无人机目标识别优化方法、装置、设备及介质与流程
- 国知局
- 2024-12-06 12:12:23
本发明涉及图像处理,特别是涉及一种可实现集群无人机采集图像去重的集群无人机目标识别优化方法、装置、设备及介质。
背景技术:
1、随着数字图像处理和计算机视觉的不断发展,使用无人机通过巡航方式进行图像采集及目标侦查打击的应用越来越普遍。目前,基于图像采集的方法已经成为航空图像目标检测的主流方法,但是现有的方法仍然存在着效率较低,识别重复不准确和识别目标数量过多等问题,影响了小目标和动目标检测的效果。一部分研究者致力于提取更精确的图像特征信息用于检测,但现有的方法并不能有效提取图像的高维语义信息,抑制复杂背景的干扰带来的重复识别。
2、同时,单一无人机在高空、高速的条件下采集的图像具有重复率高、置信度低的特征,给后期无人机的侦查打击工作带来很大的不便,在很大程度上抑制了无人机在作战领域的应用与发展。现有的图像处理算法虽然在大雾、夜间拍摄条件下的图像质量的提高上有明显效果,但是至今仍然没有很有效地消除图像目标的识别重复性高的问题。
3、因此,如何提供一种可以有效实现精确识别集群无人机目标识别方法,是迫切需要本领域技术人员解决的技术问题。
技术实现思路
1、鉴于上述问题,本发明提供用于克服上述问题或者至少部分地解决上述问题的一种集群无人机目标识别优化方法、装置、设备及介质。
2、本发明提供了如下方案:
3、一种集群无人机目标识别优化方法,包括:
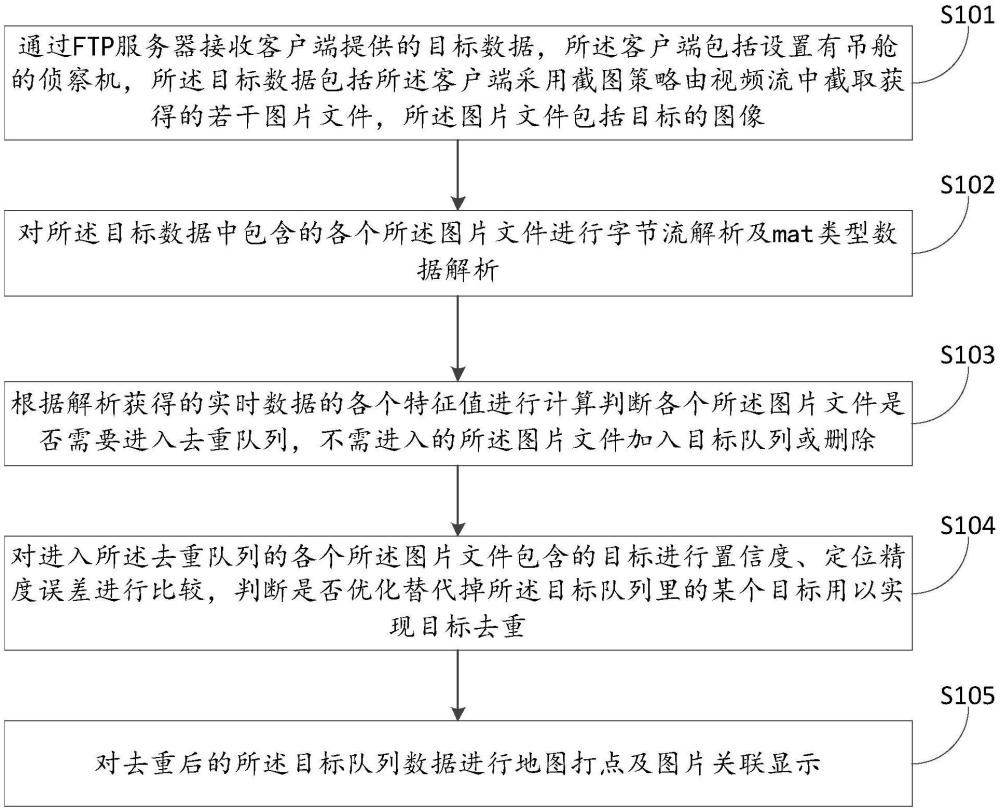
4、通过ftp服务器接收客户端提供的目标数据,所述客户端包括设置有吊舱的侦察机,所述目标数据包括所述客户端采用截图策略由视频流中截取获得的若干图片文件,所述图片文件包括目标的图像;
5、对所述目标数据中包含的各个所述图片文件进行字节流解析及mat类型数据解析;
6、根据解析获得的实时数据的各个特征值进行计算判断各个所述图片文件是否需要进入去重队列,不需进入的所述图片文件加入目标队列或删除;
7、对进入所述去重队列的各个所述图片文件包含的目标进行置信度、定位精度误差进行比较,判断是否优化替代掉所述目标队列里的某个目标用以实现目标去重;
8、对去重后的所述目标队列数据进行地图打点及图片关联显示。
9、优选地:所述截图策略包括在红外或可见光视频中,满足以下条件就需要触发截图功能:
10、确定视频的坐标是左上角(0,0)、右下角(1920,1080);
11、确定坐标是左上角(0,100)、右下角(1920,100)的a线、坐标是左上角(0,540)、右下角(1920,540)的b线以及坐标是左上角(0,980)、右下角(1920,980)的c线;
12、有目标从上至下或者自下至上穿越a线、b线和c线时,触发截图;
13、在a线与c线之间的区域里,出现了新的目标触发截图;
14、所有触发截图的目标都用绿色进行颜色标注,除非有其它目标触发了新的截图,否则该目标的标注一直是绿色,反之其它目标就采用红色标注;
15、从屏幕顶端或者底端出现的目标,还未穿越警戒线,先用红色标注,待穿越警戒线时启动截图。
16、优选地:所述字节流解析根据如下协议进行识别解析:
17、a:同步码,2个字节;
18、b:帧控制指令,对每一帧的控制,1个字节;
19、c:帧计数器,每一帧的标识,2个字节,范围0~65536,反复循环;
20、d:目标1信息,14个字节,确定了该目标的信息;
21、e:目标2信息,14个字节,确定了该目标的信息;
22、f:目标3信息,14个字节,确定了该目标的信息;
23、xx:目标xx信息,14个字节,确定了该目标的信息;
24、xx8:目标8信息,14个字节,确定了该目标的信息;
25、h:校验字节,第3字节~第46字节异或校验低8位。
26、优选地:所述mat类型数据解析根据如下协议进行识别解析:
27、a:com标识,2个字节,ff fe;
28、b:目标信息,16个字节,确定了该目标的信息;
29、c:目标在图像上位置,8个字节;
30、d:吊舱的位置信息,16个字节。
31、优选地:所述对进入所述去重队列的各个所述图片文件包含的目标进行置信度、定位精度误差进行比较,判断是否优化替代掉所述目标队列里的某个目标用以实现目标去重包括:
32、若所述图片文件包含的目标为动目标,确定编号没有相同的,进入所述去重队列;
33、若所述图片文件包含的目标为动目标,如果有编号相同的,且目标置信度小于85%,进入所述目标队列;
34、若所述图片文件包含的目标为动目标,如果有编号相同的,且目标置信度同时大于等于85%确定去重,并结束遍历;
35、若所述图片文件包含的目标为静目标,属于不同类别目标,确定进入所述目标队列;
36、若所述图片文件包含的目标为静目标,属于同类别目标,不在该目标距离误差范围内,确定进入所述目标队列;
37、若所述图片文件包含的目标为静目标,属于同类别目标,在该目标距离误差范围内,目标范围内有多目标,确定去重,并结束遍历;
38、若所述图片文件包含的目标为静目标,属于同类别目标,在该目标距离误差范围内,目标范围内单目标,且目标置信度小于85%,确定进入所述目标队列;
39、若所述图片文件包含的目标为静目标,属于同类别目标,在该目标距离误差范围内,目标范围内单目标,且目标置信度大于等于85%,确定去重,并结束遍历。
40、优选地:在地图上利用其经纬度信息进行打点,以便一个点对应一张目标图片路径。
41、一种集群无人机目标识别优化装置,用于执行上述的集群无人机目标识别优化方法,所述装置包括:
42、目标数据接收单元,用于通过ftp服务器接收客户端提供的目标数据,所述客户端包括设置有吊舱的侦察机,所述目标数据包括所述客户端采用截图策略由视频流中截取获得的若干图片文件,所述图片文件包括目标的图像;
43、解析单元,用于对所述目标数据中包含的各个所述图片文件进行字节流解析及mat类型数据解析;
44、是否进入去重队列判断单元,用于根据解析获得的实时数据的各个特征值进行计算判断各个所述图片文件是否需要进入去重队列,不需进入的所述图片文件加入目标队列或删除;
45、去重单元,用于对进入所述去重队列的各个所述图片文件包含的目标进行置信度、定位精度误差进行比较,判断是否优化替代掉所述目标队列里的某个目标用以实现目标去重;
46、打点显示单元,用于对去重后的所述目标队列数据进行地图打点及图片关联显示。
47、一种集群无人机目标识别优化设备,所述设备包括处理器以及存储器:
48、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
49、所述处理器用于根据所述程序代码中的指令执行上述的集群无人机目标识别优化方法。
50、一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行上述的集群无人机目标识别优化方法。
51、根据本发明提供的具体实施例,本发明公开了以下技术效果:
52、本技术实施例提供的一种集群无人机目标识别优化方法、装置、设备及介质,该方法能够有效地改善单机吊舱重复识别同一目标、多机吊舱重复识别同一目标从而在地面站上打点过多影响使用者判断的状态。地面站根据拿到的目标数据进行字节流解析及mat类型数据解析;根据实时数据的各个特征值进行计算判断是否需要进入去重队列,不需进入的目标加入目标集或删除,最后对进入去重队列的目标进行置信度、定位精度误差等值的比较判断是否优化替代掉目标队列里的某个目标。提升了识别的准确性、达到精准打击的效果,并可以将其余包含重复目标的图片删除,减少开发板内存占用。
53、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339936.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。